Вам также может понравиться
- Computer Organization & Architecture: Cache MemoryДокумент71 страницаComputer Organization & Architecture: Cache Memorybree789Оценок пока нет
- William Stallings Computer Organization and Architecture 7 Edition Computer Evolution and PerformanceДокумент42 страницыWilliam Stallings Computer Organization and Architecture 7 Edition Computer Evolution and Performancebree789Оценок пока нет
- 05 Internal MemoryДокумент73 страницы05 Internal Memorybree789Оценок пока нет
- 03 - Top Level View of Computer Function and InterconnectionДокумент64 страницы03 - Top Level View of Computer Function and Interconnectionbree789Оценок пока нет
- William Stallings Computer Organization and Architecture 8 EditionДокумент18 страницWilliam Stallings Computer Organization and Architecture 8 Editionbree789Оценок пока нет
- Chapter Five Functions, Arrays, Pointers and Structures Functions: What Is A Function?Документ16 страницChapter Five Functions, Arrays, Pointers and Structures Functions: What Is A Function?bree789Оценок пока нет
- Multistage Transistor AmplifiersДокумент8 страницMultistage Transistor Amplifiersbree789Оценок пока нет
- Chap9 Network TheoremsДокумент43 страницыChap9 Network Theoremsbree789Оценок пока нет
- CIS162AD - C#: If StatementsДокумент38 страницCIS162AD - C#: If Statementsbree789Оценок пока нет
- MKT StructureДокумент21 страницаMKT Structurebree789Оценок пока нет
- 1 Magnetism: Diamagnetism, Paramagnetism, FerromagnetismДокумент1 страница1 Magnetism: Diamagnetism, Paramagnetism, Ferromagnetismbree789Оценок пока нет
- Robot SprayДокумент4 страницыRobot Spraybree789Оценок пока нет
- Pulse Code ModulationДокумент26 страницPulse Code Modulationbree789Оценок пока нет
- Chap5 Series DC CircuitsДокумент60 страницChap5 Series DC Circuitsbree789Оценок пока нет
- Chap10 CapacitorsДокумент22 страницыChap10 Capacitorsbree789Оценок пока нет
- Chap3 ResistanceДокумент40 страницChap3 Resistancebree789Оценок пока нет
- Chap4 Ohms Law Power EnergyДокумент43 страницыChap4 Ohms Law Power Energybree789Оценок пока нет
- Three-Phase AC Machines: Resource 3Документ18 страницThree-Phase AC Machines: Resource 3bree789Оценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Product - Catalogue - Mini - Polon AlfaДокумент19 страницProduct - Catalogue - Mini - Polon AlfaGina VОценок пока нет
- Elevator Line EnglischДокумент12 страницElevator Line EnglischAlex StanciuОценок пока нет
- Eec 245Документ54 страницыEec 245faisal sbennaОценок пока нет
- Dxi 450 Wiring Diagrams Renault Premium PDFДокумент223 страницыDxi 450 Wiring Diagrams Renault Premium PDFvaleriy98% (40)
- QUICLOCДокумент24 страницыQUICLOCTamilSelvanОценок пока нет
- TECHNICAL FehlmannДокумент5 страницTECHNICAL FehlmannSahrul RomadonОценок пока нет
- Ellingsen 1761 PDFДокумент35 страницEllingsen 1761 PDFsalamrefighОценок пока нет
- Taylor PDFДокумент52 страницыTaylor PDFlandagoОценок пока нет
- Laboratory Report Cover SheetДокумент6 страницLaboratory Report Cover SheetPre DatorОценок пока нет
- C&S T-Line Contactors PDFДокумент4 страницыC&S T-Line Contactors PDFthanggimme.phanОценок пока нет
- Triac Mac12nДокумент9 страницTriac Mac12nSIlvano CavalcanteОценок пока нет
- Denon AVR-2113 PDFДокумент222 страницыDenon AVR-2113 PDFboroda2410100% (5)
- E6K WiringДокумент1 страницаE6K Wiringjo_falconОценок пока нет
- 2022 Nissan Pathfinder Brochure enДокумент9 страниц2022 Nissan Pathfinder Brochure enYudyChenОценок пока нет
- GURUJI - Infrared Sensor Using Opamp IC LM324.Epub - Sanet.stДокумент23 страницыGURUJI - Infrared Sensor Using Opamp IC LM324.Epub - Sanet.stJuanОценок пока нет
- Partsbook PTD25Документ87 страницPartsbook PTD25diesmirnovОценок пока нет
- Soal InstrumentationДокумент10 страницSoal InstrumentationGhazi FazaОценок пока нет
- Pneumatic Safety Valves Safety Function: Application TechniqueДокумент22 страницыPneumatic Safety Valves Safety Function: Application TechniqueMarcelo AlvaresОценок пока нет
- Pioneer Sd-533hd5 643hd5Документ206 страницPioneer Sd-533hd5 643hd5raver1213Оценок пока нет
- Power Electronics PSPICE Lab User Manual: An Iso 9001:2008 Certified OrganizationДокумент19 страницPower Electronics PSPICE Lab User Manual: An Iso 9001:2008 Certified Organizationameiyappan5697Оценок пока нет
- Solar TrackerДокумент20 страницSolar Trackerabhishek dharОценок пока нет
- Mapa de Controlo de Acidentes Ou IncidentesДокумент3 страницыMapa de Controlo de Acidentes Ou IncidentesHermenegildo ChissicoОценок пока нет
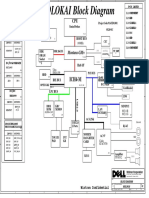
- Schematics Laptop Dell Inspiron 700m 710m Wistron MolokaiДокумент39 страницSchematics Laptop Dell Inspiron 700m 710m Wistron MolokaiFábio DominguesОценок пока нет
- Instruction Manual: Microprocessor-Based Reference Adjuster RA-70Документ55 страницInstruction Manual: Microprocessor-Based Reference Adjuster RA-70luisОценок пока нет
- ServiceInvoice FOCGA83488Документ1 страницаServiceInvoice FOCGA83488Anonymous FKn0IvPОценок пока нет
- Honeywell Magnetic LocksДокумент2 страницыHoneywell Magnetic LocksNotlim MarulandaОценок пока нет
- ECAN-U01S-UserManual EN V1.0Документ17 страницECAN-U01S-UserManual EN V1.0Edson KitaniОценок пока нет
- Space Tower BlumДокумент4 страницыSpace Tower BlumalmirОценок пока нет
- Wabco Brakes General HandbookДокумент20 страницWabco Brakes General HandbookRahul Malhotra100% (3)
- Syska Led Price List RLP Jan 23Документ4 страницыSyska Led Price List RLP Jan 23e98210659fe209100% (1)