Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Site Data & Test Report-Node B New SiteДокумент47 страницSite Data & Test Report-Node B New SiteChika AlbertОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Computer Village Pre-Drive Test Report For AIRTEL Network: Date: 30-08-2018Документ39 страницComputer Village Pre-Drive Test Report For AIRTEL Network: Date: 30-08-2018Chika AlbertОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Mathematical Modeling GuideДокумент5 страницMathematical Modeling GuideChika AlbertОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- Case A α AGCH overload at the BTS β: Technology Cases Causes Cause Code Solution CodeДокумент8 страницCase A α AGCH overload at the BTS β: Technology Cases Causes Cause Code Solution CodeChika AlbertОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Cluster Drive Report: Port-Harcourt - ObigboДокумент50 страницCluster Drive Report: Port-Harcourt - ObigboChika AlbertОценок пока нет
- Lg9114 - 2g SSV ReportДокумент24 страницыLg9114 - 2g SSV ReportChika AlbertОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Cluster Drive Report: Port-Harcourt - ObigboДокумент50 страницCluster Drive Report: Port-Harcourt - ObigboChika AlbertОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Cluster Drive Report: Port-Harcourt - ObigboДокумент50 страницCluster Drive Report: Port-Harcourt - ObigboChika AlbertОценок пока нет
- Final R5 Data Report TemplateДокумент43 страницыFinal R5 Data Report TemplateChika AlbertОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- Mobile Handset Cellular NetworkДокумент64 страницыMobile Handset Cellular NetworkSandeep GoyalОценок пока нет
- Table View DataДокумент32 страницыTable View DataChika AlbertОценок пока нет
- The Inexhaustible GodДокумент6 страницThe Inexhaustible GodChika AlbertОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- 2G C11&C26 - 45 Sites - 2.25Документ12 страниц2G C11&C26 - 45 Sites - 2.25Chika AlbertОценок пока нет
- 2G C11&C26 - 45 Sites - 2.25Документ12 страниц2G C11&C26 - 45 Sites - 2.25Chika AlbertОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Months Month Date Residual Min - Te MP Pred - Mi N - Temp LCL - Min - Temp UCL - Min - TempДокумент13 страницMonths Month Date Residual Min - Te MP Pred - Mi N - Temp LCL - Min - Temp UCL - Min - TempChika AlbertОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- MTN Site and Operator Details ReportДокумент18 страницMTN Site and Operator Details ReportChika AlbertОценок пока нет
- Gariki Cluster Pre - Post Report Poor StretchesДокумент14 страницGariki Cluster Pre - Post Report Poor StretchesChika AlbertОценок пока нет
- VA Veterans Health Survey Assesses Genomic Medicine ProgramДокумент11 страницVA Veterans Health Survey Assesses Genomic Medicine Programjawadg123Оценок пока нет
- Abuja Physical Optimization Audit ReportДокумент32 страницыAbuja Physical Optimization Audit ReportChika AlbertОценок пока нет
- Abuja Physical Optimization Audit ReportДокумент32 страницыAbuja Physical Optimization Audit ReportChika AlbertОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Eni Office To Villagio Tss - Los - Summary ReportДокумент13 страницEni Office To Villagio Tss - Los - Summary ReportChika AlbertОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- Eni Office To Md's Residence Tss - Los - Summary ReportДокумент13 страницEni Office To Md's Residence Tss - Los - Summary ReportChika AlbertОценок пока нет
- S/N Site ID Site Address Site Cordinate: No3, Iweanya Ugbogoh Crecent, Lekki Phase1Документ9 страницS/N Site ID Site Address Site Cordinate: No3, Iweanya Ugbogoh Crecent, Lekki Phase1Chika AlbertОценок пока нет
- Eni Office To Md's Residence Tss - Los - Summary ReportДокумент13 страницEni Office To Md's Residence Tss - Los - Summary ReportChika AlbertОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- All Links TSS - LOS - Summary ReportДокумент14 страницAll Links TSS - LOS - Summary ReportChika AlbertОценок пока нет
- PS PS Attach Detach MS1Документ6 страницPS PS Attach Detach MS1Chika AlbertОценок пока нет
- Eni Office To Md's Residence Tss - Los - Summary ReportДокумент13 страницEni Office To Md's Residence Tss - Los - Summary ReportChika AlbertОценок пока нет
- PS PS Attach Detach MS1Документ6 страницPS PS Attach Detach MS1Chika AlbertОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- PS Attach Setup Time (MS)Документ2 страницыPS Attach Setup Time (MS)Chika AlbertОценок пока нет
