Вам также может понравиться
- 18 - 09 - 2020 (Jumma Bayan Mohamed H) The Time in Science and Quran - Part 1 Intro: (Start With)Документ5 страниц18 - 09 - 2020 (Jumma Bayan Mohamed H) The Time in Science and Quran - Part 1 Intro: (Start With)Mohamed HОценок пока нет
- 06 - 11 - 2020 (Jumma Bayan Mohamed H) 55: மிக்க (Surah 55:Ar-Rahman) IntroДокумент10 страниц06 - 11 - 2020 (Jumma Bayan Mohamed H) 55: மிக்க (Surah 55:Ar-Rahman) IntroMohamed HОценок пока нет
- Bergey's Manual of Systematic BacteriologyДокумент9 страницBergey's Manual of Systematic BacteriologyMohamed H100% (1)
- Ozone Layer DepletionДокумент17 страницOzone Layer DepletionMohamed HОценок пока нет
- ARCHAEBACTERIAДокумент33 страницыARCHAEBACTERIAMohamed HОценок пока нет
- Rosi Final ModelДокумент1 страницаRosi Final ModelMohamed HОценок пока нет
- Globalwarming PDFДокумент50 страницGlobalwarming PDFParinitha S.KumarОценок пока нет
- Slab Rebar Calculation Beam Rebar Calculation Output Dia Spacing 1004.8 Dia No 16 200 16 4Документ2 страницыSlab Rebar Calculation Beam Rebar Calculation Output Dia Spacing 1004.8 Dia No 16 200 16 4Mohamed HОценок пока нет
- Screen (Hanging From 7') : Fixtures DetailsДокумент1 страницаScreen (Hanging From 7') : Fixtures DetailsMohamed HОценок пока нет
- Study On Usage of Stone Dust and SteelДокумент25 страницStudy On Usage of Stone Dust and SteelMohamed HОценок пока нет
- By வழ கறிஞ சி.ப - சரவண - Published on: 24th September 2018 05:36 PM - அ+ அ அ- -Документ10 страницBy வழ கறிஞ சி.ப - சரவண - Published on: 24th September 2018 05:36 PM - அ+ அ அ- -Mohamed HОценок пока нет
- Vaasi YogaДокумент4 страницыVaasi YogaMohamed H0% (1)
- Indo Aryan MigrationДокумент51 страницаIndo Aryan MigrationMohamed HОценок пока нет
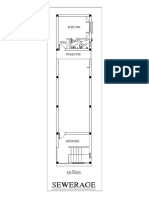
- SewerageДокумент1 страницаSewerageMohamed HОценок пока нет
- AISC - Steel ConstructionДокумент7 страницAISC - Steel ConstructionMohamed HОценок пока нет
- Bronkhorst 2017 WindДокумент21 страницаBronkhorst 2017 WindMohamed HОценок пока нет
- Israeli Occupied TerritoriesДокумент19 страницIsraeli Occupied TerritoriesMohamed H100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Unit 6 - ListeningДокумент11 страницUnit 6 - Listeningtoannv8187Оценок пока нет
- OXE Training - Complete (2011)Документ94 страницыOXE Training - Complete (2011)Dhexter Villa75% (4)
- AEC 34 - ACB Assignment: Module 1: Problem 1-1.TRUE OR FALSEДокумент5 страницAEC 34 - ACB Assignment: Module 1: Problem 1-1.TRUE OR FALSEDrew BanlutaОценок пока нет
- Assembling Your Antenna SystemДокумент27 страницAssembling Your Antenna SystemKam MusОценок пока нет
- Monster Energy v. Jing - Counterfeit OpinionДокумент9 страницMonster Energy v. Jing - Counterfeit OpinionMark JaffeОценок пока нет
- Grade 8 Mock 1Документ11 страницGrade 8 Mock 1yutika GhuwalewalaОценок пока нет
- Check To Make Sure You Have The Most Recent Set of AWS Simple Icons Creating DiagramsДокумент48 страницCheck To Make Sure You Have The Most Recent Set of AWS Simple Icons Creating DiagramsarunchockanОценок пока нет
- MOOT 1 (Principal Sir)Документ3 страницыMOOT 1 (Principal Sir)vaibhav jainОценок пока нет
- Proposal Mini Project SBL LatestДокумент19 страницProposal Mini Project SBL Latestapi-310034018Оценок пока нет
- Website Design Proposal DentistДокумент8 страницWebsite Design Proposal DentistNamanОценок пока нет
- Action Research Intervention in English 9Документ6 страницAction Research Intervention in English 9Rey Kris Joy ApatanОценок пока нет
- CPM Pert Multiple Choice Questions and AnswersДокумент2 страницыCPM Pert Multiple Choice Questions and Answersptarwatkar123Оценок пока нет
- Definition of Surface Texture and Stylus InstrumentДокумент5 страницDefinition of Surface Texture and Stylus InstrumenthosseinОценок пока нет
- IDR PresentationДокумент11 страницIDR Presentationparthesh laheriОценок пока нет
- BE 503 - Week 1 - Analysis 7.18.11Документ6 страницBE 503 - Week 1 - Analysis 7.18.11dwoodburyОценок пока нет
- Annual Premium Statement: Bhupesh GuptaДокумент1 страницаAnnual Premium Statement: Bhupesh GuptaBhupesh GuptaОценок пока нет
- Va797h 15 Q 0019 A00001003Документ35 страницVa797h 15 Q 0019 A00001003Hugo GranadosОценок пока нет
- IOTA Observers Manual All PagesДокумент382 страницыIOTA Observers Manual All PagesMarcelo MartinsОценок пока нет
- Yusof Ishak Secondary School Humanities Study Tour Ho Chi Minh City, VietnamДокумент19 страницYusof Ishak Secondary School Humanities Study Tour Ho Chi Minh City, Vietnamadamant751Оценок пока нет
- BestPractices PDFДокумент14 страницBestPractices PDFAnonymous tChrzngvОценок пока нет
- Chapter 3 Rotation and Revolution NotesДокумент12 страницChapter 3 Rotation and Revolution NotesMERLIN ANTHONYОценок пока нет
- Confirmation 2Документ11 страницConfirmation 2حمزة دراغمةОценок пока нет
- Generic NdaДокумент2 страницыGeneric NdalataminvestmentsОценок пока нет
- 4612 4621 Vitamin D Supplementation For Osteoporosis in Older AdultsДокумент10 страниц4612 4621 Vitamin D Supplementation For Osteoporosis in Older AdultsMohammedОценок пока нет
- Recruitment of Officers in Grade B' (General) - DR - By-2019Документ2 страницыRecruitment of Officers in Grade B' (General) - DR - By-2019Shalom NaikОценок пока нет
- Jibachha's Textbook of Animal Health Volume-IIДокумент16 страницJibachha's Textbook of Animal Health Volume-IIjibachha sahОценок пока нет
- Lagundi/Dangla (Vitex Negundo)Документ2 страницыLagundi/Dangla (Vitex Negundo)Derrick Yson (Mangga Han)Оценок пока нет
- Cell Signaling - The ComponentsДокумент7 страницCell Signaling - The Componentsk10 Lớp Dinh DưỡngОценок пока нет
- Packet Tracer - VLSM Design and Implementation Practice TopologyДокумент3 страницыPacket Tracer - VLSM Design and Implementation Practice TopologyBenj MendozaОценок пока нет
- Battle Group Builder + Commonwealth Infantry Roster - Wargames DesignДокумент12 страницBattle Group Builder + Commonwealth Infantry Roster - Wargames DesignPete PoliОценок пока нет