Вам также может понравиться
- Root LocusДокумент64 страницыRoot Locus200110039Оценок пока нет
- MEM 355 Homework 2Документ6 страницMEM 355 Homework 2ramОценок пока нет
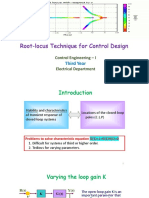
- Root-Locus Technique For Control Design: Third YearДокумент48 страницRoot-Locus Technique For Control Design: Third YearHassan Al BaityОценок пока нет
- Qualitative Graphical Representation of Nyquist PlotsДокумент20 страницQualitative Graphical Representation of Nyquist PlotsSazy TP MisbidОценок пока нет
- Ee481 p10 Root - LocusДокумент37 страницEe481 p10 Root - Locusminato4thОценок пока нет
- TC Slides Prat2 1 FCДокумент19 страницTC Slides Prat2 1 FCRodrigo GomesОценок пока нет
- Controls FДокумент15 страницControls Fjerick garlejoОценок пока нет
- Huang MVC GeneralДокумент27 страницHuang MVC GeneralgatzkeОценок пока нет
- DCLec 10Документ6 страницDCLec 10AwadHilmyОценок пока нет
- Nyquist Stability Criterion Nyquist Stability Criterion (More Examples) Phase and Gain Margins From Nyquist PlotsДокумент21 страницаNyquist Stability Criterion Nyquist Stability Criterion (More Examples) Phase and Gain Margins From Nyquist PlotsYusra AmeenОценок пока нет
- RootДокумент4 страницыRootagung firmanaОценок пока нет
- Cheat Sheet II S Bs ... S As ... : M m1 N n1Документ1 страницаCheat Sheet II S Bs ... S As ... : M m1 N n1Ryan BlancОценок пока нет
- B4 - State Space Stability - SlidesДокумент30 страницB4 - State Space Stability - SlidesAli ZunairОценок пока нет
- A6 SolutionДокумент8 страницA6 SolutionRaja KumarОценок пока нет
- HW 5 SolДокумент10 страницHW 5 SolPedroОценок пока нет
- ch03 Sol FG 10thДокумент83 страницыch03 Sol FG 10th김서진Оценок пока нет
- Root Locus RulesДокумент3 страницыRoot Locus RulesCollins EhizojieОценок пока нет
- Formula SheetДокумент2 страницыFormula SheetBrendanОценок пока нет
- Lec 6 Unit 3 Stability AnalysisДокумент23 страницыLec 6 Unit 3 Stability Analysisharsh singhОценок пока нет
- Suggested Solution To Past Papers PDFДокумент20 страницSuggested Solution To Past Papers PDFMgla AngelОценок пока нет
- Dokumen - Tips Control Systems Lehigh University Inconsylabcssme389lectureslecture07pidpdfДокумент9 страницDokumen - Tips Control Systems Lehigh University Inconsylabcssme389lectureslecture07pidpdfعادل محمودОценок пока нет
- Lec 6 Unit 3 Stability AnalysisДокумент23 страницыLec 6 Unit 3 Stability Analysisharsh singhОценок пока нет
- Lecture No. 3 2022 23Документ11 страницLecture No. 3 2022 23Sean Ben KadusaleОценок пока нет
- Discrete DistributionsДокумент19 страницDiscrete DistributionsWilder Gonzalez DiazОценок пока нет
- Ejercicios NyquistДокумент13 страницEjercicios Nyquistpepe gomezОценок пока нет
- Ps6sol v2 PDFДокумент13 страницPs6sol v2 PDFRahuldev MuraleedharanОценок пока нет
- Chapter 1-Root LocusДокумент52 страницыChapter 1-Root Locusmuiz_jojoОценок пока нет
- MTHS2007 Formula SheetwithtablescorrectedДокумент3 страницыMTHS2007 Formula SheetwithtablescorrectedBenjamin OpokuОценок пока нет
- Signal and System Lecture 21Документ22 страницыSignal and System Lecture 21ali_rehman87Оценок пока нет
