Вам также может понравиться
- 5 Recepcion de Materiales, Embalaje y DespachoДокумент1 страница5 Recepcion de Materiales, Embalaje y DespachoeliОценок пока нет
- 4 Recepcion de Materiales, Embalaje y DespachoДокумент1 страница4 Recepcion de Materiales, Embalaje y DespachoeliОценок пока нет
- 2 Recepcion de Materiales, Embalaje y DespachoДокумент1 страница2 Recepcion de Materiales, Embalaje y DespachoeliОценок пока нет
- Perfil de Técnico de SeguridadДокумент1 страницаPerfil de Técnico de SeguridadeliОценок пока нет
- Perfil de Operario PintorДокумент1 страницаPerfil de Operario PintoreliОценок пока нет
- 3 Recepcion de Materiales, Embalaje y DespachoДокумент1 страница3 Recepcion de Materiales, Embalaje y DespachoeliОценок пока нет
- Perfil de Operario SoldadorДокумент1 страницаPerfil de Operario SoldadoreliОценок пока нет
- Perfil de Analista AdministrativoДокумент1 страницаPerfil de Analista AdministrativoeliОценок пока нет
- Perfil de Supervisor de TallerДокумент1 страницаPerfil de Supervisor de TallereliОценок пока нет
- Perfil de Logística y MantenimientoДокумент1 страницаPerfil de Logística y MantenimientoeliОценок пока нет
- Perfil de Asistente AdministrativoДокумент1 страницаPerfil de Asistente AdministrativoeliОценок пока нет
- Perfil de Supervisor SSOMAДокумент2 страницыPerfil de Supervisor SSOMAeli100% (1)
- Perfil de Asistente de CalidadДокумент1 страницаPerfil de Asistente de CalidadeliОценок пока нет
- Resumen De-Diseno de Un Sistema Automatico de Seleccion de Frutos de Cafe Mediante Tecnicas de Vision ArtificialДокумент7 страницResumen De-Diseno de Un Sistema Automatico de Seleccion de Frutos de Cafe Mediante Tecnicas de Vision ArtificialeliОценок пока нет
- StartupДокумент14 страницStartupeli100% (1)
- SubirДокумент18 страницSubireliОценок пока нет
- Etiquetas de CalibraciónДокумент2 страницыEtiquetas de Calibracióneli100% (1)
- Day TradingДокумент13 страницDay TradingeliОценок пока нет
- Zapatas ConcentricasДокумент7 страницZapatas Concentricasepa504Оценок пока нет
- Proyecto Mantenimiento Avenida JuncalДокумент19 страницProyecto Mantenimiento Avenida JuncalJuly SalazarОценок пока нет
- CAPÍTULO 3 Del Libro de La VidaДокумент6 страницCAPÍTULO 3 Del Libro de La VidaVictor VLОценок пока нет
- Salud Ocupacional-Frontera EnergyДокумент2 страницыSalud Ocupacional-Frontera EnergyXavier LignaОценок пока нет
- Histología Aparato Reproductor MasculinoДокумент6 страницHistología Aparato Reproductor MasculinoEmilia Sagripanti gomezОценок пока нет
- Lista de Utiles Primero Primaria 2023Документ1 страницаLista de Utiles Primero Primaria 2023Celeste LorenzanaОценок пока нет
- Cuarta Encuesta Sobre Consumo Drogas EL SALVADOR 2018 (ISBN)Документ146 страницCuarta Encuesta Sobre Consumo Drogas EL SALVADOR 2018 (ISBN)Richard RiccioОценок пока нет
- COGNITIVISMOДокумент11 страницCOGNITIVISMOJoseОценок пока нет
- Avenidas MaximasДокумент11 страницAvenidas MaximasMauricio CalvoОценок пока нет
- Fast Ion BatteryДокумент16 страницFast Ion BatteryMartín MaturanaОценок пока нет
- Unidad 1 Ing - Materiales MetalicosДокумент26 страницUnidad 1 Ing - Materiales MetalicosLorenzo Antonio Vasquez Garcia67% (3)
- Análisis Time-History de Edificaciones Esenciales Con Aisladores de Base y DisipadoresДокумент9 страницAnálisis Time-History de Edificaciones Esenciales Con Aisladores de Base y DisipadoresAngel TorresОценок пока нет
- Estudio Tecnico para El Incremento Del Potencial de Produccion Mediante Aplicacion de Fracturamiento Hidraulico en El Pozo DRD X1001 PDFДокумент180 страницEstudio Tecnico para El Incremento Del Potencial de Produccion Mediante Aplicacion de Fracturamiento Hidraulico en El Pozo DRD X1001 PDFArroyo H Woos100% (1)
- MODULO 1 Cap 0 INTRODUCCION DE FACILIDADES DE PRODUCCIONДокумент37 страницMODULO 1 Cap 0 INTRODUCCION DE FACILIDADES DE PRODUCCIONMarco Antonio Torrez Ibarra100% (1)
- Parvularia 4 Años f1 s1Документ18 страницParvularia 4 Años f1 s1Maria GuadalupeОценок пока нет
- Procesos Adaptativos y Mecanismos MentalesДокумент50 страницProcesos Adaptativos y Mecanismos MentalesWSteven DiazОценок пока нет
