Вам также может понравиться
- Informe de Movimiento CircularДокумент8 страницInforme de Movimiento CircularDiegoVanegasCastellanosОценок пока нет
- Informe de Lab Calor Especifico de Un Cuerpo InformeДокумент6 страницInforme de Lab Calor Especifico de Un Cuerpo InformeJOSE ANTONIO SIERRA CONEOОценок пока нет
- Emisión de luz cationesДокумент14 страницEmisión de luz cationesJorgito RuizОценок пока нет
- Física III - Laboratorio#5 - Ondas Estacionarias en CuerdasДокумент9 страницFísica III - Laboratorio#5 - Ondas Estacionarias en CuerdaskelvinОценок пока нет
- Electroestática básicaДокумент10 страницElectroestática básicaAnime Viral KawaiОценок пока нет
- Cinetica Quimica, Practica Calificada 2Документ33 страницыCinetica Quimica, Practica Calificada 2AnthonyPJОценок пока нет
- Practica 2. Relacion LinealДокумент8 страницPractica 2. Relacion LinealFRANCY YULIETH MORALES ALDANA0% (1)
- Experimento N°8Документ6 страницExperimento N°8VivianОценок пока нет
- Practica - FisicaДокумент6 страницPractica - Fisicajuan ruiz0% (1)
- FisicoquimicaДокумент17 страницFisicoquimicamilaunas93Оценок пока нет
- Pendulo SimpleДокумент8 страницPendulo SimpleJesus PerezОценок пока нет
- TERMODINÁMICAДокумент30 страницTERMODINÁMICAEvaОценок пока нет
- Crucigramafisicamagnitudes 130426152541 Phpapp01Документ2 страницыCrucigramafisicamagnitudes 130426152541 Phpapp01Angelo Huaraca Berrospi100% (1)
- Práctica 9 Comportamiento de Metales Con AcidosДокумент6 страницPráctica 9 Comportamiento de Metales Con AcidosNeeder Jhonatan TorrezОценок пока нет
- Distribución de BoltzmannДокумент14 страницDistribución de BoltzmannJhon ElvisОценок пока нет
- Péndulo SimpleДокумент11 страницPéndulo SimpleFranco MoliniОценок пока нет
- Calculaloscuatronmeroscunticosdelorbital 130111162616 Phpapp02 PDFДокумент17 страницCalculaloscuatronmeroscunticosdelorbital 130111162616 Phpapp02 PDFMaría Gonzales PérezОценок пока нет
- Práctica 1 - 3Документ14 страницPráctica 1 - 3CARMEN MARTINEZ DEL SOBRAL SINITSYNAОценок пока нет
- Practica 12Документ5 страницPractica 12Eduardo TrejoОценок пока нет
- Practico 2 FIS102 Grupo 5Документ3 страницыPractico 2 FIS102 Grupo 5Alvaro PizarroОценок пока нет
- Serie de Trabajo FisicaДокумент11 страницSerie de Trabajo FisicaDIEGO DEL CASTILLO SANCHEZОценок пока нет
- Cuestionario EstáticaДокумент6 страницCuestionario EstáticaTeru Visual KeiОценок пока нет
- Fuerza de fricción: Estudio de la fuerza estática y dinámicaДокумент14 страницFuerza de fricción: Estudio de la fuerza estática y dinámicaYarithza JerezОценок пока нет
- Laboratorio Pendulo BalisticoДокумент4 страницыLaboratorio Pendulo BalisticoValen Paredes100% (1)
- APLICACIÓN LENGUAJE TERMODINÁMICOДокумент3 страницыAPLICACIÓN LENGUAJE TERMODINÁMICOJocelyne Bruselas AuzaОценок пока нет
- Cuasi Niveles de Fermi y Recombinacion RadiactivaДокумент5 страницCuasi Niveles de Fermi y Recombinacion RadiactivaGonzzalez SsebaОценок пока нет
