Вам также может понравиться
- Advanced - Rotational MotionДокумент8 страницAdvanced - Rotational MotionSushmit GuptaОценок пока нет
- SHM QuizДокумент4 страницыSHM QuizAndey HemanthОценок пока нет
- Section A: Multiple Choice TypeДокумент10 страницSection A: Multiple Choice TypeMahendra PandaОценок пока нет
- Engineering Tripos Part IB Second YearДокумент5 страницEngineering Tripos Part IB Second YearluchogilmourОценок пока нет
- TestДокумент17 страницTestPhantom1699Оценок пока нет
- GR16Документ2 страницыGR16Salim DávilaОценок пока нет
- 31-12-2323 - JR - Star Co-Sc (Model-B) - Jee - Main - CTM-28 - QP FinalДокумент22 страницы31-12-2323 - JR - Star Co-Sc (Model-B) - Jee - Main - CTM-28 - QP Finalholaheg352Оценок пока нет
- Eklavyats-2023-Part Test 1 (Physics) : QuestionsДокумент34 страницыEklavyats-2023-Part Test 1 (Physics) : QuestionsSaptarshiОценок пока нет
- Classical Mechanics IIT Jam Practice PaperДокумент4 страницыClassical Mechanics IIT Jam Practice PapershivanandОценок пока нет
- Adobe Scan 18-May-2023 - 230520 - 204503Документ4 страницыAdobe Scan 18-May-2023 - 230520 - 204503gaminglucky888Оценок пока нет
- Prerna Classes-AIEEE 2009 PhysicsДокумент8 страницPrerna Classes-AIEEE 2009 PhysicsSM200100% (1)
- Week10 AssignmentДокумент3 страницыWeek10 AssignmentvijaysharanОценок пока нет
- Physics - (Work & Circular) - AssignmentДокумент9 страницPhysics - (Work & Circular) - Assignmentmalani.swastikОценок пока нет
- 3C5 Exam 2019Документ12 страниц3C5 Exam 2019kotagoОценок пока нет
- Exam16 PDFДокумент4 страницыExam16 PDFmichael pasquiОценок пока нет
- Iit Jam Physics 2015Документ10 страницIit Jam Physics 2015Subha NayakОценок пока нет
- Mechanics and General Properties of Matter PDFДокумент36 страницMechanics and General Properties of Matter PDFSuhanyakabiОценок пока нет
- Xi ND Phy NeetДокумент7 страницXi ND Phy NeetDeena chemistОценок пока нет
- Problem Set IДокумент4 страницыProblem Set IRUDRA KHANRAОценок пока нет
- Csir-Ugc-Net/Jrf - Gate - Physics: V X That Satisfies The Condition (V X VXДокумент4 страницыCsir-Ugc-Net/Jrf - Gate - Physics: V X That Satisfies The Condition (V X VXAbhrajit MahapatraОценок пока нет
- Jee Main Solved Paper 2019Документ39 страницJee Main Solved Paper 2019Dhakad Ji DeepakОценок пока нет
- Part A: Three Mark Questions: X y Z X yДокумент11 страницPart A: Three Mark Questions: X y Z X yKiron SkОценок пока нет
- Vmts Jee Full Test 5 Question Paper & Answer KeyДокумент14 страницVmts Jee Full Test 5 Question Paper & Answer Keyharshit pandeyОценок пока нет
- Sample Paper: Class: XI General InstructionsДокумент8 страницSample Paper: Class: XI General InstructionsmadhavОценок пока нет
- Part - A (Physics) : Jee Main 2019 - 10 April - Morning Shift MathongoДокумент37 страницPart - A (Physics) : Jee Main 2019 - 10 April - Morning Shift Mathongorohit574Оценок пока нет
- Phy306 ProbsДокумент25 страницPhy306 ProbsKazi Abu RousanОценок пока нет
- WORK, POWER, ENERGY & MOMENTUM Important QuestionsДокумент18 страницWORK, POWER, ENERGY & MOMENTUM Important QuestionsRavindra KumarОценок пока нет
- Jahir Sir ED Test Series PDFДокумент5 страницJahir Sir ED Test Series PDFTushar GhoshОценок пока нет
- Part - A (Physics) : Jee Main 2019 - 11 January - Morning Shift MathongoДокумент35 страницPart - A (Physics) : Jee Main 2019 - 11 January - Morning Shift MathongoManya SinghОценок пока нет
- Classical Mechanics (NETGATE) PDFДокумент30 страницClassical Mechanics (NETGATE) PDFSaley SaeedОценок пока нет
