Вам также может понравиться
- 8.1. - Latitud Por Meridiana de Sol PDFДокумент1 страница8.1. - Latitud Por Meridiana de Sol PDFJhonnatan Manrique0% (1)
- Tema #2.0. - Diseño Por Carga Perpendicular Al PlanoДокумент107 страницTema #2.0. - Diseño Por Carga Perpendicular Al PlanoEnrique VigilОценок пока нет
- Generador de Plasma LíquidoДокумент27 страницGenerador de Plasma Líquidoadrian100% (1)
- Bioseguridad en El Laboratorio de BioquimicaДокумент16 страницBioseguridad en El Laboratorio de BioquimicaAngel Medina100% (1)
- Circuitos MixtosДокумент17 страницCircuitos MixtosCarlos Reyes0% (1)
- Prueba Diag. Matematica 5ºДокумент4 страницыPrueba Diag. Matematica 5ºKarina Cortez AguirreОценок пока нет
- Explicar El Comportamiento de La Unión Semiconductora PN.Документ1 страницаExplicar El Comportamiento de La Unión Semiconductora PN.Angel Medina100% (1)
- Balanceo de Lineas 2Документ10 страницBalanceo de Lineas 2Angel MedinaОценок пока нет
- Distribucion en PlantaДокумент26 страницDistribucion en PlantaAngel MedinaОценок пока нет
- Telas ValdemarДокумент1 страницаTelas ValdemarAngel MedinaОценок пока нет
- Comunicación Verbal 1Документ21 страницаComunicación Verbal 1Angel MedinaОценок пока нет
- Actividad 2 RoboticaДокумент11 страницActividad 2 RoboticaAngel MedinaОценок пока нет
- Las partes de la gramática y sus funcionesДокумент11 страницLas partes de la gramática y sus funcionesAngel MedinaОценок пока нет
- Comunicación Verbal 2Документ10 страницComunicación Verbal 2Angel MedinaОценок пока нет
- Tratamientos Termicos2Документ54 страницыTratamientos Termicos2Luis AntonОценок пока нет
- Administracion de La ProduccionДокумент64 страницыAdministracion de La ProduccionAngel MedinaОценок пока нет
- Campo Electrico y PotencialДокумент30 страницCampo Electrico y PotencialAngel MedinaОценок пока нет
- Liquidos PenetrantesДокумент5 страницLiquidos PenetrantesJason PalmerОценок пока нет
- Enlace 2010Документ25 страницEnlace 2010Maximino Cruz Torres100% (3)
- Concentrado de Tabla de ConversionesДокумент5 страницConcentrado de Tabla de ConversionesGustavo ValenciaОценок пока нет
- Libro de MandalasДокумент23 страницыLibro de MandalasAngel MedinaОценок пока нет
- Análisis de VibracionesДокумент23 страницыAnálisis de VibracionesAngel MedinaОценок пока нет
- Mantenimientomecanico 140825204723 Phpapp01Документ42 страницыMantenimientomecanico 140825204723 Phpapp01Angel MedinaОценок пока нет
- Liquidos PenetrantesДокумент5 страницLiquidos PenetrantesJason PalmerОценок пока нет
- Acento DiacríticoДокумент2 страницыAcento DiacríticoAngel MedinaОценок пока нет
- Ad Ministracion de La ProducciónДокумент64 страницыAd Ministracion de La ProducciónMarita Reyes DiazОценок пока нет
- La Coma PDFДокумент2 страницыLa Coma PDFAngel MedinaОценок пока нет
- Evolución Histórica de La Filosofía-Eudoro Terrones NegreteДокумент39 страницEvolución Histórica de La Filosofía-Eudoro Terrones NegreteReste GiusОценок пока нет
- BiologiaДокумент5 страницBiologiaAngel MedinaОценок пока нет
- Procesodearranquesinviruta 120708214702 Phpapp02Документ14 страницProcesodearranquesinviruta 120708214702 Phpapp02Franchesca Carbajal TatajeОценок пока нет
- Estidio Tecnico Sobre La Elaboracion Del JabonДокумент60 страницEstidio Tecnico Sobre La Elaboracion Del JabonchrisraelОценок пока нет