- LV12 - Drive Shafts - Issue 1Документ19 страницLV12 - Drive Shafts - Issue 1Đức HòangОценок пока нет
- Online Institute Reporting Slip of The Application Number - 200310422837 PDFДокумент1 страницаOnline Institute Reporting Slip of The Application Number - 200310422837 PDFRohith RohanОценок пока нет
- DiodeДокумент22 страницыDiodeSaurabh Mittal100% (1)
- Correlation Study and Regression Analysis of Water Quality Assessment of Nagpur City, IndiaДокумент5 страницCorrelation Study and Regression Analysis of Water Quality Assessment of Nagpur City, IndiaShakeel AhmadОценок пока нет
- Product Design Recommended Reading ListДокумент3 страницыProduct Design Recommended Reading ListSai Prasath100% (1)
- Stokes' theorem simplifies integration of differential formsДокумент6 страницStokes' theorem simplifies integration of differential formssiriusgrОценок пока нет
- Munsell Color Charts and GaugesДокумент2 страницыMunsell Color Charts and GaugesMario DalengkadeОценок пока нет
- Symfony 2 The BookДокумент354 страницыSymfony 2 The BookYamuna ChowdaryОценок пока нет
- DEA R ScriptsДокумент3 страницыDEA R ScriptsFrancisco SilvaОценок пока нет
- Modeling of SO2 Scrubbing in Spray TowersДокумент16 страницModeling of SO2 Scrubbing in Spray Towersrebelde96100% (1)
- Rockaway Beach Branch Community Impact StudyДокумент98 страницRockaway Beach Branch Community Impact StudyHanaRAlbertsОценок пока нет
- Foundation LayoutДокумент1 страницаFoundation LayoutrendaninОценок пока нет
- Lg938l - Operation & Maintenance ManualДокумент114 страницLg938l - Operation & Maintenance ManualMuhammad Nadim MakhlufОценок пока нет
- Modeling of The Effective Thermal Conductivity and Diffusivity of A Packed Bed With Stagnant FluidДокумент9 страницModeling of The Effective Thermal Conductivity and Diffusivity of A Packed Bed With Stagnant Fluidbasura12345Оценок пока нет
- Motorola's TQM Journey to Six Sigma QualityДокумент19 страницMotorola's TQM Journey to Six Sigma QualityKatya Avdieienko100% (1)
- XHLE Long Coupled Centrifugal Pump EnglishДокумент8 страницXHLE Long Coupled Centrifugal Pump Englishgagi1994brahimОценок пока нет
- Wireless Mouse m325 Quick Start GuideДокумент2 страницыWireless Mouse m325 Quick Start GuideFabolos 9Оценок пока нет
- MIMO Channel CapacityДокумент9 страницMIMO Channel CapacityGendyОценок пока нет
- HalideДокумент195 страницHalidejadecolourОценок пока нет
- Timing Chain Tensioner ResetДокумент4 страницыTiming Chain Tensioner ResetHybrid RacingОценок пока нет
- 2022 Manufacture AnswerДокумент8 страниц2022 Manufacture AnswerChampika V SamarasighaОценок пока нет
- SDCK CD Ies 01 (Rev B)Документ125 страницSDCK CD Ies 01 (Rev B)Narada HerathОценок пока нет
- LDX2101 Spec SheetДокумент2 страницыLDX2101 Spec SheetGaurav NarulaОценок пока нет
- YCMOU-6th Semester Question Papers-7Документ5 страницYCMOU-6th Semester Question Papers-7phase_shekhar21Оценок пока нет
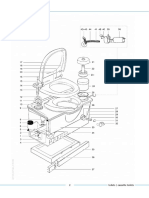
- Cassette toilet spare parts guide for models C2, C3 and C4Документ21 страницаCassette toilet spare parts guide for models C2, C3 and C4georgedragosОценок пока нет
- Linear Slot DiffuserДокумент15 страницLinear Slot DiffuserhyderabadОценок пока нет
- Melter / Applicators: Modern Cracksealing TechnologyДокумент16 страницMelter / Applicators: Modern Cracksealing TechnologyEduardo RazerОценок пока нет
- Essential Roof Truss Design TermsДокумент45 страницEssential Roof Truss Design TermsAnkit SuriОценок пока нет
- JLG Lighting Tower 6308AN Series II 20150907Документ2 страницыJLG Lighting Tower 6308AN Series II 20150907DwiSulistyo09Оценок пока нет
- Calgon Tech SpecДокумент4 страницыCalgon Tech SpecDanStratoОценок пока нет
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormОт EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormРейтинг: 5 из 5 звезд5/5 (5)
- Piping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationОт EverandPiping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationРейтинг: 4 из 5 звезд4/5 (18)
- Trevor Kletz Compendium: His Process Safety Wisdom Updated for a New GenerationОт EverandTrevor Kletz Compendium: His Process Safety Wisdom Updated for a New GenerationОценок пока нет
- Functional Safety from Scratch: A Practical Guide to Process Industry ApplicationsОт EverandFunctional Safety from Scratch: A Practical Guide to Process Industry ApplicationsОценок пока нет