Вам также может понравиться
- Armónicas en Sistemas Eléctricos IndustrialesОт EverandArmónicas en Sistemas Eléctricos IndustrialesРейтинг: 4.5 из 5 звезд4.5/5 (12)
- Curso moderno de máquinas eléctricas rotativas. Tomo II: Máquinas de corriente continuaОт EverandCurso moderno de máquinas eléctricas rotativas. Tomo II: Máquinas de corriente continuaОценок пока нет
- Celdas de FlotacionДокумент13 страницCeldas de FlotacionNilton CjОценок пока нет
- 6 Mini Proyectos de ElectronicaДокумент5 страниц6 Mini Proyectos de ElectronicaJavier Alejandro Velderrain Garcia100% (2)
- Relevadores de ProtecciónДокумент24 страницыRelevadores de ProtecciónGioh Berseker100% (1)
- 2.5 Programación de Puertos Con Interfaces de Potencia: TransistoresДокумент7 страниц2.5 Programación de Puertos Con Interfaces de Potencia: TransistoresOmar Ezequiel Colli Correa0% (1)
- Fahrenheit 451 BradburyДокумент154 страницыFahrenheit 451 BradburyMebel Perez Pinedo100% (1)
- Sistema RossДокумент12 страницSistema RossIvan Villarreal LopezОценок пока нет
- Laboratorio Reguladores de VoltajeДокумент7 страницLaboratorio Reguladores de VoltajeJOHN FRANKLIN IBAGOS ROLDANОценок пока нет
- Tubo Fluorescente de 12vДокумент21 страницаTubo Fluorescente de 12vCarlos Alfredo CalderonОценок пока нет
- Proyecto ProfesorДокумент25 страницProyecto ProfesorchunopkoОценок пока нет
- Manual s10 Presupuestos 11935Документ47 страницManual s10 Presupuestos 11935Metodio Valentin Quispe MamaniОценок пока нет
- Proyecto Puerta InteligenteДокумент36 страницProyecto Puerta InteligenteAbis Jasso GalindoОценок пока нет
- Diagrama de IshikawaДокумент1 страницаDiagrama de IshikawaAnonymous r6kwYfjCWqОценок пока нет
- IDE Arduino + ArddublockДокумент35 страницIDE Arduino + ArddublockSinezio JuniorОценок пока нет
- Capítulo 2 - Requerimientos de Una SoldaduraДокумент29 страницCapítulo 2 - Requerimientos de Una SoldaduraRojo FelixОценок пока нет
- Rescate Con Cuerdas 2019Документ71 страницаRescate Con Cuerdas 2019halexis258mОценок пока нет
- Accionamientos Electricos IДокумент55 страницAccionamientos Electricos IJr Hernandez100% (1)
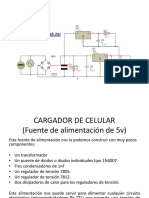
- Cargador de CelularДокумент10 страницCargador de CelularDiego PérezОценок пока нет
- Reles y Motores Paso A PasoДокумент6 страницReles y Motores Paso A PasoGueryDeLaBarraCervantesОценок пока нет
- Relés de Voltaje - Relés Térmicos y OtrosДокумент31 страницаRelés de Voltaje - Relés Térmicos y OtrosJaviel SánchezОценок пока нет
- Monitor de FaseДокумент2 страницыMonitor de FaseRamon Uriel Rosado HerculesОценок пока нет
- Clase 4Документ28 страницClase 4tony sukakuОценок пока нет
- Informe 3conversores AC-ACДокумент11 страницInforme 3conversores AC-ACCarlos Vallejo MoralesОценок пока нет
- 3 ArduinosДокумент30 страниц3 Arduinosfernandezsandovalj423Оценок пока нет
- Luz Nocturna Automatic1Документ10 страницLuz Nocturna Automatic1Cesar Ayasta CasianoОценок пока нет
- 12V A 5VДокумент4 страницы12V A 5VoscarОценок пока нет
- Rele de Potencia InversaДокумент2 страницыRele de Potencia Inversahttp://elmaquinista.foroargentina.net/forumОценок пока нет