- Ps 9Документ3 страницыPs 9Muskan BuraОценок пока нет
- JEE Main 2023 31 January Shift 2Документ13 страницJEE Main 2023 31 January Shift 2barnwalk367Оценок пока нет
- JEE Main 2023 Jan 31 Shift 2 Physics Question Paper (Memory-Based)Документ4 страницыJEE Main 2023 Jan 31 Shift 2 Physics Question Paper (Memory-Based)Nachiketha RОценок пока нет
- Kvpy Class 11 Sa Stream Mock Test-2 (Cty P-1 Syllabus)Документ7 страницKvpy Class 11 Sa Stream Mock Test-2 (Cty P-1 Syllabus)TEJA SINGH0% (2)
- Iit Jam Physics 2007 PDFДокумент6 страницIit Jam Physics 2007 PDFKritiraj KalitaОценок пока нет
- Test-84 Adv P2 QPДокумент17 страницTest-84 Adv P2 QPuser 12Оценок пока нет
- Xi ND Phy IitДокумент4 страницыXi ND Phy IitDeena chemistОценок пока нет
- JEE Main 31-01-2024 (Evening Shift) : B X at 2 1 1 2 1 1 2 1 0 0 1 1Документ45 страницJEE Main 31-01-2024 (Evening Shift) : B X at 2 1 1 2 1 1 2 1 0 0 1 1Mahir KachwalaОценок пока нет
- Part-A Single Correct Choice Type (1-20) : NWCM822O1S - Ph-IV - Mains - 27-04-21 - PYKДокумент7 страницPart-A Single Correct Choice Type (1-20) : NWCM822O1S - Ph-IV - Mains - 27-04-21 - PYKAtulОценок пока нет
- LOUPL 18 March Full Syl Adv PaperДокумент15 страницLOUPL 18 March Full Syl Adv PaperNIMISH MUTYAPUОценок пока нет
- Physics Chemistry Mathematics IITJEE TestДокумент17 страницPhysics Chemistry Mathematics IITJEE TestAbhay Kumar Nayak100% (5)
- Cosmog PDFДокумент10 страницCosmog PDFAlexandre Masson VicenteОценок пока нет
- Exersice Set2 2024Документ3 страницыExersice Set2 2024Ayoub GHOULОценок пока нет
- Ugc Academy: Test Series # 2Документ10 страницUgc Academy: Test Series # 2JeevanОценок пока нет
- Yakeen - 2.O Atomic Structure: Xy X yДокумент3 страницыYakeen - 2.O Atomic Structure: Xy X yM.Tharun KumarОценок пока нет
- Jee Main 06 April 2023 Shift 1 Physics Memory Based Paper Solution - PHPДокумент13 страницJee Main 06 April 2023 Shift 1 Physics Memory Based Paper Solution - PHPAshish JhaОценок пока нет
- JEE Main Question Paper Session 2 April 6 Physics Reliable KotaДокумент13 страницJEE Main Question Paper Session 2 April 6 Physics Reliable KotaUjwalОценок пока нет
- JEE Main 01-02-2024 (Morning Shift) : QuestionsДокумент41 страницаJEE Main 01-02-2024 (Morning Shift) : QuestionsMahir KachwalaОценок пока нет
- Holiday - Assignment & Practical WorkДокумент15 страницHoliday - Assignment & Practical WorkAbhi WaliaОценок пока нет
- 26 June Slot 1Документ26 страниц26 June Slot 1UroojОценок пока нет
- 06 System of Particles and Rotational MotionДокумент3 страницы06 System of Particles and Rotational MotionMUHAMMED ANAS KОценок пока нет
- 2022 Mock JEE Main - 1 - PaperДокумент12 страниц2022 Mock JEE Main - 1 - Paperstudent timeОценок пока нет
- 2022 Question PaperДокумент15 страниц2022 Question PaperlafaОценок пока нет
- JEE Main Sample Paper-1Документ44 страницыJEE Main Sample Paper-1Nandana ManikandanОценок пока нет
- AYJR 2023 (Advanced) Paper 1 With Provisional Answer KeysДокумент32 страницыAYJR 2023 (Advanced) Paper 1 With Provisional Answer KeysTech Spider in Telugu50% (2)
- Lecture Based Problem Sheet: Topics: SHM and Waves Faculty: Moni KakatiДокумент3 страницыLecture Based Problem Sheet: Topics: SHM and Waves Faculty: Moni KakatiMoni KakatiОценок пока нет
- PG TRB Physics Fulltest - 5 - K.s.academy SalemДокумент18 страницPG TRB Physics Fulltest - 5 - K.s.academy SalemBaskar CyrilОценок пока нет
- Tables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiОт EverandTables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiОценок пока нет