- Seguros Groupama - HogarДокумент28 страницSeguros Groupama - HogarTmaxFer100% (1)
- Cpre-Sp 508 PDFДокумент8 страницCpre-Sp 508 PDFstanleyОценок пока нет
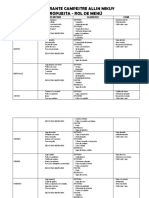
- Propuesta - Rol de MenúДокумент3 страницыPropuesta - Rol de MenúAnonymous 7VCRJYCPОценок пока нет
- Mesa de Fe 2015Документ284 страницыMesa de Fe 2015Filomena Quispe GomeОценок пока нет
- Lectura 3 - RP Tolerancias de Alineación en PoleasДокумент6 страницLectura 3 - RP Tolerancias de Alineación en PoleasDaniel MaldonadoОценок пока нет
- Competencias - Capacidades 2017Документ3 страницыCompetencias - Capacidades 2017Martha Cartagena100% (1)
- Tarea 2 - Biofisica IiДокумент2 страницыTarea 2 - Biofisica Iianahi arzamendiaОценок пока нет
- Respuestas A Desarrollar de La Segunda ParteДокумент20 страницRespuestas A Desarrollar de La Segunda Parteprofe999Оценок пока нет
- Presentación Cuenca SalitreДокумент29 страницPresentación Cuenca SalitreKaterinne Andrea Díaz OvalleОценок пока нет
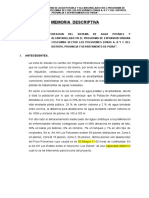
- MEMORIAДокумент45 страницMEMORIAJuan LopezОценок пока нет
- Sebd0717 Combustible y Su MotorДокумент32 страницыSebd0717 Combustible y Su MotorPercy Turpo ChipanaОценок пока нет
- Tema, Motivo y Tópico.Документ28 страницTema, Motivo y Tópico.Silvana Sotelo GómezОценок пока нет
- Informe Culminación de Año Rural - 2021Документ31 страницаInforme Culminación de Año Rural - 2021Gabriela DuqueОценок пока нет
- Actividades de RepasoДокумент7 страницActividades de RepasoAlessandra GonzalezОценок пока нет
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressОт EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressРейтинг: 5 из 5 звезд5/5 (1)
- Influencia. La psicología de la persuasiónОт EverandInfluencia. La psicología de la persuasiónРейтинг: 4.5 из 5 звезд4.5/5 (14)
- Guía para la aplicación de ISO 9001 2015От EverandGuía para la aplicación de ISO 9001 2015Рейтинг: 4 из 5 звезд4/5 (1)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.От EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Рейтинг: 4 из 5 звезд4/5 (51)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaОт EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaРейтинг: 4.5 из 5 звезд4.5/5 (117)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroОт EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroРейтинг: 4 из 5 звезд4/5 (1)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másОт EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másРейтинг: 2.5 из 5 звезд2.5/5 (3)
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosОт EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosРейтинг: 4 из 5 звезд4/5 (16)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteОт EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteРейтинг: 1 из 5 звезд1/5 (1)
- El trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.От EverandEl trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.Рейтинг: 5 из 5 звезд5/5 (1)
- Aprender HTML5, CSS3 y Javascript con 100 ejereciosОт EverandAprender HTML5, CSS3 y Javascript con 100 ejereciosРейтинг: 5 из 5 звезд5/5 (2)
- Conquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesОт EverandConquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesРейтинг: 4.5 из 5 звезд4.5/5 (2)
- El Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenОт EverandEl Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenРейтинг: 5 из 5 звезд5/5 (8)
- Agile: Una guía para la Gestión de Proyectos Agile con Scrum, Kanban y LeanОт EverandAgile: Una guía para la Gestión de Proyectos Agile con Scrum, Kanban y LeanРейтинг: 5 из 5 звезд5/5 (1)
- Python Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWAREОт EverandPython Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWAREРейтинг: 4 из 5 звезд4/5 (13)
- Aprende a Modelar Aplicaciones con UML - Tercera EdiciónОт EverandAprende a Modelar Aplicaciones con UML - Tercera EdiciónРейтинг: 2 из 5 звезд2/5 (1)
- Manual técnico para la interpretación de análisis de suelos y fertilización de cultivosОт EverandManual técnico para la interpretación de análisis de suelos y fertilización de cultivosРейтинг: 4 из 5 звезд4/5 (1)