- Qué Es Un RelevadorДокумент4 страницыQué Es Un RelevadorツCarlos Maximiliano Alejo castilloОценок пока нет
- Ejemplo - Diagramas ElectricosДокумент28 страницEjemplo - Diagramas ElectricosSTEPHANIA SorianoОценок пока нет
- Manual de Operacion e Instalacion Inversor Sine Wave PlatinumДокумент17 страницManual de Operacion e Instalacion Inversor Sine Wave PlatinumAmauryVargasОценок пока нет
- Control Industrial y PlcsДокумент49 страницControl Industrial y Plcsbenjamin palavecinoОценок пока нет
- Arrancadores de MotoresДокумент59 страницArrancadores de MotoresCesar Huamani100% (1)
- RAMPAДокумент3 страницыRAMPAJulyo GonzalesОценок пока нет
- 1 Modo Relé ArduinoДокумент17 страниц1 Modo Relé ArduinoeddyОценок пока нет
- Explicacion Del ProllectoДокумент4 страницыExplicacion Del Prollectocristian alexis rubio galvisОценок пока нет
- Taller de ProteccionesДокумент26 страницTaller de ProteccionesJesusОценок пока нет
- Circuito de PotenciaДокумент2 страницыCircuito de PotenciadeviljimmyОценок пока нет
- Timer 555Документ15 страницTimer 555oconer51Оценок пока нет
- S15es PDFДокумент14 страницS15es PDFFrancisco SolarОценок пока нет
- Infografia 3Документ13 страницInfografia 3Allan HernándezОценок пока нет
- Intermitente LED Ajustable Usando El Integrado 555Документ11 страницIntermitente LED Ajustable Usando El Integrado 555Victor Javier ZavaletaОценок пока нет
- Proyecto Electronica 6toДокумент11 страницProyecto Electronica 6toAlexa DindaОценок пока нет
- Taller de Electronica Basica Resistencias Final 555 BombilloДокумент5 страницTaller de Electronica Basica Resistencias Final 555 BombillojjhernanОценок пока нет
- Actividad .-4Документ6 страницActividad .-4Anubis Dann Soto HernándezОценок пока нет
- Catálogo FinderДокумент20 страницCatálogo FinderguillermoОценок пока нет
- Relé Contactor Variadores de FrecuenciaДокумент21 страницаRelé Contactor Variadores de Frecuenciajose sanchezzОценок пока нет
- Arranque de MotoresДокумент28 страницArranque de Motorespatrick corcueraОценок пока нет
- Contador de ObjetosДокумент11 страницContador de ObjetosJúnior HernándezОценок пока нет
- Tarea 9Документ3 страницыTarea 9ElmemoОценок пока нет
- Secuenciador de 5 Canales y 2 EfectosДокумент2 страницыSecuenciador de 5 Canales y 2 EfectosDjbryan TorresОценок пока нет
- 6 Mini CircuitosДокумент5 страниц6 Mini CircuitoshectcandОценок пока нет
- Sensor TactilДокумент19 страницSensor TactilRafael Vilchez SanchezОценок пока нет
- Reles TiposДокумент17 страницReles TiposAndy HatsОценок пока нет
- Avr 5PDFДокумент2 страницыAvr 5PDFHector suarezОценок пока нет
- Electronica 2 Tarea Semana2Документ5 страницElectronica 2 Tarea Semana2Christian OrellanaОценок пока нет
- Equipo Carlos Conmutador de Posicic3b3n y Conmutador de Secuencia MovidaДокумент8 страницEquipo Carlos Conmutador de Posicic3b3n y Conmutador de Secuencia Movidamiguel itsonОценок пока нет
- Regulador de PotenciaДокумент21 страницаRegulador de Potenciajudi02Оценок пока нет
- Rele de Potencia InversaДокумент3 страницыRele de Potencia InversaGonzalo Machicado100% (1)
