Вам также может понравиться
- Artificial NNДокумент11 страницArtificial NNkmeghananayakОценок пока нет
- Final Research Paper2Документ6 страницFinal Research Paper2ruchiОценок пока нет
- Artificial Neural Network ( or Simply Neural Network) - Utkarsh KulshresthaДокумент29 страницArtificial Neural Network ( or Simply Neural Network) - Utkarsh KulshresthaN MaheshОценок пока нет
- Artificial Neural NetworksДокумент12 страницArtificial Neural NetworksBhargav Cho ChweetОценок пока нет
- Soft Computing NotesДокумент127 страницSoft Computing Notesavinashabishek001Оценок пока нет
- Artificial Neural NetworksДокумент50 страницArtificial Neural NetworksCherman Babu0% (1)
- Documenttopdf Trial Version, To Remove This Mark, Please Register This SoftwareДокумент11 страницDocumenttopdf Trial Version, To Remove This Mark, Please Register This Softwareranga247Оценок пока нет
- HCL Shiv VlsiДокумент12 страницHCL Shiv VlsiRavi Teja MutyalaОценок пока нет
- Neural Networks Neural NetworksДокумент22 страницыNeural Networks Neural NetworksIbrahim IsleemОценок пока нет
- RapidДокумент5 страницRapidsandyОценок пока нет
- ANN Modeling the Human BrainДокумент18 страницANN Modeling the Human BrainmonishaОценок пока нет
- Artificial Neural Networks: Department of Computer Science and Information Technology University of AJ&K MuzaffarabadДокумент15 страницArtificial Neural Networks: Department of Computer Science and Information Technology University of AJ&K MuzaffarabadIshtiaq bhatti Ishtiaq bhattiОценок пока нет
- Artificial Neural Network A StudyДокумент6 страницArtificial Neural Network A StudyJulia MartinОценок пока нет
- Artificial Neural Networ (ANN)Документ6 страницArtificial Neural Networ (ANN)vidia adenisaОценок пока нет
- Unit-I Introduction and ANN StructureДокумент15 страницUnit-I Introduction and ANN StructurebhavyaОценок пока нет
- ANN Seminar TopicДокумент27 страницANN Seminar TopicJajula YashwanthdattaОценок пока нет
- Artificial Neural NetworkДокумент22 страницыArtificial Neural NetworkNaveen KambojОценок пока нет
- Ijser: Artificial Neural NetworkДокумент6 страницIjser: Artificial Neural NetworkShashi KumarОценок пока нет
- Introduction to Neural Networks: How Biological Neurons Work and Artificial Neural Networks Are ProgrammedДокумент6 страницIntroduction to Neural Networks: How Biological Neurons Work and Artificial Neural Networks Are Programmedsumathi gnanasekaranОценок пока нет
- ML - Chapter 5 - Neural NetworkДокумент64 страницыML - Chapter 5 - Neural NetworkYohannes DerejeОценок пока нет
- Background:: Artificial Neural NetworkДокумент22 страницыBackground:: Artificial Neural Networkapi-3746880100% (1)
- Neural Networks and Fuzzy Logic SystemsДокумент34 страницыNeural Networks and Fuzzy Logic SystemsBaba DonОценок пока нет
- 1 - IntroductionДокумент34 страницы1 - IntroductionRaj SahaОценок пока нет
- Vlsi For Neural Networks and Their ApplicationsДокумент12 страницVlsi For Neural Networks and Their ApplicationsvinaysuperlionОценок пока нет
- Unit 3Документ62 страницыUnit 3Rishika ShrivastavaОценок пока нет
- SC Unit IIДокумент64 страницыSC Unit IIpawarpravin06Оценок пока нет
- Artificial Neural Networks and Its ApplicationsДокумент1 страницаArtificial Neural Networks and Its ApplicationsDrishti AnandОценок пока нет
- Neuromorphic circuits for autonomous cognitive systemsДокумент19 страницNeuromorphic circuits for autonomous cognitive systemsHussain Bin AliОценок пока нет
- Unit 2ANNsДокумент169 страницUnit 2ANNsbusinessaccanurag2Оценок пока нет
