Вам также может понравиться
- PWM DC Motor Speed Control Using 555Документ16 страницPWM DC Motor Speed Control Using 555Karthik Dm67% (3)
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosОт EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosРейтинг: 5 из 5 звезд5/5 (1)
- Study of Various ADCs and Compare Their Performance and ParametersДокумент12 страницStudy of Various ADCs and Compare Their Performance and ParametersijaertОценок пока нет
- APB Manual e PDFДокумент105 страницAPB Manual e PDFMiladinm1Оценок пока нет
- LAB 15 Interfacing A Stepper Motor To The 8051Документ3 страницыLAB 15 Interfacing A Stepper Motor To The 8051M Rameez Ur RehmanОценок пока нет
- Lab 7 Interfacing A Stepper Motor To The 8051Документ3 страницыLab 7 Interfacing A Stepper Motor To The 8051Aravind PaulchamyОценок пока нет
- Controlling Stepper Motors With A PIC MicrocontrollerДокумент16 страницControlling Stepper Motors With A PIC Microcontrollervasudeva yasasОценок пока нет
- Unit8-RK 3Документ27 страницUnit8-RK 3sbaОценок пока нет
- Stepper Motor Control Using The PIC16F684Документ12 страницStepper Motor Control Using The PIC16F684edward_conzaОценок пока нет
- Speed Control Using TachometerДокумент14 страницSpeed Control Using TachometerFakhar AbbasОценок пока нет
- Eeeb371 Pic Exp6newДокумент7 страницEeeb371 Pic Exp6newSalemAbaad100% (2)
- Controlling Stepper Motor Using 8051 MicrocontrollerДокумент14 страницControlling Stepper Motor Using 8051 MicrocontrollerAnkush AgarwalОценок пока нет
- Stepper Motor ReportДокумент13 страницStepper Motor ReportVolda0% (2)
- I. Summary The Main Principle of The Project and Its Circuits Is To Rotate The Stepper Motor Step Wise at AДокумент9 страницI. Summary The Main Principle of The Project and Its Circuits Is To Rotate The Stepper Motor Step Wise at ADr. RAMESH KUMAR. SОценок пока нет
- PLC S7 - 300 Applications: Electric Power / ControlsДокумент24 страницыPLC S7 - 300 Applications: Electric Power / ControlsChu Văn ThànhОценок пока нет
- Hobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Документ7 страницHobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Luciana Gutierrez Salazar100% (1)
- Stepper MotorДокумент9 страницStepper MotorHasan Mahmood100% (1)
- Interfacing Stepper Motor Using MicroControllerДокумент4 страницыInterfacing Stepper Motor Using MicroControllershahzad jalbani100% (1)
- DLC LAB - 07 - Student - ManualДокумент6 страницDLC LAB - 07 - Student - Manualrk refatОценок пока нет
- DLC Lab - 07Документ7 страницDLC Lab - 07Didarul Alam AlifОценок пока нет
- Lab 6 ReportДокумент27 страницLab 6 ReportIzzat AzmanОценок пока нет
- Stepper Motor TutorialДокумент6 страницStepper Motor TutorialengrodeОценок пока нет
- 8 Mission MappingДокумент21 страница8 Mission Mappingankit407Оценок пока нет
- m3 DoneДокумент13 страницm3 DoneRasheed KhattakОценок пока нет
- LIC Important QuestionsДокумент5 страницLIC Important QuestionsVigneswaran VigneshОценок пока нет
- An 906 AДокумент16 страницAn 906 AAhmed SialaОценок пока нет
- LAB #9: Stepper Motors: No Late Lab Reports Will Be AcceptedДокумент3 страницыLAB #9: Stepper Motors: No Late Lab Reports Will Be AcceptedAnjan SenguptaОценок пока нет
- Stepper Motor Interfacing With Microcontroller TutorialДокумент15 страницStepper Motor Interfacing With Microcontroller TutorialChakkaravarthiEr100% (1)
- ME 462 - Lab 5 - Stepper Motor Light TrackerДокумент2 страницыME 462 - Lab 5 - Stepper Motor Light TrackerKhabir IslamОценок пока нет
- Electric Motor: Project DescriptionДокумент20 страницElectric Motor: Project DescriptionAllen LeeОценок пока нет
- PLC ExamplesДокумент105 страницPLC Examplestechknow leader50% (2)
- Unit 5Документ30 страницUnit 5kruthikaОценок пока нет
- Electrical-Engineering Engineering Microcontroller Interfacing-And-Applications NotesДокумент27 страницElectrical-Engineering Engineering Microcontroller Interfacing-And-Applications NotesUtkarsh Krishn SG21547Оценок пока нет