- Practica 4 Pendulo Simple RicardoДокумент6 страницPractica 4 Pendulo Simple RicardoAdriana DeschampsОценок пока нет
- Guia Del TP Curva de Calentamiento de LíquidosДокумент4 страницыGuia Del TP Curva de Calentamiento de Líquidoschechu.rowe57% (7)
- Movimiento AmortiguadoДокумент8 страницMovimiento AmortiguadoGuillermo CanataОценок пока нет
- Práctica No.9 CinéticaДокумент3 страницыPráctica No.9 CinéticaMaria Camila SantiagoОценок пока нет
- Informe El Cobre y Sus SalesДокумент5 страницInforme El Cobre y Sus SalesLuisEstebanTorresОценок пока нет
- Práctica 4Документ9 страницPráctica 4Verónica ChávezОценок пока нет
- Informe Oscilaciones AmortiguadasДокумент5 страницInforme Oscilaciones AmortiguadasMajo RuiizОценок пока нет
- TallerДокумент4 страницыTallerAlejandro Coronado50% (2)
- Cinética química: Factores que afectan la velocidad de reaccionesДокумент14 страницCinética química: Factores que afectan la velocidad de reaccionesLauriza Giraldo HuamanОценок пока нет
- EyC Práctica 9 Cuestionario PrevioДокумент7 страницEyC Práctica 9 Cuestionario PrevioAura McCartneyОценок пока нет
- Crecimiento y DecrecimientoДокумент14 страницCrecimiento y Decrecimientomikki107Оценок пока нет
- Informe Laboratorio 13 Solido RigidoДокумент13 страницInforme Laboratorio 13 Solido RigidoAgustín MorenoОценок пока нет
- Métodos de medición de tensión superficialДокумент5 страницMétodos de medición de tensión superficialRousalkaОценок пока нет
- EJERCICIO 3 FinalДокумент8 страницEJERCICIO 3 FinalCambb B.BОценок пока нет
- Practica #5 Condicion de EquilibrioДокумент7 страницPractica #5 Condicion de EquilibrioLuis RomeroОценок пока нет
- Infografia Primera LeyДокумент1 страницаInfografia Primera Leycasza gamerОценок пока нет
- Velocidad de Reacción y Equilibrio QuímicoДокумент15 страницVelocidad de Reacción y Equilibrio QuímicoJose Alejandro Veliz PradaОценок пока нет
- Metodologia de Ecuaciones Diferenciales de Segundo OrdenДокумент8 страницMetodologia de Ecuaciones Diferenciales de Segundo OrdenPaola Padilla BelmonteОценок пока нет
- TERM Ejercicio Lenguaje SRДокумент3 страницыTERM Ejercicio Lenguaje SRIsra VelázquezОценок пока нет
- Informe de Laboratorio Fuerzas ConcurrentesДокумент6 страницInforme de Laboratorio Fuerzas Concurrentesmikell1994Оценок пока нет
- Cuestionario Fisicoquimica 3Документ9 страницCuestionario Fisicoquimica 3jacqueline.villaОценок пока нет
- Sistema de Fuerzas Concurrentes (Practica de Lab Oratorio)Документ29 страницSistema de Fuerzas Concurrentes (Practica de Lab Oratorio)jobu92Оценок пока нет
- Practica CoagulacionДокумент8 страницPractica CoagulacionSandyCoronado100% (1)
- Teoría de Electrones Libres de MetalesДокумент5 страницTeoría de Electrones Libres de MetalesRodrigo IslasОценок пока нет
- Practica1 Equipo3 TitoДокумент12 страницPractica1 Equipo3 TitoCarlos Gerardo Serrano ValdezОценок пока нет
- RESULTADOS Y DISCUSIÓN Ley de HookeДокумент2 страницыRESULTADOS Y DISCUSIÓN Ley de HookeJuvia LoxarОценок пока нет