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27От EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Оценок пока нет
- Lecture 1 22 SlidesДокумент21 страницаLecture 1 22 SlidesNikhilSharmaОценок пока нет
- 30 4 MTRX NormsДокумент12 страниц30 4 MTRX NormsOsman HusseinОценок пока нет
- Matrix Theory, Math6304 Lecture Notes From November 27, 2012Документ5 страницMatrix Theory, Math6304 Lecture Notes From November 27, 2012NikhilSharmaОценок пока нет
- AMS526: Numerical Analysis I (Numerical Linear Algebra) : Lecture 08: Floating Point Arithmetic Condition NumbersДокумент14 страницAMS526: Numerical Analysis I (Numerical Linear Algebra) : Lecture 08: Floating Point Arithmetic Condition NumbersNikhilSharmaОценок пока нет
- MAS 305 Algebraic Structures II: Notes 5 Autumn 2006Документ7 страницMAS 305 Algebraic Structures II: Notes 5 Autumn 2006NikhilSharmaОценок пока нет
- 4 Planes and Lines - Examples and ExercisesДокумент21 страница4 Planes and Lines - Examples and ExercisesNikhilSharmaОценок пока нет
- G213 J97 Admit CardДокумент1 страницаG213 J97 Admit CardNikhilSharmaОценок пока нет
- Duration: Three Hours Maximum Marks:100: Ma:MathematicsДокумент14 страницDuration: Three Hours Maximum Marks:100: Ma:MathematicsNikhilSharmaОценок пока нет
- MA Calculus of Variations Integral EquationsДокумент6 страницMA Calculus of Variations Integral EquationsTilakRajCОценок пока нет
- MA Ordinary Differential EquationsДокумент11 страницMA Ordinary Differential EquationsNikhilSharmaОценок пока нет
- Graph TheoryДокумент105 страницGraph Theoryrajamannar322Оценок пока нет
- Nodia and Company: Gate Solved Paper Mathematics AlgebraДокумент9 страницNodia and Company: Gate Solved Paper Mathematics AlgebraNikhilSharmaОценок пока нет
- MA Numerical AnalysisДокумент10 страницMA Numerical AnalysisNikhilSharmaОценок пока нет
- MA Complex-Analysis PDFДокумент10 страницMA Complex-Analysis PDFNikhilSharmaОценок пока нет
- MA Real AnalysisДокумент14 страницMA Real AnalysisNikhilSharmaОценок пока нет
- MA Linear ProgrammingДокумент9 страницMA Linear ProgrammingNikhilSharmaОценок пока нет
- Differntial 1Документ101 страницаDifferntial 1NikhilSharmaОценок пока нет
- Continuity and Uniform ContinuityДокумент8 страницContinuity and Uniform ContinuityJordan TanОценок пока нет
- Balancing The Equation - Chemical Reactions and Equation - Everonn - CBSE Class 10th Course and NCERT SolutionsДокумент2 страницыBalancing The Equation - Chemical Reactions and Equation - Everonn - CBSE Class 10th Course and NCERT SolutionsNikhilSharmaОценок пока нет
- Linear Equations in Two VariablesДокумент3 страницыLinear Equations in Two VariablesNikhilSharmaОценок пока нет
- Poisson TextДокумент9 страницPoisson TextNikhilSharmaОценок пока нет
- Mirror Images and Water Image ProblemsДокумент19 страницMirror Images and Water Image ProblemsNikhilSharma67% (3)
- Quadratic FormsДокумент4 страницыQuadratic FormsNikhilSharmaОценок пока нет
- Computing With Words 2009Документ28 страницComputing With Words 2009NikhilSharmaОценок пока нет
- Geometric Group Theory, and IntroductionДокумент231 страницаGeometric Group Theory, and IntroductionDiego Carvajal100% (3)
- Thermostat White RogersДокумент12 страницThermostat White RogersKin 2009Оценок пока нет
- Single Phase Induction MotorДокумент24 страницыSingle Phase Induction MotorKh Muhammad MashoodОценок пока нет
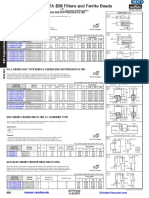