- UNIT1Документ17 страницUNIT1oljiraaОценок пока нет
- Basic Study of Artificial Neural NetworksДокумент5 страницBasic Study of Artificial Neural NetworksManoj AgrawalОценок пока нет
- Unit 5Документ25 страницUnit 5mrnoob9943Оценок пока нет
- Artificial Neural Networks: A Brief IntroductionДокумент8 страницArtificial Neural Networks: A Brief Introductiongk9441088258Оценок пока нет
- Diorio 2003Документ7 страницDiorio 2003diliplokande46Оценок пока нет
- Artificial Neural Network (CS1545) 3 CR: Name of Subject Incharge: Mr. Sanjoy GhatakДокумент16 страницArtificial Neural Network (CS1545) 3 CR: Name of Subject Incharge: Mr. Sanjoy GhatakMehlakОценок пока нет
- Unit 2 Feed Forward Neural Network: Lakshmibala - CHДокумент37 страницUnit 2 Feed Forward Neural Network: Lakshmibala - CHSrie Teja N150232Оценок пока нет
- What Is Artificial Neural Network?Документ6 страницWhat Is Artificial Neural Network?HimanshuОценок пока нет
- Biological Neuron:: What Is ANN?Документ4 страницыBiological Neuron:: What Is ANN?shrilaxmi bhatОценок пока нет
- Lecture 2.1.5 Based On LearningДокумент7 страницLecture 2.1.5 Based On LearningMuskan GahlawatОценок пока нет
- Unit-1 NNДокумент39 страницUnit-1 NNvarunfernandoОценок пока нет
- Lecture 2.1.9 Comparison of BNN and ANNДокумент5 страницLecture 2.1.9 Comparison of BNN and ANNMuskan GahlawatОценок пока нет
- Artificial Neural Network TutorialДокумент32 страницыArtificial Neural Network Tutorialyou • were • trolledОценок пока нет
- Artificial Neural Network Quick GuideДокумент55 страницArtificial Neural Network Quick GuideJIN KHATRIОценок пока нет
- Artificial Neural NetworksДокумент14 страницArtificial Neural NetworksprashantupadhyeОценок пока нет
- Aditi ReportДокумент3 страницыAditi ReportPriya AgarwalОценок пока нет
- Artifical Intelligence Unit 5Документ15 страницArtifical Intelligence Unit 5KP EDITZОценок пока нет
- Artificial Neu: 27. Artificial Neural Network ModelsДокумент18 страницArtificial Neu: 27. Artificial Neural Network ModelsSomuОценок пока нет
- Neural network basicsДокумент9 страницNeural network basicsvarunОценок пока нет
- Effect of Varying Neurons in The Hidden Layer of Neural Network For Simple Character RecognitionДокумент4 страницыEffect of Varying Neurons in The Hidden Layer of Neural Network For Simple Character RecognitionEditor IJRITCCОценок пока нет
- The SpiNNaker ProjectДокумент14 страницThe SpiNNaker ProjectVeronica MisiedjanОценок пока нет
- Nonlinear, and Parallel Computer (Information-Processing System) - It Has The Capability ToДокумент6 страницNonlinear, and Parallel Computer (Information-Processing System) - It Has The Capability Toİsmail KıyıcıОценок пока нет
- Introduction and Role of Artificial Neural NetworksДокумент3 страницыIntroduction and Role of Artificial Neural NetworksitbendsmusicОценок пока нет
- Artificial Neural NetworkДокумент22 страницыArtificial Neural NetworksigeОценок пока нет
- Mi 2Документ605 страницMi 2Ankith VishnuОценок пока нет
- Artificial-NeuralДокумент7 страницArtificial-NeuralHARSH MALVIYAОценок пока нет
- Artificial Neural Networks: Presented By: Jyothi A Putpak Under The Guidance of Prof. Deepak GhodeДокумент16 страницArtificial Neural Networks: Presented By: Jyothi A Putpak Under The Guidance of Prof. Deepak GhodeShailesh ChothveОценок пока нет
- Easy Neural Networks With FANNДокумент6 страницEasy Neural Networks With FANNRoberto SolanoОценок пока нет
- Artificial Neural Network Lecture 1Документ9 страницArtificial Neural Network Lecture 1Prince GodsplanОценок пока нет