- M3 UF1 Tema 8 Arranque Control Protecc MotДокумент40 страницM3 UF1 Tema 8 Arranque Control Protecc MotFrancesc Juanes CamposОценок пока нет
- 6to Electricidad Equipos de Protección y ManiobraДокумент18 страниц6to Electricidad Equipos de Protección y ManiobraCarlos RodriguezОценок пока нет
- Fuente de PoderДокумент2 страницыFuente de PoderMtx ReyesОценок пока нет
- Proyecto ControlДокумент12 страницProyecto ControlJAIR_0927Оценок пока нет
- Tipos de RelesДокумент3 страницыTipos de RelesAngelica GuijarroОценок пока нет
- 2022 Preguntas Final 19 - 24Документ47 страниц2022 Preguntas Final 19 - 24Lu ReynosoОценок пока нет
- Práctica 15. Subredes Por VLSMДокумент3 страницыPráctica 15. Subredes Por VLSMOrion EspОценок пока нет
- Wifi - Wifi, La Enciclopedia LibreДокумент8 страницWifi - Wifi, La Enciclopedia LibreOrion EspОценок пока нет
- Primeros PasosДокумент36 страницPrimeros PasosDarioZaldivarОценок пока нет
- Guia NumeracionДокумент32 страницыGuia NumeracionOrion EspОценок пока нет
- Instalaciones Flexibles de Telefonía Interior - T4Документ8 страницInstalaciones Flexibles de Telefonía Interior - T4Orion EspОценок пока нет
- Carlos Tutosaus-Introduccion - AutomatizacionДокумент45 страницCarlos Tutosaus-Introduccion - AutomatizacionJosé Alejandro Aguilar FernandezОценок пока нет
- Numeración TelefonicaДокумент2 страницыNumeración TelefonicaOrion EspОценок пока нет
- Uso Del OsciloscopioДокумент11 страницUso Del OsciloscopiojocarcamoОценок пока нет
- LanzДокумент2 страницыLanzOrion EspОценок пока нет
- Teoria de Control Electronico. HOSTETTERДокумент378 страницTeoria de Control Electronico. HOSTETTERJeremiah MartinezОценок пока нет
- Programación Automatismos Industriales 2016Документ30 страницProgramación Automatismos Industriales 2016emilianoОценок пока нет
- Automatismos Industriales UD01 PDFДокумент38 страницAutomatismos Industriales UD01 PDFHeriberto Salvador Salort Bizama100% (1)
- Etapas de PotenciaДокумент12 страницEtapas de PotenciaOrion EspОценок пока нет
- Extracto ICT Sobre Fibra ÓpticДокумент22 страницыExtracto ICT Sobre Fibra ÓpticOrion EspОценок пока нет
- Convocatoria Secundaria LibreДокумент150 страницConvocatoria Secundaria LibreAra CMОценок пока нет
- Software ElementalДокумент21 страницаSoftware ElementalOrion EspОценок пока нет
- Variables PDFДокумент9 страницVariables PDFOrion EspОценок пока нет
- Comunicaciones SerialesДокумент18 страницComunicaciones SerialesOrion EspОценок пока нет
- Etapas de PotenciaДокумент12 страницEtapas de PotenciaOrion EspОценок пока нет
- Actividades 1 Con MULTISIMДокумент14 страницActividades 1 Con MULTISIMOrion EspОценок пока нет
- EA Digital-2 BooleДокумент19 страницEA Digital-2 BooleOrion EspОценок пока нет
- EA Digital-2 BooleДокумент19 страницEA Digital-2 BooleOrion EspОценок пока нет
- Practica9 2Документ3 страницыPractica9 2Orion EspОценок пока нет
- Construccion PCBДокумент8 страницConstruccion PCBByron MonteroОценок пока нет
- Practica Equipos Laboratorio GeneralДокумент17 страницPractica Equipos Laboratorio GeneralAlvaro MallcuОценок пока нет
