Вам также может понравиться
- Atmel AVR Architecture Shaharyar MahmoodДокумент42 страницыAtmel AVR Architecture Shaharyar MahmoodchusmanullahОценок пока нет
- Ch01 - How Hardware and Software Works TogetherДокумент49 страницCh01 - How Hardware and Software Works TogetherKaussallia JaneОценок пока нет
- (2019-CPE-28) MP Assignment 2Документ14 страниц(2019-CPE-28) MP Assignment 2Nitasha HumaОценок пока нет
- Product - Users - Manual - IFC-CP04Документ21 страницаProduct - Users - Manual - IFC-CP04Md.Rafiqul Islam RonyОценок пока нет
- ChapterДокумент57 страницChapterMr. S. Gladson Oliver Inf. Tech.Оценок пока нет
- Chapter1 DEK3133Документ67 страницChapter1 DEK3133dgkanade72Оценок пока нет
- EE6008 Notes RejinpaulДокумент234 страницыEE6008 Notes RejinpaulB.S. Mothika sriОценок пока нет
- Eex4436 Assignment 01. 416960756Документ18 страницEex4436 Assignment 01. 416960756RusHan SenavirathnaОценок пока нет
- Xpress: Instruction ManualДокумент15 страницXpress: Instruction ManualIharkorobkoОценок пока нет
- Microcontrollers: Prepared By: Khaled M. WagdyДокумент13 страницMicrocontrollers: Prepared By: Khaled M. WagdyRanjith Ravi100% (1)
- Micro All Notes WithCodeSem2Документ70 страницMicro All Notes WithCodeSem2Katia KisswaniОценок пока нет
- Ozkan2004 Ultrasonic MaooДокумент31 страницаOzkan2004 Ultrasonic MaooDoan Thanh ThienОценок пока нет
- 2019-CPE-27 Microprocessor Assignment No 2Документ16 страниц2019-CPE-27 Microprocessor Assignment No 2Haalim MОценок пока нет
- Getting Started With PicsДокумент25 страницGetting Started With Picsarif334Оценок пока нет
- Getting Started With PicsДокумент25 страницGetting Started With PicsHelder OliveiraОценок пока нет
- PIC 16f877a Memory OrganizationДокумент33 страницыPIC 16f877a Memory OrganizationTarek BarhoumОценок пока нет
- Ch1-Introduction To MicrocontrollerДокумент4 страницыCh1-Introduction To MicrocontrollerAbhilasha MathurОценок пока нет
- Instrumentation Chapter 11Документ29 страницInstrumentation Chapter 11Regine OmboyОценок пока нет
- Unit 3 Micro Controllers: Intel 8051: RV College of EngineeringДокумент28 страницUnit 3 Micro Controllers: Intel 8051: RV College of EngineeringRiya Shetty B HОценок пока нет
- Lecture 1Документ18 страницLecture 1cecilio barríaОценок пока нет
- Introduction To I/O: American Internaional University - BangladeshДокумент16 страницIntroduction To I/O: American Internaional University - BangladeshTawhid KhondakarОценок пока нет
- Microprocessors and Programming: Fall: 2021Документ23 страницыMicroprocessors and Programming: Fall: 2021Emirhan AlmaОценок пока нет
- FinalReport MoxДокумент21 страницаFinalReport MoxPhilipp SellinОценок пока нет
- Laboratory3 ECIДокумент12 страницLaboratory3 ECIfa20-bce-046Оценок пока нет
- Pic Based LockДокумент5 страницPic Based LockamshahidОценок пока нет
- Microcontroller Compete Course PDFДокумент106 страницMicrocontroller Compete Course PDFRidaОценок пока нет
- C1 Computer InterfacingДокумент95 страницC1 Computer Interfacingbatrung2906Оценок пока нет
- I/O Management in OSДокумент57 страницI/O Management in OSMohan DugganabionaОценок пока нет
- ISP ICP 2 in 1 ProgrammerДокумент3 страницыISP ICP 2 in 1 ProgrammerCharu SrivastavaОценок пока нет
- COA Lecture 23 Interupt Driven Io PDFДокумент15 страницCOA Lecture 23 Interupt Driven Io PDFA3 AashuОценок пока нет
- Introduction To MicrocontrollersДокумент3 страницыIntroduction To MicrocontrollersRohit BaranwalОценок пока нет
- Pic Microcontroller - Class NotesДокумент26 страницPic Microcontroller - Class NotesNarasimha Murthy Yayavaram80% (25)