- Bio Inspired Computing: Fundamentals and Applications for Biological Inspiration in the Digital WorldОт EverandBio Inspired Computing: Fundamentals and Applications for Biological Inspiration in the Digital WorldОценок пока нет
- Long Short Term Memory: Fundamentals and Applications for Sequence PredictionОт EverandLong Short Term Memory: Fundamentals and Applications for Sequence PredictionОценок пока нет
- E 905030Документ4 страницыE 905030Tariq ZuhlufОценок пока нет
- PC Interface For The CAN Bus: With New SoftwareДокумент5 страницPC Interface For The CAN Bus: With New SoftwareTariq Zuhluf100% (2)
- Design Ideas: Keyboard CircuitДокумент2 страницыDesign Ideas: Keyboard CircuitTariq Zuhluf100% (3)
- Practical Neural Networks (3) : Part 3 - Feedback Nets and Competitive NetsДокумент5 страницPractical Neural Networks (3) : Part 3 - Feedback Nets and Competitive NetsTariq Zuhluf100% (2)
- In Questof A PangramДокумент5 страницIn Questof A PangramTariq Zuhluf100% (1)
- Seven-Eleven: Ir NVДокумент3 страницыSeven-Eleven: Ir NVTariq Zuhluf100% (2)
- Ensors FOR Humans: Sensor Technology at MITДокумент4 страницыEnsors FOR Humans: Sensor Technology at MITTariq ZuhlufОценок пока нет
- Main voltage monitor provides emergency lighting under 40 charactersДокумент1 страницаMain voltage monitor provides emergency lighting under 40 charactersTariq Zuhluf100% (2)
- E 055077Документ1 страницаE 055077Tariq ZuhlufОценок пока нет
- E 037028Документ1 страницаE 037028Tariq Zuhluf100% (2)
- Slave Mains On-Off Control: Amplificationj Attenuation SelectorДокумент3 страницыSlave Mains On-Off Control: Amplificationj Attenuation SelectorTariq Zuhluf100% (2)
- Noise of The The V /115.: R.rn.sДокумент1 страницаNoise of The The V /115.: R.rn.sTariq Zuhluf100% (1)
- E 01 C 093Документ5 страницE 01 C 093Tariq ZuhlufОценок пока нет
- Psd3Xx Chips: by A. Riet JensДокумент3 страницыPsd3Xx Chips: by A. Riet JensTariq Zuhluf100% (1)
- E 05 B 040Документ7 страницE 05 B 040Tariq Zuhluf100% (2)
- REMOTE CONTROL CIRCUIT BY MOBILE PHONEДокумент4 страницыREMOTE CONTROL CIRCUIT BY MOBILE PHONETariq Zuhluf100% (2)
- Stereo Peak Indicator: Small CircuitscollectionДокумент1 страницаStereo Peak Indicator: Small CircuitscollectionTariq Zuhluf100% (1)
- Universal Power-On Delay: by J. RuffellДокумент1 страницаUniversal Power-On Delay: by J. RuffellTariq Zuhluf100% (2)
- Speed-Up For Darlingtons: Small CircuitscollectionДокумент1 страницаSpeed-Up For Darlingtons: Small CircuitscollectionTariq Zuhluf100% (1)
- Digital Bechtop Power Supply (2) : Part 2: Soldering, Sawing and DrillingДокумент5 страницDigital Bechtop Power Supply (2) : Part 2: Soldering, Sawing and DrillingTariq ZuhlufОценок пока нет
- E 02 CH 43Документ1 страницаE 02 CH 43Tariq Zuhluf100% (2)
- E 02 CH 04Документ1 страницаE 02 CH 04Tariq Zuhluf100% (2)
- Token Number Display: Small CircuitscollectionДокумент1 страницаToken Number Display: Small CircuitscollectionTariq Zuhluf100% (2)
- E 03 B 035Документ1 страницаE 03 B 035Tariq Zuhluf100% (1)
- E051042 PDFДокумент2 страницыE051042 PDFTariq ZuhlufОценок пока нет
- E 986024Документ1 страницаE 986024Tariq Zuhluf100% (1)
- Current Probe: Parts ListДокумент1 страницаCurrent Probe: Parts ListTariq Zuhluf100% (2)
- Measuring current with three external componentsДокумент4 страницыMeasuring current with three external componentsTariq Zuhluf100% (1)
- Wireless Museum: Components ListДокумент1 страницаWireless Museum: Components ListTariq Zuhluf100% (1)