- Experiment 7Документ14 страницExperiment 7Mizhar GerardoОценок пока нет
- Mechatronics Question BankДокумент3 страницыMechatronics Question BankPiyasa DasОценок пока нет
- Building Automated Robots: Sagar N & Sanjay R III Year ECEДокумент34 страницыBuilding Automated Robots: Sagar N & Sanjay R III Year ECEviswakshaОценок пока нет
- Washing Machine Control Using 8051 MicrocontrollerДокумент4 страницыWashing Machine Control Using 8051 MicrocontrollerPrasath MurugesanОценок пока нет
- PLC Stepper Motor ControllerДокумент12 страницPLC Stepper Motor ControllerSibtain Ul Hassan100% (1)
- BLDC Motor DriverДокумент6 страницBLDC Motor DriverjpmacabascoОценок пока нет
- Some of The Developments That Have Made To Overcome The Disadvantages of Previously Used Elevators AreДокумент13 страницSome of The Developments That Have Made To Overcome The Disadvantages of Previously Used Elevators AreShubham PatilОценок пока нет
- (212142518) Stepper Motor Control Using MicrocontrollerДокумент4 страницы(212142518) Stepper Motor Control Using MicrocontrollerraghavthakurjiОценок пока нет
- Lab 7 PLC With Stepper MotorДокумент3 страницыLab 7 PLC With Stepper Motorgedeus8072Оценок пока нет
- Stepper Motor - Parallel Port Interface by Jose Rene Flores and Jaime ZavalaДокумент18 страницStepper Motor - Parallel Port Interface by Jose Rene Flores and Jaime ZavalaMufasa SiddiquiОценок пока нет
- Control System Lab ManualДокумент52 страницыControl System Lab ManualMohammad Umar RehmanОценок пока нет
- Tejas DCM Lab 8Документ6 страницTejas DCM Lab 8Piyansh ThukralОценок пока нет
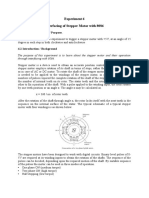
- Experiment 6 Interfacing of Stepper Motor With 8086: 6.1 Aim(s) / Objective(s) / PurposeДокумент4 страницыExperiment 6 Interfacing of Stepper Motor With 8086: 6.1 Aim(s) / Objective(s) / Purposepraveenembd1Оценок пока нет
- Programmable Logic Controller (PLC) : Abhishek SoniДокумент36 страницProgrammable Logic Controller (PLC) : Abhishek SoniAbhishek SoniОценок пока нет
- Ic Lab Planer 8-7-13Документ55 страницIc Lab Planer 8-7-13NaveenkОценок пока нет
- BASIC Stamp I Application Notes: 6: A Serial Stepper ControllerДокумент4 страницыBASIC Stamp I Application Notes: 6: A Serial Stepper ControllerNguyễn HiểnОценок пока нет
- Lab Report G 15-1Документ12 страницLab Report G 15-1Suleiman Abubakar AuduОценок пока нет
- Objectives: Experiment No. 2 Driving Stepper MotorДокумент6 страницObjectives: Experiment No. 2 Driving Stepper MotorakozyОценок пока нет
- Microcontroller Based Stepper Motor Drive For Variable A.C Power SupplyДокумент9 страницMicrocontroller Based Stepper Motor Drive For Variable A.C Power SupplysanabelОценок пока нет
- ECEg6223 Sample Exam PDFДокумент5 страницECEg6223 Sample Exam PDFGenet BekeleОценок пока нет
- Chapter 5 Stepper MOTOR PracticalДокумент16 страницChapter 5 Stepper MOTOR PracticalmfmprofОценок пока нет
- BLDC Motor Control With LPC1700 - AN10898 - NXPДокумент25 страницBLDC Motor Control With LPC1700 - AN10898 - NXPAtakan OzturKОценок пока нет
- KKKL3293 - Sem 1 20212022 - Lab 4 - Stepper MotorДокумент7 страницKKKL3293 - Sem 1 20212022 - Lab 4 - Stepper MotorPRASAATH A/L BALAKRISHNANОценок пока нет
- Lab 3Документ6 страницLab 3Vu LeОценок пока нет
- UntitledДокумент135 страницUntitledcianeto liteОценок пока нет
- 2Документ3 страницы2Rosemary IngramОценок пока нет
- Irctcs E-Ticketing Service Electronic Reservation Slip (Personal User)Документ1 страницаIrctcs E-Ticketing Service Electronic Reservation Slip (Personal User)Yogi TiwariОценок пока нет
- Basic Cover: Benefit Illustration of Reliance Capital Personal LoanДокумент2 страницыBasic Cover: Benefit Illustration of Reliance Capital Personal LoanYogi TiwariОценок пока нет
- Vishal C.VДокумент2 страницыVishal C.VYogi TiwariОценок пока нет
