Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Cognitive-Behavioral Interventions For PTSDДокумент20 страницCognitive-Behavioral Interventions For PTSDBusyMindsОценок пока нет
- Remediation of AlphabetsДокумент34 страницыRemediation of AlphabetsAbdurahmanОценок пока нет
- Cable Schedule - Instrument - Surfin - Malanpur-R0Документ3 страницыCable Schedule - Instrument - Surfin - Malanpur-R0arunpandey1686Оценок пока нет
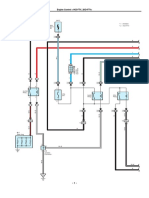
- Diagrama Hilux 1KD-2KD PDFДокумент11 страницDiagrama Hilux 1KD-2KD PDFJeni100% (1)
- OIl Rig Safety ChecklistДокумент10 страницOIl Rig Safety ChecklistTom TaoОценок пока нет
- 1.3.3 1.3.4 1.3.5 Input, Output & Storage Devices Workbook by Inqilab Patel PDFДокумент173 страницы1.3.3 1.3.4 1.3.5 Input, Output & Storage Devices Workbook by Inqilab Patel PDFRayyan MalikОценок пока нет
- IOM - Rampa Hidráulica - Blue GiantДокумент32 страницыIOM - Rampa Hidráulica - Blue GiantPATRICIA HERNANDEZОценок пока нет
- Cot Observation ToolДокумент14 страницCot Observation ToolArnoldBaladjayОценок пока нет
- Nielsen Report - The New Trend Among Indonesia's NetizensДокумент20 страницNielsen Report - The New Trend Among Indonesia's NetizensMarsha ImaniaraОценок пока нет
- Tripura 04092012Документ48 страницTripura 04092012ARTHARSHI GARGОценок пока нет
- Pin Joint en PDFДокумент1 страницаPin Joint en PDFCicОценок пока нет
- Assignment 1 - Vertical Alignment - SolutionsДокумент6 страницAssignment 1 - Vertical Alignment - SolutionsArmando Ramirez100% (1)
- Operation ManagementДокумент4 страницыOperation ManagementHananiya GizawОценок пока нет
- IMS - Integrated Management System Implementation Steps-Sterling - Rev00-240914 PDFДокумент28 страницIMS - Integrated Management System Implementation Steps-Sterling - Rev00-240914 PDFNorman AinomugishaОценок пока нет
- Directorate of Technical Education, Maharashtra State, MumbaiДокумент57 страницDirectorate of Technical Education, Maharashtra State, MumbaiShubham DahatondeОценок пока нет
- CNNPX310R-6P: General SpecificationsДокумент5 страницCNNPX310R-6P: General SpecificationsZoheir KacimiОценок пока нет
- DR - Rajinikanth - Pharmaceutical ValidationДокумент54 страницыDR - Rajinikanth - Pharmaceutical Validationمحمد عطاОценок пока нет
- DLL - English 5 - Q3 - W8Документ8 страницDLL - English 5 - Q3 - W8Merlyn S. Al-osОценок пока нет
- Trainer Manual Internal Quality AuditДокумент32 страницыTrainer Manual Internal Quality AuditMuhammad Erwin Yamashita100% (5)
- 3D Tetris Cake Evening 2Документ13 страниц3D Tetris Cake Evening 2Subham KarmakarОценок пока нет
- Lecture Notes - Introduction To Big DataДокумент8 страницLecture Notes - Introduction To Big Datasakshi kureley0% (1)
- Project ProposalДокумент2 страницыProject Proposalqueen malik80% (5)
- Grade 6 q2 Mathematics LasДокумент151 страницаGrade 6 q2 Mathematics LasERIC VALLE80% (5)
- Conference Paper 2Документ5 страницConference Paper 2Sri JayanthОценок пока нет
- WT&D (Optimization of WDS) PDFДокумент89 страницWT&D (Optimization of WDS) PDFAbirham TilahunОценок пока нет
- GeminiДокумент397 страницGeminiJohnnyJC86Оценок пока нет
- ParaphrasingДокумент11 страницParaphrasingAntiiSukmaОценок пока нет
- Technical Textile and SustainabilityДокумент5 страницTechnical Textile and SustainabilityNaimul HasanОценок пока нет
- Module 1 Dynamics of Rigid BodiesДокумент11 страницModule 1 Dynamics of Rigid BodiesBilly Joel DasmariñasОценок пока нет
- 5 Ways To Make A USB BootableДокумент6 страниц5 Ways To Make A USB Bootableconnect.rohit85Оценок пока нет