- Ds - 6 Series Disc Type Emifil® Leaded Emi Suppression Filter: All Prices in EuroДокумент1 страницаDs - 6 Series Disc Type Emifil® Leaded Emi Suppression Filter: All Prices in EuroОлег КостадиновОценок пока нет
- Measurement of Insulation Resistance (IR) - Part 2 - EEP PDFДокумент16 страницMeasurement of Insulation Resistance (IR) - Part 2 - EEP PDFHeri SulaimanОценок пока нет
- RESISTANCEДокумент9 страницRESISTANCERohit SahuОценок пока нет
- On The Electrodynamics of Spinning Magnets PDFДокумент5 страницOn The Electrodynamics of Spinning Magnets PDFMenelao ZubiriОценок пока нет
- Product Data Sheet: Circuit Breaker Compact NS100N - TMD - 100 A - 1 Pole 1dДокумент2 страницыProduct Data Sheet: Circuit Breaker Compact NS100N - TMD - 100 A - 1 Pole 1dEmily PhillipsОценок пока нет
- Application of P-N Junction DiodeДокумент3 страницыApplication of P-N Junction Diodevirendra.aryaОценок пока нет
- Eview Nnovations November 2021 Ce Board Exam RENDON 2 (Hydraulics)Документ3 страницыEview Nnovations November 2021 Ce Board Exam RENDON 2 (Hydraulics)Fleight VandollinОценок пока нет
- Value of G at Different Locations On EarthДокумент4 страницыValue of G at Different Locations On EarthDannyRaoОценок пока нет
- Indo Asian Retail Price List 2019Документ32 страницыIndo Asian Retail Price List 2019vinay kumarОценок пока нет
- High Voltage & Power System ProtectionДокумент17 страницHigh Voltage & Power System ProtectionDipok Chandra PalОценок пока нет
- Kinetic Theory of GasesДокумент22 страницыKinetic Theory of Gasesshan mackОценок пока нет
- Fluid MechanicsДокумент10 страницFluid MechanicsUmar AsimОценок пока нет
- Jep Specific WeightДокумент2 страницыJep Specific Weightjep castanedaОценок пока нет
- Electrical Network Mapping and Consumer Indexing Using GISДокумент6 страницElectrical Network Mapping and Consumer Indexing Using GISjoginder2010Оценок пока нет
- "Fundamentals of College Physics" Third Edition: Dr. Peter J. Nolan, SUNY FarmingdaleДокумент15 страниц"Fundamentals of College Physics" Third Edition: Dr. Peter J. Nolan, SUNY Farmingdalehari prasadОценок пока нет
- L21-22 Hypersonic PropulsionДокумент34 страницыL21-22 Hypersonic PropulsionrajinisivОценок пока нет
- XXДокумент1 страницаXXGetachew TikueОценок пока нет
- Physics Paper - I - Question Paper - PDFДокумент10 страницPhysics Paper - I - Question Paper - PDFvarun jhaОценок пока нет
- 2 Sa 1668Документ2 страницы2 Sa 1668Jejen NurjenalОценок пока нет
- Joslyn VerSaVacДокумент4 страницыJoslyn VerSaVacamolinamerino3365Оценок пока нет
- Manual Mantenimiento Grúa PórticoДокумент38 страницManual Mantenimiento Grúa PórticoOSCAR DAGA CARAVANTESОценок пока нет
- Dielectric Withstanding Voltage Test AN-115: AN-115 Application Note v0418Документ4 страницыDielectric Withstanding Voltage Test AN-115: AN-115 Application Note v0418Galarce OrlandoОценок пока нет
- HER101 THRU HER108: Chenyi ElectronicsДокумент3 страницыHER101 THRU HER108: Chenyi Electronicsbugy costyОценок пока нет
- Spar PartДокумент5 страницSpar PartMed Lemine Sidi BadiОценок пока нет
- Page K35-K36 - Pressure ControlsДокумент2 страницыPage K35-K36 - Pressure Controlshon choong chongОценок пока нет
- Water Treatment Plant and Pumping Station Dehumidifier SizingДокумент4 страницыWater Treatment Plant and Pumping Station Dehumidifier SizingViệt Đặng XuânОценок пока нет
- KapilДокумент69 страницKapilPraveen SrivastavaОценок пока нет
- Specimen MS - Paper 1 Edexcel Physics As-LevelДокумент12 страницSpecimen MS - Paper 1 Edexcel Physics As-Levelravin8rajapaksaОценок пока нет