Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
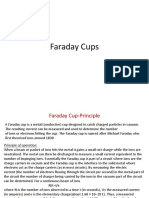
- Faraday CupsДокумент10 страницFaraday CupsAshish SharmaОценок пока нет
- Wall Thickness CalculationДокумент13 страницWall Thickness CalculationTech Monk TamilОценок пока нет
- #### Biophotonics and Coherent Systems in Biology by Beloussov Voeikov Martynyuk 314pДокумент314 страниц#### Biophotonics and Coherent Systems in Biology by Beloussov Voeikov Martynyuk 314pwealth10Оценок пока нет
- Accelerated Corrosion TestДокумент5 страницAccelerated Corrosion TestafqaryОценок пока нет
- Nuclear Engineering Homework Solutions Due 16 February 2006Документ8 страницNuclear Engineering Homework Solutions Due 16 February 2006Snakefistx100% (1)
- Civil Engineering Department: Technological University of The Philippines - ManilaДокумент3 страницыCivil Engineering Department: Technological University of The Philippines - ManilaLmark VerdadОценок пока нет
- TMP - 13675-VERDAD RESUME-1864922034Документ1 страницаTMP - 13675-VERDAD RESUME-1864922034Cecillia F ObejasОценок пока нет
- TMP - 13675-VERDAD RESUME-1864922034Документ1 страницаTMP - 13675-VERDAD RESUME-1864922034Cecillia F ObejasОценок пока нет
- Civil Engineering Department: Technological University of The Philippines - ManilaДокумент3 страницыCivil Engineering Department: Technological University of The Philippines - ManilaLmark VerdadОценок пока нет
- Sonnet 29 116Документ2 страницыSonnet 29 116Lmark VerdadОценок пока нет
- Technological University of The PhilippinesДокумент1 страницаTechnological University of The PhilippinesLmark VerdadОценок пока нет
- Tupces Merchandise FormДокумент18 страницTupces Merchandise FormLmark VerdadОценок пока нет
- Sonnet 29 116Документ2 страницыSonnet 29 116Lmark VerdadОценок пока нет
- On-the-Job Training at Dasmariñas City LibraryДокумент8 страницOn-the-Job Training at Dasmariñas City LibraryLmark VerdadОценок пока нет
- Supplementary ProblemsДокумент5 страницSupplementary ProblemsLmark VerdadОценок пока нет
- Tupces Merchandise FormДокумент18 страницTupces Merchandise FormLmark VerdadОценок пока нет
- Tupces Merchandise FormДокумент18 страницTupces Merchandise FormLmark VerdadОценок пока нет
- Narrative Draft 2Документ31 страницаNarrative Draft 2Lmark VerdadОценок пока нет
- Acctg BasicsДокумент5 страницAcctg BasicsLmark VerdadОценок пока нет
- Sieve AnalysisДокумент1 страницаSieve AnalysisLmark VerdadОценок пока нет
- TMP - 21294-GANTT CHART126070326Документ12 страницTMP - 21294-GANTT CHART126070326Lmark VerdadОценок пока нет
- Front P (AgeДокумент8 страницFront P (AgeLmark VerdadОценок пока нет
- Concrete Materials GuideДокумент6 страницConcrete Materials GuideLmark VerdadОценок пока нет
- TMP - 27167-1.topic Proposals Final210079051Документ4 страницыTMP - 27167-1.topic Proposals Final210079051Lmark VerdadОценок пока нет
- TMP - 27167 COMPILATION 829502532Документ6 страницTMP - 27167 COMPILATION 829502532Lmark VerdadОценок пока нет
- TMP - 27167-Gantt Chart754172597Документ1 страницаTMP - 27167-Gantt Chart754172597Lmark VerdadОценок пока нет
- Narrative Draft 2Документ31 страницаNarrative Draft 2Lmark VerdadОценок пока нет
- ContractsДокумент8 страницContractsLmark VerdadОценок пока нет
- TMP - 27167 COMPILATION 829502532Документ6 страницTMP - 27167 COMPILATION 829502532Lmark VerdadОценок пока нет
- TMP 27167-CONCRETE94903737Документ7 страницTMP 27167-CONCRETE94903737Lmark VerdadОценок пока нет
- Pure and Conditional ObligationДокумент47 страницPure and Conditional ObligationLmark VerdadОценок пока нет