- Module 5: Design of Sampled Data Control Systems: Lecture Note 1Документ6 страницModule 5: Design of Sampled Data Control Systems: Lecture Note 1ohioОценок пока нет
- MTH001Документ227 страницMTH001AliОценок пока нет
- Ch-7 Root Locus and Contour SlideДокумент46 страницCh-7 Root Locus and Contour SlideTushar GuptaОценок пока нет
- Identidades y Propiedades Matemáticas.: = − 2 α α α cos cos cos ± = ⋅ ⋅ m sen ω = + 2 = + 2Документ1 страницаIdentidades y Propiedades Matemáticas.: = − 2 α α α cos cos cos ± = ⋅ ⋅ m sen ω = + 2 = + 2LEONELA REYESОценок пока нет
- Root LocusДокумент33 страницыRoot LocusRajendar PonagantiОценок пока нет
- HW1 SolutionДокумент8 страницHW1 Solutionم/ياسـر يحيـى الحمـزيОценок пока нет
- x + 2β ˙x + ω x = 0 A β − ω t − β − ω t x + 2β ˙x + ω x=AcosωtДокумент11 страницx + 2β ˙x + ω x = 0 A β − ω t − β − ω t x + 2β ˙x + ω x=AcosωtStephany SamoОценок пока нет
- Qualifying Fall 202 0Документ9 страницQualifying Fall 202 0Saswata MandalОценок пока нет
- G(s) = k s (τs+1) G s) = τs+1) : = 5 ; M = 0.5 ln (0.5) + ln (0.5) = 0.215453762Документ8 страницG(s) = k s (τs+1) G s) = τs+1) : = 5 ; M = 0.5 ln (0.5) + ln (0.5) = 0.215453762Diana UlloaОценок пока нет
- Luc CA 2018 Root LocusДокумент15 страницLuc CA 2018 Root LocusUM ZaidОценок пока нет
- Control Ch8Документ13 страницControl Ch8Wunna SweОценок пока нет
- Solution Assignment 5Документ9 страницSolution Assignment 5sushant sharmaОценок пока нет
- HW04Документ2 страницыHW04api-3724389Оценок пока нет
- Review: Today's Topic:: Pay Attention in Class!!Документ31 страницаReview: Today's Topic:: Pay Attention in Class!!Tadeu FelixОценок пока нет
- Tutorial 8 LT1Документ5 страницTutorial 8 LT1pizzagodОценок пока нет
- Chapter 5 - Root Locus - HO PDFДокумент6 страницChapter 5 - Root Locus - HO PDFReinaldy MaslimОценок пока нет
- EquinoctalElements ModifiedДокумент9 страницEquinoctalElements ModifiedOrlyn DanielsОценок пока нет
- SC617 EndtermДокумент5 страницSC617 EndtermHarshil NaikОценок пока нет
- Mathematical Foundation: 1 Running TimeДокумент6 страницMathematical Foundation: 1 Running TimeHiten LohakareОценок пока нет
- Chap10 - 2 - Stability of Closed-Loop Control SystemsДокумент27 страницChap10 - 2 - Stability of Closed-Loop Control SystemsSaidОценок пока нет
- Splines: Fundamentos y Teor Ia de Aproximaci On: Tema 1: Espacios de Funciones de Tipo SplineДокумент21 страницаSplines: Fundamentos y Teor Ia de Aproximaci On: Tema 1: Espacios de Funciones de Tipo SplineEduardo Daniel Farfán DuránОценок пока нет
- Pre Calculus Formulas Btvted CH 1c 1Документ2 страницыPre Calculus Formulas Btvted CH 1c 1Kathrean Dane SuarezОценок пока нет
- Lec 3 Root Locus MethodДокумент9 страницLec 3 Root Locus MethodAep Kusman HeriyantoОценок пока нет
- The Discrete Cosine Transform Over Prime Finite Fields: (Hmo, Marciam, Ricardo) @ufpe - BR, MMV@Документ6 страницThe Discrete Cosine Transform Over Prime Finite Fields: (Hmo, Marciam, Ricardo) @ufpe - BR, MMV@Jorge OñateОценок пока нет