- Idc To Box Header Adaptor: ReferenceДокумент2 страницыIdc To Box Header Adaptor: ReferenceTariq Zuhluf100% (1)
- CS-280E Chain Saw: Parts CatalogДокумент16 страницCS-280E Chain Saw: Parts CatalogГоран СтанишићОценок пока нет
- Distribution A9F74240Документ3 страницыDistribution A9F74240Dani WaskitoОценок пока нет
- 2 Interference in Spur GearsДокумент2 страницы2 Interference in Spur Gearschris100% (1)
- Specification for biodiesel (B100) - ASTM D6751-08Документ1 страницаSpecification for biodiesel (B100) - ASTM D6751-08Alejandra RojasОценок пока нет
- 3 Phase Induction Motors Objective Questions With AnswersДокумент3 страницы3 Phase Induction Motors Objective Questions With AnswersMohan Raj0% (2)
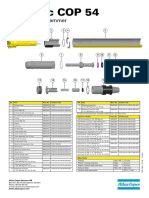
- 9853 1239 01 - COP 54 Service Poster - LOWДокумент1 страница9853 1239 01 - COP 54 Service Poster - LOWValourdos LukasОценок пока нет
- Manage Safety Changes (MOCДокумент5 страницManage Safety Changes (MOCWirawan Adi Setya RОценок пока нет
- FGGДокумент12 страницFGGSridharan VenkatОценок пока нет
- 13 - Principles of Flight - QuestionsДокумент80 страниц13 - Principles of Flight - QuestionsEdgar Muñoz Fernández50% (4)
- Installing RegCM4.3rc Training Session IДокумент11 страницInstalling RegCM4.3rc Training Session Ijmatias765428100% (1)
- Customize ADFS sign-in page brandingДокумент4 страницыCustomize ADFS sign-in page brandingmicu0% (1)
- Hard Disk DriveДокумент4 страницыHard Disk DriveAbhishek AbhiОценок пока нет
- Supercharging: Superchargers & TurbochargersДокумент11 страницSupercharging: Superchargers & TurbochargersAkhil Here100% (1)
- WATCHДокумент9 страницWATCHGANTOROОценок пока нет
- Bbraun Infusomat Service MaualДокумент4 страницыBbraun Infusomat Service Maualalfie frankie diezОценок пока нет
- Quotation 615-4078 BabulalДокумент14 страницQuotation 615-4078 Babulaldevrajan631Оценок пока нет
- Permeability: The Key to ProductionДокумент30 страницPermeability: The Key to ProductionDarshak Sakhreliya100% (1)
- Dewatering SystemДокумент124 страницыDewatering SystemSpyros NannosОценок пока нет
- Galvanize Galvanize Business Unit: Trust Us To GalvanizeДокумент6 страницGalvanize Galvanize Business Unit: Trust Us To GalvanizeAdet WildanОценок пока нет
- An Algorithm For Minimax Solution of Overdetennined Systems of Non-Linear EquationsДокумент8 страницAn Algorithm For Minimax Solution of Overdetennined Systems of Non-Linear EquationsDewi FitriyaniОценок пока нет
- Valvula Selectora Trans.Документ4 страницыValvula Selectora Trans.enriqueОценок пока нет
- TMC 421 PDFДокумент82 страницыTMC 421 PDFJamie MooreОценок пока нет
- Please Note That This Form Details Exploration and Production Api Titles Available For OrderДокумент8 страницPlease Note That This Form Details Exploration and Production Api Titles Available For Orderhaotran68Оценок пока нет
- 5TH Week EnergyДокумент6 страниц5TH Week EnergyMira VeranoОценок пока нет
- SHB 2503-3703 en 1000081433Документ192 страницыSHB 2503-3703 en 1000081433Alberto100% (1)
- Stressman Engineering - Brochure Norway 2018-6Документ8 страницStressman Engineering - Brochure Norway 2018-6FelipeОценок пока нет
- Bottom Ash HopperДокумент8 страницBottom Ash HopperBhargav ChaudhariОценок пока нет
- Fajs FSXДокумент8 страницFajs FSXJunhy Bandeira CassandraОценок пока нет
- Physics Lab ReportДокумент2 страницыPhysics Lab ReportFelix SonsunОценок пока нет
- Assign4 RANSДокумент2 страницыAssign4 RANSankitsaneetОценок пока нет