- TMP - 27167-CHAPTER1 RevisedДокумент3 страницыTMP - 27167-CHAPTER1 RevisedLmark VerdadОценок пока нет
- Duties of Debtors and Remedies of CreditorsДокумент17 страницDuties of Debtors and Remedies of CreditorsLmark VerdadОценок пока нет
- Duties of Debtors and Remedies of CreditorsДокумент17 страницDuties of Debtors and Remedies of CreditorsLmark VerdadОценок пока нет
- Low Power-Consumption CO2 Sensor: (Model NO:MG-812)Документ6 страницLow Power-Consumption CO2 Sensor: (Model NO:MG-812)Nguyen Vu Hoang ThachОценок пока нет
- Humidity Control Unit: Hcuc SeriesДокумент2 страницыHumidity Control Unit: Hcuc SeriesRafael RuizОценок пока нет
- Electro ChemistryДокумент5 страницElectro ChemistrySush ReddyОценок пока нет
- Mn-Cu Alloying Improves Mechanical Properties of Ductile IronДокумент7 страницMn-Cu Alloying Improves Mechanical Properties of Ductile IronabhiОценок пока нет
- Lecture 4-9: Bonding in Ceramics and Structure of Ceramics: MM 362 Ceramics and Glasses Spring Semester 2020, FMCE, GIKIДокумент70 страницLecture 4-9: Bonding in Ceramics and Structure of Ceramics: MM 362 Ceramics and Glasses Spring Semester 2020, FMCE, GIKIUsamaОценок пока нет
- Outcome 2 T 1Документ14 страницOutcome 2 T 1R ASTUSОценок пока нет
- IGEM - TD - 1 - Introduction & ScopeДокумент18 страницIGEM - TD - 1 - Introduction & ScopeEnrico ManfrinatoОценок пока нет
- Connecting Rod Material AnalysisДокумент36 страницConnecting Rod Material Analysispramo_dass0% (1)
- Chemical Kinetics Rate LawsДокумент11 страницChemical Kinetics Rate LawsPrasad Alex100% (1)
- High-performance industrial gear oilsДокумент5 страницHigh-performance industrial gear oilsKeshab ShresthaОценок пока нет
- CR - Installation and Operating InstructionsДокумент48 страницCR - Installation and Operating InstructionsHusniОценок пока нет
- Studies On Bound Water in PvaДокумент4 страницыStudies On Bound Water in PvasggdgdОценок пока нет
- CH3 MergerДокумент45 страницCH3 MergerRuthОценок пока нет
- Design of Machine Elements Instruction PlanДокумент8 страницDesign of Machine Elements Instruction Plangurkiratsingh013Оценок пока нет
- Heatexchangers EnglishДокумент2 страницыHeatexchangers EnglishRamanipriya MAHALINGAMОценок пока нет
- QT 16Cr Technical Data SheetДокумент1 страницаQT 16Cr Technical Data SheethafsaОценок пока нет
- Charging Methods for Conductors: Rubbing, Conduction & InductionДокумент18 страницCharging Methods for Conductors: Rubbing, Conduction & InductionLora GarciaОценок пока нет
- Sp2 HybridizationДокумент3 страницыSp2 HybridizationManP13Оценок пока нет
- Motor Size SelectionДокумент4 страницыMotor Size SelectionArnoah RamirezОценок пока нет
- Applsci 12 11268Документ19 страницApplsci 12 11268Yuvaraj muthukrishnanОценок пока нет
- Thermal Expansion in Solids and Liquids: (Item No.: P2310100)Документ8 страницThermal Expansion in Solids and Liquids: (Item No.: P2310100)Shera IeraОценок пока нет
- RooftankДокумент1 страницаRooftankwennycantikОценок пока нет
- The Thermoset Difference: Thermoset vs. Thermoplastic: © 2014 Davies Molding LLCДокумент4 страницыThe Thermoset Difference: Thermoset vs. Thermoplastic: © 2014 Davies Molding LLCshafiraОценок пока нет
- Center of Mass, Momentum, Impulse & CollisionsДокумент8 страницCenter of Mass, Momentum, Impulse & CollisionsRolando Jerome MagoОценок пока нет
- Ionic Bond Formation: General ChemistryДокумент20 страницIonic Bond Formation: General Chemistryyoona stewartОценок пока нет