- Microcontrollers and ApplicationsДокумент254 страницыMicrocontrollers and ApplicationsArivukkarasan RajaОценок пока нет
- IO OpeartionsДокумент19 страницIO OpeartionsMuthukumar ManickamОценок пока нет
- Multi PLC Workbench Scientech 2482Документ6 страницMulti PLC Workbench Scientech 2482Nikhil ShahОценок пока нет
- Input Output9 6 2021Документ53 страницыInput Output9 6 2021zkd9n8f6kfОценок пока нет
- An2502 PDFДокумент56 страницAn2502 PDFSimon SimonОценок пока нет
- Embedded BeginnerДокумент1 страницаEmbedded BeginnerDivyansh GuptaОценок пока нет
- Technical Jurnal For Engineering ProjectДокумент7 страницTechnical Jurnal For Engineering ProjectAshGhanesenОценок пока нет
- MPS - Ch01 - Introduction To AVR MCUДокумент21 страницаMPS - Ch01 - Introduction To AVR MCUPhương Nghi LiênОценок пока нет
- Arduino 1Документ150 страницArduino 1natashathania06Оценок пока нет
- Computer Organization and ArchitecturesДокумент6 страницComputer Organization and ArchitecturesKuldeep Sai KancharlaОценок пока нет
- Computer Organization and ArchitecturesДокумент6 страницComputer Organization and ArchitecturesKuldeep Sai KancharlaОценок пока нет
- Unit Iii The Microchip Pic Micro (R) Microcontroller 1.types of Microcontroller PIC MicrocontrollerДокумент7 страницUnit Iii The Microchip Pic Micro (R) Microcontroller 1.types of Microcontroller PIC MicrocontrollerAshwin Prabhu .M VISTASОценок пока нет
- Developing A Pic Based ProgramДокумент22 страницыDeveloping A Pic Based ProgramJonathan Jaeger100% (1)
- Computer Organization: Prepared by Asst. Prof. Sherin Thomas ECE Dept. MBITS, NellimattamДокумент67 страницComputer Organization: Prepared by Asst. Prof. Sherin Thomas ECE Dept. MBITS, Nellimattamjinto0007Оценок пока нет
- Android SCADAДокумент122 страницыAndroid SCADAarunraja98Оценок пока нет
- Session - 39 - Programmed Interrupt Driven IOДокумент17 страницSession - 39 - Programmed Interrupt Driven IOmohammedsaniyaamrinОценок пока нет
- Introduction To Embedded Systems: Melaku MДокумент150 страницIntroduction To Embedded Systems: Melaku MTalemaОценок пока нет
- Real Time Embedded Systems Lab ManualДокумент51 страницаReal Time Embedded Systems Lab ManualHamid SaeedОценок пока нет
- Vision de Alto Nivel Del Computador V5 PDFДокумент52 страницыVision de Alto Nivel Del Computador V5 PDFGARY DAVID TRUJILLO MOTATO100% (1)
- Software Analysis in Codewarrior For Mcu: Basic ConceptsДокумент34 страницыSoftware Analysis in Codewarrior For Mcu: Basic ConceptsnnmsdsdОценок пока нет
- Chpt9a Supporting IO DevicesДокумент19 страницChpt9a Supporting IO DevicesPradeep TiwariОценок пока нет
- Parallel Port InterfacingДокумент10 страницParallel Port InterfacingLouieBenAbayaОценок пока нет
- Amc Unit-2Документ133 страницыAmc Unit-2Sasi BhushanОценок пока нет
- Pyq Mu - Electrical Sem6Документ10 страницPyq Mu - Electrical Sem6MOTILAL SUTHAR215291Оценок пока нет
- CTMT Chap 05. IOДокумент15 страницCTMT Chap 05. IOTrần Đình Minh KhoaОценок пока нет
- 1intern Report of Khuc Thanh TruongДокумент40 страниц1intern Report of Khuc Thanh TruongThành TrườngОценок пока нет
- Analog-to-Digital ConverterДокумент21 страницаAnalog-to-Digital ConverterThành TrườngОценок пока нет
- Programming Microcontrollers in C PDFДокумент26 страницProgramming Microcontrollers in C PDFThành TrườngОценок пока нет
- Serial Communication Interface PDFДокумент15 страницSerial Communication Interface PDFThành TrườngОценок пока нет
- Microcomputer Architecture PDFДокумент15 страницMicrocomputer Architecture PDFThành TrườngОценок пока нет
- HW Chapter 1 PDFДокумент3 страницыHW Chapter 1 PDFThành TrườngОценок пока нет