- Differential Calculus PDFДокумент5 страницDifferential Calculus PDFDroffilc Nav Cm MulihamОценок пока нет
- SolutionsДокумент16 страницSolutionsKireziОценок пока нет
- Sheet 11 SolutionsДокумент6 страницSheet 11 SolutionsMehul PatilОценок пока нет
- Root Locus Design Method PDFДокумент18 страницRoot Locus Design Method PDFDavid Portela MontealegreОценок пока нет
- Root Locus Plots of Positive Feedback Systems Ongata BM ExtensionДокумент8 страницRoot Locus Plots of Positive Feedback Systems Ongata BM ExtensionOLAGO ACHOKAОценок пока нет
- E-Caps-10: Mathematics: CF & Second Step For JEE (Main & Advanced) - 2020Документ3 страницыE-Caps-10: Mathematics: CF & Second Step For JEE (Main & Advanced) - 2020Gaurav SinghОценок пока нет
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesОт EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesРейтинг: 1.5 из 5 звезд1.5/5 (2)
- 3.1 External Forced Convection PDFДокумент32 страницы3.1 External Forced Convection PDFJackson TeohОценок пока нет
- Before 4pm, Friday, 2 August 2019) : Figure Q1Документ3 страницыBefore 4pm, Friday, 2 August 2019) : Figure Q1Jackson TeohОценок пока нет
- 3.1 External Forced ConvectionДокумент32 страницы3.1 External Forced ConvectionJackson TeohОценок пока нет
- Tutorial 2Документ3 страницыTutorial 2Jackson TeohОценок пока нет
- Internal Forced Internal Forced Internal Forced Internal Forced Convection Convection Convection ConvectionДокумент9 страницInternal Forced Internal Forced Internal Forced Internal Forced Convection Convection Convection ConvectionJackson TeohОценок пока нет
- Ehm 3066 Engineer and Soceity TRIMESTER 3 2017/2018 Chapter 2 TutorialДокумент1 страницаEhm 3066 Engineer and Soceity TRIMESTER 3 2017/2018 Chapter 2 TutorialJackson TeohОценок пока нет
- Supply-ChainДокумент61 страницаSupply-ChainJackson TeohОценок пока нет
- Tutorial 12 Scheduling 2017-18Документ4 страницыTutorial 12 Scheduling 2017-18Jackson TeohОценок пока нет
- Lean SystemДокумент33 страницыLean SystemJackson TeohОценок пока нет
- MTS MOM 1730 TutorialДокумент3 страницыMTS MOM 1730 TutorialJackson TeohОценок пока нет
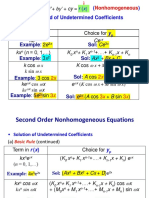
- Ay"+ By' + Cy : (A) Basic Rule Term in Choice For 2eДокумент4 страницыAy"+ By' + Cy : (A) Basic Rule Term in Choice For 2eJackson TeohОценок пока нет
- Availability Analysis: Tutorial QuestionsДокумент2 страницыAvailability Analysis: Tutorial QuestionsJackson TeohОценок пока нет
- Tutorial 3 QuestionДокумент4 страницыTutorial 3 QuestionJackson TeohОценок пока нет
- EME 1066 Strength of Materials 2016/2017/02: Tutorial Solution 1Документ7 страницEME 1066 Strength of Materials 2016/2017/02: Tutorial Solution 1Jackson TeohОценок пока нет
- EME 1066 Strength of Materials 2015/2016/02: Tutorial Solution 4Документ13 страницEME 1066 Strength of Materials 2015/2016/02: Tutorial Solution 4Jackson TeohОценок пока нет
- API Valves: A. API Gate Valves B. Mud Gate Valves C. API Plug ValvesДокумент15 страницAPI Valves: A. API Gate Valves B. Mud Gate Valves C. API Plug Valveskaveh-bahiraeeОценок пока нет
