Вам также может понравиться
- Cranes - Notable Features - RT775Документ1 страницаCranes - Notable Features - RT775lecuellarq85gmailcomОценок пока нет
- PAT Iflex5 Parte003Документ2 страницыPAT Iflex5 Parte003lecuellarq85gmailcomОценок пока нет
- Op Amps37Документ1 страницаOp Amps37lecuellarq85gmailcomОценок пока нет
- PAT Iflex5 Parte005Документ2 страницыPAT Iflex5 Parte005lecuellarq85gmailcomОценок пока нет
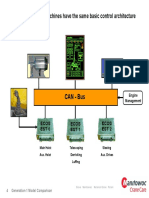
- All Generation 1 Machines Have The Same Basic Control ArchitectureДокумент1 страницаAll Generation 1 Machines Have The Same Basic Control Architecturelecuellarq85gmailcomОценок пока нет
- Notice: Service Manual iFLEX5Документ2 страницыNotice: Service Manual iFLEX5lecuellarq85gmailcomОценок пока нет
- 16.6 Band-Rejection Filter Design: Figure 16-35Документ1 страница16.6 Band-Rejection Filter Design: Figure 16-35lecuellarq85gmailcomОценок пока нет
- 16.5.1.2 Multiple Feedback Topology: Figure 16-34. MFB Band-PassДокумент1 страница16.5.1.2 Multiple Feedback Topology: Figure 16-34. MFB Band-Passlecuellarq85gmailcomОценок пока нет
- Example 16-5. Second-Order MFB Band-Pass Filter With F 1 KHZДокумент1 страницаExample 16-5. Second-Order MFB Band-Pass Filter With F 1 KHZlecuellarq85gmailcomОценок пока нет
- Example 16-6. Fourth-Order Butterworth Band-Pass FilterДокумент1 страницаExample 16-6. Fourth-Order Butterworth Band-Pass Filterlecuellarq85gmailcomОценок пока нет
- Second Filter: Figure 16-21. Second-Order Unity-Gain Sallen-Key Low-Pass FilterДокумент1 страницаSecond Filter: Figure 16-21. Second-Order Unity-Gain Sallen-Key Low-Pass Filterlecuellarq85gmailcomОценок пока нет
- Op Amps36Документ1 страницаOp Amps36lecuellarq85gmailcomОценок пока нет
- F 10 KHZ 1.036 9.653 KHZ F 10 KHZ 1.036 10.36 KHZ: Filter 1: Filter 2Документ1 страницаF 10 KHZ 1.036 9.653 KHZ F 10 KHZ 1.036 10.36 KHZ: Filter 1: Filter 2lecuellarq85gmailcomОценок пока нет
- 16.5.1 Second-Order Band-Pass Filter: A(s) A 1 S 1 S 1 SДокумент1 страница16.5.1 Second-Order Band-Pass Filter: A(s) A 1 S 1 S 1 Slecuellarq85gmailcomОценок пока нет
- A) A DW) A) A DW +: Table 16-2. Values of For Different Filter Types and Different QsДокумент1 страницаA) A DW) A) A DW +: Table 16-2. Values of For Different Filter Types and Different Qslecuellarq85gmailcomОценок пока нет
- 16.4.2.2 Multiple Feedback Topology: Figure 16-29. Second-Order MFB High-Pass FilterДокумент25 страниц16.4.2.2 Multiple Feedback Topology: Figure 16-29. Second-Order MFB High-Pass Filterlecuellarq85gmailcomОценок пока нет
- A C C A 2C C R CC B 2C C R CC: High-Pass Filter DesignДокумент26 страницA C C A 2C C R CC B 2C C R CC: High-Pass Filter Designlecuellarq85gmailcomОценок пока нет
- 16.5.1.1 Sallen-Key TopologyДокумент1 страница16.5.1.1 Sallen-Key Topologylecuellarq85gmailcomОценок пока нет
- Op Amps27Документ1 страницаOp Amps27lecuellarq85gmailcomОценок пока нет
- Figure 16-24. Developing The Gain Response of A High-Pass FilterДокумент21 страницаFigure 16-24. Developing The Gain Response of A High-Pass Filterlecuellarq85gmailcomОценок пока нет
- Figure 16-25. First-Order Noninverting High-Pass FilterДокумент1 страницаFigure 16-25. First-Order Noninverting High-Pass Filterlecuellarq85gmailcomОценок пока нет
- Second Filter: R 1 2 F A C 1 2 10 HZ 0.756 100 10 F 2.105 KДокумент1 страницаSecond Filter: R 1 2 F A C 1 2 10 HZ 0.756 100 10 F 2.105 Klecuellarq85gmailcomОценок пока нет
- Figure 16-13. First-Order Inverting Low-Pass Filter: A(s) 1 1 R C S A(s) 1 R C SДокумент1 страницаFigure 16-13. First-Order Inverting Low-Pass Filter: A(s) 1 1 R C S A(s) 1 R C Slecuellarq85gmailcomОценок пока нет
- A(s) A 1 RC 3 A S (RC) S A 1 R R: Figure 16-18. Adjustable Second-Order Low-Pass FilterДокумент1 страницаA(s) A 1 RC 3 A S (RC) S A 1 R R: Figure 16-18. Adjustable Second-Order Low-Pass Filterlecuellarq85gmailcomОценок пока нет
- 16.4 High-Pass Filter Design: Figure 16-22. Fifth-Order Unity-Gain Butterworth Low-Pass FilterДокумент1 страница16.4 High-Pass Filter Design: Figure 16-22. Fifth-Order Unity-Gain Butterworth Low-Pass Filterlecuellarq85gmailcomОценок пока нет