- LIST-vbv1 31 10 2014Документ175 страницLIST-vbv1 31 10 2014Ram VermaОценок пока нет
- Yogesh Top 50 Vc.Документ7 страницYogesh Top 50 Vc.Yogi TiwariОценок пока нет
- Room Heater, ModijaketsДокумент9 страницRoom Heater, ModijaketsYogi TiwariОценок пока нет
- CGL Result 31 10 2013 PDFДокумент3 страницыCGL Result 31 10 2013 PDFYogi TiwariОценок пока нет
- Atmaram TiwariДокумент2 страницыAtmaram TiwariYogi TiwariОценок пока нет
- Atmaram Tiwari CVДокумент3 страницыAtmaram Tiwari CVYogi TiwariОценок пока нет
- Resume For BSS & OMCR Engineer TelecomeДокумент3 страницыResume For BSS & OMCR Engineer TelecomeYogi TiwariОценок пока нет
- Data Scientist Masters Newv1Документ20 страницData Scientist Masters Newv1Shaneej Kumar TiwaryОценок пока нет
- DTMF Based Door Opening System REPORTДокумент20 страницDTMF Based Door Opening System REPORTprashant0% (1)
- FQP20N60/FQPF20N60: General Description Product SummaryДокумент6 страницFQP20N60/FQPF20N60: General Description Product SummaryPablo AllosiaОценок пока нет
- Beginners Guide To Audio ConnectionsДокумент8 страницBeginners Guide To Audio Connectionsstrazvi72Оценок пока нет
- R41B Series DSДокумент21 страницаR41B Series DSEnrique Sanchez (KicKeWoW)Оценок пока нет
- Wind Power Plant Collector System Design - SCRДокумент7 страницWind Power Plant Collector System Design - SCRLuis FebresОценок пока нет
- NPTI FinalДокумент88 страницNPTI Finalchkk.ramakumar100% (1)
- Haier Biomedical Catalog - Vaccine Storage Solution1557741169Документ15 страницHaier Biomedical Catalog - Vaccine Storage Solution1557741169Aiman AliОценок пока нет
- Fisa Tehnica XD5-24PRT-EДокумент136 страницFisa Tehnica XD5-24PRT-EAndronic SergiuОценок пока нет
- Thesis Power Amplifier DesignДокумент8 страницThesis Power Amplifier Designleslylockwoodpasadena100% (2)
- 915 029 0 - Rev E - ACX BT3 - QSGДокумент12 страниц915 029 0 - Rev E - ACX BT3 - QSG30535jОценок пока нет
- Checklist For CCX 6MW Jocil Biomass Power PlantДокумент21 страницаChecklist For CCX 6MW Jocil Biomass Power Plantapi-19973776Оценок пока нет
- Komatsu: Checkout ProcedureДокумент9 страницKomatsu: Checkout ProcedureJose ZorrillaОценок пока нет
- OHM Gate 2022 EE (Questions Paper With Solutions)Документ46 страницOHM Gate 2022 EE (Questions Paper With Solutions)lovely nanduОценок пока нет
- Top 6 Best PCB Printers On Your DeskДокумент13 страницTop 6 Best PCB Printers On Your DeskjackОценок пока нет
- EKC 202ABC ManualДокумент16 страницEKC 202ABC ManualJose CencičОценок пока нет
- Kaise SK-20 22 30 ManualДокумент6 страницKaise SK-20 22 30 ManualAdriano Trigo Lopes50% (2)
- Ultrasonic Wave Production-Piezoelectric MethodДокумент6 страницUltrasonic Wave Production-Piezoelectric MethodNIKHIL SOLOMON P URK19CS1045Оценок пока нет
- T9 Core ID Code As Per VDE Colour Code and DIN Colour CodeДокумент2 страницыT9 Core ID Code As Per VDE Colour Code and DIN Colour CodeMihai BancuОценок пока нет
- The Mesh Method - in Lightning ProtectionДокумент5 страницThe Mesh Method - in Lightning ProtectionSrëëdhär Sriëë100% (1)
- Lecture 1 Introduction To Digital CommunicationsДокумент65 страницLecture 1 Introduction To Digital Communicationscastroverdejoselito25Оценок пока нет
- TIL112Документ2 страницыTIL112Candido GraciaОценок пока нет
- Philips P 817 Service ManualДокумент11 страницPhilips P 817 Service ManualjejejeОценок пока нет
- Aakash CPP - 2Документ43 страницыAakash CPP - 2Rishi Shukla100% (1)
- Industrial Electronics - Module I - Power ElectronicsДокумент35 страницIndustrial Electronics - Module I - Power ElectronicsJazir HameedОценок пока нет
- Site Visit KlatccДокумент25 страницSite Visit KlatccAmir SallehОценок пока нет
- High PassДокумент2 страницыHigh PassMamoon BarbhuyanОценок пока нет
- EEA101L Expt#3 RamosДокумент11 страницEEA101L Expt#3 RamosKhen RamosОценок пока нет
- How To Test Distance Relay 7SA522 PDFДокумент55 страницHow To Test Distance Relay 7SA522 PDFBalaji100% (1)