- Reporte ReservasДокумент184 страницыReporte Reservasjair coronadoОценок пока нет
- Authorization For Entering Manual ConditionsДокумент15 страницAuthorization For Entering Manual ConditionsSushil Sarkar100% (2)
- 14 Design of Bolted JointsДокумент13 страниц14 Design of Bolted JointsPRASAD32675% (4)
- Boston Matrix of CokeДокумент11 страницBoston Matrix of CokeIrvin A. OsnayaОценок пока нет
- Helios Uk ElsДокумент22 страницыHelios Uk ElssanitermОценок пока нет
- Ansi C37.72-1987 PDFДокумент25 страницAnsi C37.72-1987 PDFIvanОценок пока нет
- D&D 5e Conditions Player ReferenceДокумент1 страницаD&D 5e Conditions Player ReferenceFrank Wilcox, Jr (fewilcox)Оценок пока нет
- 49 CFR 195Документ3 страницы49 CFR 195danigna77Оценок пока нет
- Datasheet 12NA60Документ11 страницDatasheet 12NA60ed pwtОценок пока нет
- NiplesДокумент59 страницNiplesJose LiraОценок пока нет
- Initial PID - 19-0379 A01 01Документ39 страницInitial PID - 19-0379 A01 01rajap2737Оценок пока нет
- Quadcopter Design DocumentДокумент23 страницыQuadcopter Design Documentapi-556772195Оценок пока нет
- NS2 Simple Simulation ExampleДокумент5 страницNS2 Simple Simulation ExamplepradeepОценок пока нет
- SCW PQSДокумент67 страницSCW PQStabathadennis100% (1)
- J Proc CTRL Vol 19 2009 Q Wang K Astrom - Guaranteed Dominant Pole PlacementДокумент4 страницыJ Proc CTRL Vol 19 2009 Q Wang K Astrom - Guaranteed Dominant Pole PlacementmtichyscribdОценок пока нет
- Plate and Frame Filter PressДокумент11 страницPlate and Frame Filter PressOmar Bassam0% (1)
- Testing A SCRДокумент2 страницыTesting A SCRtenisonОценок пока нет
- Iso 21969 2009 en PDFДокумент8 страницIso 21969 2009 en PDFAnonymous P7J7V4Оценок пока нет
- Rahul BhartiДокумент3 страницыRahul BhartirahuldearestОценок пока нет
- Bridge and Structural EngineeringДокумент4 страницыBridge and Structural EngineeringAkhil100% (1)
- Issues in Timing: Digital Integrated Circuits © Prentice Hall 1995 TimingДокумент14 страницIssues in Timing: Digital Integrated Circuits © Prentice Hall 1995 TimingAbhishek BhardwajОценок пока нет
- AssignmentДокумент2 страницыAssignmentPhước ĐặngОценок пока нет
- B-Trees and B+-Trees: Jay Yim CS 157B Dr. LeeДокумент34 страницыB-Trees and B+-Trees: Jay Yim CS 157B Dr. LeemaskplyОценок пока нет
- Project 1 - Nimisha AgrawalДокумент13 страницProject 1 - Nimisha AgrawalNimisha AgrawalОценок пока нет
- Manual Operacion Compresores de AireДокумент204 страницыManual Operacion Compresores de AireHugo RodriguezОценок пока нет
- ATB Riva Calzoni Gianluca RaseniДокумент35 страницATB Riva Calzoni Gianluca RaseniDiana QuinteroОценок пока нет
- 1St Flr. Reflected Ceiling Plan 2Nd Flr. Reflected Ceiling PlanДокумент1 страница1St Flr. Reflected Ceiling Plan 2Nd Flr. Reflected Ceiling PlanMac KYОценок пока нет
- 50Hz Curves Series 912Документ38 страниц50Hz Curves Series 912Vero ColladoОценок пока нет
- ABB - PCS 6000 STATCOM - Reference ListДокумент8 страницABB - PCS 6000 STATCOM - Reference ListProyectos IPC S.A.S - Manuel CadenaОценок пока нет