- Sustantivos y pronombres: características y funcionesДокумент18 страницSustantivos y pronombres: características y funcionesAngel MedinaОценок пока нет
- Principio de IncertidumbreДокумент14 страницPrincipio de IncertidumbreAngel MedinaОценок пока нет
- Diseño de conexiones empernadas en estructuras de aceroДокумент12 страницDiseño de conexiones empernadas en estructuras de aceroJulio PillacaОценок пока нет
- Informe Resistencias ElectricasДокумент7 страницInforme Resistencias ElectricasNicole Tatiana Perez MenesesОценок пока нет
- Velocidad Media-1Документ8 страницVelocidad Media-1webjuancarlosОценок пока нет
- 1 - Ecuación de Continuidad y BEMДокумент30 страниц1 - Ecuación de Continuidad y BEMLisandra Alvarez DiazОценок пока нет
- Las Matemáticas y El Desarrollo Social - Jacques CapellonДокумент8 страницLas Matemáticas y El Desarrollo Social - Jacques CapellonJosé Daniel Guerrero Gálvez100% (1)
- Mediciones en LaboratorioДокумент4 страницыMediciones en LaboratorioAna CabreraОценок пока нет
- Norma Em. 100 Instalaciones de Alto Riesgo: Art. 6 Instalaciones para Fuentes DE Radiación IonizanteДокумент1 страницаNorma Em. 100 Instalaciones de Alto Riesgo: Art. 6 Instalaciones para Fuentes DE Radiación IonizanteRosend Pariona ParedesОценок пока нет
- Altitud y Sus consecuencias-RevE4Документ41 страницаAltitud y Sus consecuencias-RevE4Pedro Huerta SoajeОценок пока нет
- Power Point Generalidades de La QuímicaДокумент13 страницPower Point Generalidades de La Químicayolima vivasОценок пока нет
- Ley periódica: evolución de la tabla periódicaДокумент10 страницLey periódica: evolución de la tabla periódicaHerbert Isaac Arce IngaОценок пока нет
- Ejercicios de TermoquimicaДокумент23 страницыEjercicios de TermoquimicaSantiago Miñano Briceño100% (3)
- Análisis matemático A - Totalizador 3o llamadoДокумент1 страницаAnálisis matemático A - Totalizador 3o llamadoMariela MaggioОценок пока нет
- ANEXO I DETALLE INSTALACIÓN DWDM v2 PDFДокумент21 страницаANEXO I DETALLE INSTALACIÓN DWDM v2 PDFRoger Juan Gomez RamirezОценок пока нет
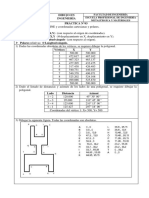
- Prac 2 CoordДокумент4 страницыPrac 2 CoordAnonimus Anonimus anonimusОценок пока нет
- Tarea 2Документ2 страницыTarea 2Humberto D. ParrillaОценок пока нет
- Fibra Harina de PescadoДокумент11 страницFibra Harina de PescadoGreissy EncinasОценок пока нет
- Informe Experimento 9 Calculo de Coeficiente de Rozamiento DinamicoДокумент14 страницInforme Experimento 9 Calculo de Coeficiente de Rozamiento DinamicoXXXMAYISTERTUTOXX XDОценок пока нет
- EmbuticiónДокумент3 страницыEmbuticiónKarina Ibarra CisnerosОценок пока нет
- Sondeos Electricos Verticales y Calicatas ElectricasДокумент34 страницыSondeos Electricos Verticales y Calicatas ElectricasWilson Jeff Espinoza Condor0% (1)
- Monografia de Acondicionamiento AmbientalДокумент15 страницMonografia de Acondicionamiento Ambientalmiguel angelОценок пока нет
- ErroresДокумент14 страницErroresjesusОценок пока нет
- Ejercicios de Curso de Física y Química de 4º 1 PDFДокумент9 страницEjercicios de Curso de Física y Química de 4º 1 PDFhousegrjОценок пока нет
- Valvula ReguladorДокумент10 страницValvula ReguladorElena SoriaОценок пока нет
- Act 9 Flexion E19Документ8 страницAct 9 Flexion E19Jose Hernandez ArenasОценок пока нет