- C C 4b A: Example 16-2. Second-Order Unity-Gain Tschebyscheff Low-Pass FilterДокумент1 страницаC C 4b A: Example 16-2. Second-Order Unity-Gain Tschebyscheff Low-Pass Filterlecuellarq85gmailcomОценок пока нет
- 1st Order: Figure 16-11. Cascading Filter Stages For Higher-Order FiltersДокумент1 страница1st Order: Figure 16-11. Cascading Filter Stages For Higher-Order Filterslecuellarq85gmailcomОценок пока нет
- Figure 16-15. General Sallen-Key Low-Pass Filter: A(s) A 1 C R R 1 A R C S R R C C SДокумент1 страницаFigure 16-15. General Sallen-Key Low-Pass Filter: A(s) A 1 C R R 1 A R C S R R C C Slecuellarq85gmailcomОценок пока нет
- Op Amps13 PDFДокумент1 страницаOp Amps13 PDFlecuellarq85gmailcomОценок пока нет
- 16.3 Low-Pass Filter Design: A (S) A 1 A S B SДокумент1 страница16.3 Low-Pass Filter Design: A (S) A 1 A S B Slecuellarq85gmailcomОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- How To Design IIR FilterДокумент11 страницHow To Design IIR FilterJignesh PrajapatiОценок пока нет
- Pengenalan FIlter AktifДокумент19 страницPengenalan FIlter Aktifade yulianiОценок пока нет
- Microchip Active Filter DesignДокумент82 страницыMicrochip Active Filter Designpewwe4nwОценок пока нет
- Exp 2 Passive LP and HP FiltersДокумент12 страницExp 2 Passive LP and HP FiltersvallikannuОценок пока нет
- FirДокумент4 страницыFirAhmed HussainОценок пока нет
- EC6502-Principal of Digital Signal Processing - 2013 - Regulation PDFДокумент13 страницEC6502-Principal of Digital Signal Processing - 2013 - Regulation PDFSuba Sara SubaОценок пока нет
- Lab: DSP: Practical ManualДокумент53 страницыLab: DSP: Practical Manualkishorekrishnan20021342Оценок пока нет
- Step by Step Procedure HFSSДокумент23 страницыStep by Step Procedure HFSSNilabja SahaОценок пока нет
- Class Notes - Components of Numerical Relay & Anti-Aliasing FilterДокумент8 страницClass Notes - Components of Numerical Relay & Anti-Aliasing FilterbiswajitsahooОценок пока нет
- Adobe Scan Nov 30, 2022Документ5 страницAdobe Scan Nov 30, 2022Mohit soniОценок пока нет
- Filters Active Passive N Switched CapacitorДокумент24 страницыFilters Active Passive N Switched Capacitorgotti45Оценок пока нет
- Elec9123 DSP DesignДокумент7 страницElec9123 DSP DesignSydney FinestОценок пока нет
- DIP Lecture 07Документ31 страницаDIP Lecture 07sanjila parvinОценок пока нет
- Approximation of FIR by IIR Digital FiltersДокумент11 страницApproximation of FIR by IIR Digital FiltersKirti Deo MishraОценок пока нет
- Salsabila F.N. - TT4D - Tugas 4Документ50 страницSalsabila F.N. - TT4D - Tugas 4SalsabilafnОценок пока нет
- Novel Designs For Elliptic Bandstop FiltersДокумент2 страницыNovel Designs For Elliptic Bandstop FiltersfahkingmoronОценок пока нет
- En-55022 Class B LimitsДокумент21 страницаEn-55022 Class B LimitsBoby SharifОценок пока нет
- Digital Signal Processing: Labno9Документ8 страницDigital Signal Processing: Labno9Muhammad hamza awanОценок пока нет
- The Features of Series ResonanceДокумент28 страницThe Features of Series ResonanceGabriel Carl AlpuertoОценок пока нет
- Active Filter Cookbook: Don Lancaster'sДокумент240 страницActive Filter Cookbook: Don Lancaster'sclaudio lopesОценок пока нет
- Simulation of A 2.5 GHZ Using Qucs A Tutorial By: Low-Pass Filter With A Maximally Flat ResponseДокумент17 страницSimulation of A 2.5 GHZ Using Qucs A Tutorial By: Low-Pass Filter With A Maximally Flat ResponseM.SadatОценок пока нет
- Ch3 Basic RL and RC Circuits: Engineering Circuit AnalysisДокумент24 страницыCh3 Basic RL and RC Circuits: Engineering Circuit Analysisqais652002Оценок пока нет
- QMFДокумент3 страницыQMFpuppyrОценок пока нет
- CNTLДокумент31 страницаCNTLAkanksha DixitОценок пока нет
- Active-Filter CookbookДокумент243 страницыActive-Filter CookbookName100% (1)
- Filter DesignДокумент59 страницFilter DesignsameeОценок пока нет
- 5th Order Butterworth Low Pass FilterДокумент14 страниц5th Order Butterworth Low Pass FilterMarcelo do ValleОценок пока нет
- Electric Circuits Fundamentals - FloydДокумент41 страницаElectric Circuits Fundamentals - FloydBenedet TaferyОценок пока нет
- Chapter 17Документ9 страницChapter 17michaelanunag26Оценок пока нет
- Caracteristicas FiltrosДокумент14 страницCaracteristicas FiltrosA. Ontiveros GarcíaОценок пока нет