- Assembly Language Programming 01 PDFДокумент15 страницAssembly Language Programming 01 PDFThành TrườngОценок пока нет
- Serial Communication Interface PDFДокумент15 страницSerial Communication Interface PDFThành TrườngОценок пока нет
- ECEN321 - Quiz No2 PDFДокумент1 страницаECEN321 - Quiz No2 PDFThành TrườngОценок пока нет
- ECNG 3016 Advanced Digital Electronics: Eneral NformationДокумент10 страницECNG 3016 Advanced Digital Electronics: Eneral NformationMarlon BoucaudОценок пока нет
- Pratical Exam QPДокумент4 страницыPratical Exam QPrajec99Оценок пока нет
- FALLSEM2022-23 BECE102L TH VL2022230102875 Reference Material I 17-09-2022 Shift Registers CountersДокумент28 страницFALLSEM2022-23 BECE102L TH VL2022230102875 Reference Material I 17-09-2022 Shift Registers CountersAakashОценок пока нет
- Training de Pioneer Plasma 6 GeneracinДокумент62 страницыTraining de Pioneer Plasma 6 GeneracinToni Martin SebéОценок пока нет
- Interfacing High-Voltage Applications To Low-Power ControllersДокумент8 страницInterfacing High-Voltage Applications To Low-Power ControllersIr Mathan RajОценок пока нет
- 74LS194 MotorolaДокумент4 страницы74LS194 MotorolawolfstarprojectsОценок пока нет
- RA8835A Simple DS v10 EngДокумент6 страницRA8835A Simple DS v10 Engkonan_heriОценок пока нет
- Starchips Starchips Starchips Starchips: TechnologyДокумент15 страницStarchips Starchips Starchips Starchips: TechnologyXFact0r100% (1)
- 9.shift RegistersДокумент36 страниц9.shift RegistersJagan GNОценок пока нет
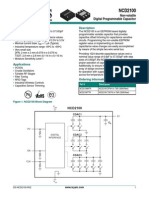
- Features Description: Non-Volatile Digital Programmable CapacitorДокумент20 страницFeatures Description: Non-Volatile Digital Programmable Capacitorjai_mann-1Оценок пока нет
- 7400 SeriesДокумент16 страниц7400 Seriespeeyush_tapadiyaОценок пока нет
- Ic Ecad Lab Manual Online PanoramaДокумент72 страницыIc Ecad Lab Manual Online PanoramaChaitanya Chakka100% (3)
- NEY VULCAN Instruction ManualДокумент48 страницNEY VULCAN Instruction ManualAlfredo MarcanoОценок пока нет
- ELTR145 Sec2Документ105 страницELTR145 Sec2Midori HiroshiОценок пока нет
- CountersДокумент15 страницCountersNGOUNEОценок пока нет
- 4000 Series Ic's ListДокумент4 страницы4000 Series Ic's ListSyed Zulqadar HassanОценок пока нет
- Tle 62326 Low Side SwitchДокумент19 страницTle 62326 Low Side SwitchDiego Caceres100% (1)
- DPSD Model Question Bank With AnswersДокумент7 страницDPSD Model Question Bank With AnswersAkash SanjeevОценок пока нет
- DCF Lab Question 9Документ5 страницDCF Lab Question 9Kunal N JainОценок пока нет
- Tutorial On Logic Analyzer BasicsДокумент5 страницTutorial On Logic Analyzer BasicsGil HaleОценок пока нет
- mm145453MM145453 Liquid Crystal Display DriverДокумент13 страницmm145453MM145453 Liquid Crystal Display Driverh_878236333Оценок пока нет
- Laboratory 2 Hall-Effect Sensors: ME 104 Sensors and Actuators Fall 2003Документ13 страницLaboratory 2 Hall-Effect Sensors: ME 104 Sensors and Actuators Fall 2003Jalaj JainОценок пока нет
- Shift RegisterДокумент25 страницShift RegisterkumarisudhakarОценок пока нет
- MCQ-Flip FlopДокумент11 страницMCQ-Flip Flop01ABHIGYAN MAJIОценок пока нет
- Cao-Notess by Girdhar Gopal Gautam 3gДокумент130 страницCao-Notess by Girdhar Gopal Gautam 3gGirdhar Gopal GautamОценок пока нет
- MC14499 DatasheetДокумент8 страницMC14499 DatasheetTedyS1959Оценок пока нет
- Shift RegisterДокумент21 страницаShift RegisterPurva ChaudhariОценок пока нет
- DM 3400-01 3600-01 DSM Rev DДокумент392 страницыDM 3400-01 3600-01 DSM Rev DtzimistigrisОценок пока нет
- 74HC195Документ10 страниц74HC195MUHAMMAD SISWANTOROОценок пока нет