- Diseño de Circuitos Impresos PDFДокумент8 страницDiseño de Circuitos Impresos PDFfabiangerstnerОценок пока нет
- Practica8 PDFДокумент8 страницPractica8 PDFOrion EspОценок пока нет
- IES Especial Dificultad CT 16-17Документ8 страницIES Especial Dificultad CT 16-17Fernando Sanchez VillalbaОценок пока нет
- 043 B PropuestaMarco AccesoFPubl+ConsolidEmpleoДокумент2 страницы043 B PropuestaMarco AccesoFPubl+ConsolidEmpleoOrion EspОценок пока нет
- Adf 59809 A 7Документ92 страницыAdf 59809 A 7Angie Dessiré Mayanga PinedoОценок пока нет
- Procedimiento de Trabajo Seguro TaladroДокумент12 страницProcedimiento de Trabajo Seguro TaladroadmОценок пока нет
- Laminas Unidad IVДокумент32 страницыLaminas Unidad IVOSIRIS MARLEN HERRERA MENDOZAОценок пока нет
- MEDICIONES TERMOQUIMICAS CorregidasДокумент4 страницыMEDICIONES TERMOQUIMICAS CorregidasGabriel Andres Vega AllpaccaОценок пока нет
- 2022 07 28 - 0925c5cd288410Документ3 страницы2022 07 28 - 0925c5cd288410Paola PadillaОценок пока нет
- Materiales BituminososДокумент27 страницMateriales BituminososEdmundoMarroquinSoelОценок пока нет
- Final de Carrera NeumaticoДокумент1 страницаFinal de Carrera NeumaticoEnderson Jose Quintero GrimaldosОценок пока нет
- Datasheet Luminaria Vial Led 200WДокумент1 страницаDatasheet Luminaria Vial Led 200WZH TerrorОценок пока нет
- Ensayo Sobre El AceroДокумент7 страницEnsayo Sobre El Aceroegb0% (1)
- Qué Es SinónimoДокумент7 страницQué Es Sinónimogregory rafael goitia lopezОценок пока нет
- 06 TallerДокумент3 страницы06 TallerJuan Pablo TrujilloОценок пока нет
- Modelo Plan Mantencion de MOTOSIERRASДокумент14 страницModelo Plan Mantencion de MOTOSIERRASLeonardo AbarcaОценок пока нет
- Leyes Del ElectromagnetismoДокумент3 страницыLeyes Del ElectromagnetismoJose Alfredo Rey MendezОценок пока нет
- Valvulas ElectroneumaticasДокумент21 страницаValvulas ElectroneumaticasIrvin VenzorОценок пока нет
- UNESCO, COI. 1982. Det. HC Del Petróleo en Sedimentos. Manuales y Guías N°11.Документ35 страницUNESCO, COI. 1982. Det. HC Del Petróleo en Sedimentos. Manuales y Guías N°11.Marcelo ManzoОценок пока нет
- PolonioДокумент5 страницPolonioMartin VillaОценок пока нет
- Visita Tecnica Talara 2019 Uni - PVTДокумент15 страницVisita Tecnica Talara 2019 Uni - PVTAraceli HCОценок пока нет
- Determinación de La Capacidad Del Cargador de BateríasДокумент2 страницыDeterminación de La Capacidad Del Cargador de BateríasbrayanxiitoОценок пока нет
- Soldadura Peligros NioshДокумент9 страницSoldadura Peligros Niosh666osmarОценок пока нет
- p26728 Led Reflector Jeta 50w DL (Ficha)Документ1 страницаp26728 Led Reflector Jeta 50w DL (Ficha)luis narvaezОценок пока нет
- 1 Anexo 2 Nicolas Alvarado Morales 030223Документ1 страница1 Anexo 2 Nicolas Alvarado Morales 030223madcascОценок пока нет
- Documento Intro Joca Parte 1Документ52 страницыDocumento Intro Joca Parte 1Freddy De La Barra Ochoa100% (3)
- Catálogo: de Productos WalldecorДокумент31 страницаCatálogo: de Productos WalldecorElias MoisesОценок пока нет
- Gasoducto El EncinoДокумент148 страницGasoducto El EncinoRom KazОценок пока нет