- Balanza de CorrienteДокумент2 страницыBalanza de CorrienteYarith LopezОценок пока нет
- T3 CienciasДокумент6 страницT3 CienciasJosh FuentesОценок пока нет
- Teorema de Torricelli: comprobación experimental de la velocidad de salida de un fluidoДокумент5 страницTeorema de Torricelli: comprobación experimental de la velocidad de salida de un fluidoDayana HernandezОценок пока нет
- Marco TeóricoДокумент6 страницMarco Teóricojose ferrerОценок пока нет
- Choque Elástico de MecanicaДокумент5 страницChoque Elástico de MecanicaPëppërs CärrëónОценок пока нет
- ENERGIA MECANICA COLISION Y MOMENTO p2Документ7 страницENERGIA MECANICA COLISION Y MOMENTO p2Derek MendozaОценок пока нет
- Choque Elástico e Inelástico Entre Dos o Más Objetos WWWWWДокумент3 страницыChoque Elástico e Inelástico Entre Dos o Más Objetos WWWWWfany_92_mrОценок пока нет
- Temas de Consulta ColisionesДокумент3 страницыTemas de Consulta ColisionesAndres SarmientoОценок пока нет
- Estructura 1Документ1 страницаEstructura 1Luis PMОценок пока нет
- JUSTIFICACIONДокумент1 страницаJUSTIFICACIONLuis PMОценок пока нет
- Resumen EjecutivoДокумент4 страницыResumen EjecutivoLuis PMОценок пока нет
- JUSTIFICACIONДокумент1 страницаJUSTIFICACIONLuis PMОценок пока нет
- Coloque V Si Es Verdadero o F Si Es Falso 2Документ1 страницаColoque V Si Es Verdadero o F Si Es Falso 2Luis PMОценок пока нет
- Ingeniería GeológicaДокумент4 страницыIngeniería GeológicaLuis PMОценок пока нет
- Especificaciones Tecnicas CivilesДокумент84 страницыEspecificaciones Tecnicas CivilesIsnaОценок пока нет
- Especificaciones - Tecnicas Proceso de Señalizacion.Документ7 страницEspecificaciones - Tecnicas Proceso de Señalizacion.Jheison Richard Zanabria NinaОценок пока нет
- Vigas TДокумент34 страницыVigas TLuis PMОценок пока нет
- UPN 2017. Trabajo Pre-Grado Analisis y Diseño de Vigas TДокумент45 страницUPN 2017. Trabajo Pre-Grado Analisis y Diseño de Vigas TJuan Perez100% (1)
- Materiales, Normativas y Especificaciones Tecnicas 1Документ35 страницMateriales, Normativas y Especificaciones Tecnicas 1Luis PMОценок пока нет
- ANÁLISISДокумент1 страницаANÁLISISLuis PMОценок пока нет
- Geología e Inenieria CivilДокумент3 страницыGeología e Inenieria CivilLuis PMОценок пока нет
- GEOLOGIAДокумент3 страницыGEOLOGIALuis PMОценок пока нет
- El ProblemaДокумент1 страницаEl ProblemaLuis PMОценок пока нет
- Estructura y Composicion 2Документ5 страницEstructura y Composicion 2Luis PMОценок пока нет
- DinamicaДокумент5 страницDinamicaLuis PMОценок пока нет
- RESUMENДокумент1 страницаRESUMENLuis PMОценок пока нет
- FichaДокумент8 страницFichaLuis PMОценок пока нет
- Tesis 1109 - Zambrano Salazar Luis LeonardoДокумент250 страницTesis 1109 - Zambrano Salazar Luis LeonardoJuan Pablo Flores Porcel100% (1)
- GEOLOGIAДокумент3 страницыGEOLOGIALuis PMОценок пока нет
- Lenguaje de ProgramaciónДокумент4 страницыLenguaje de ProgramaciónLuis PMОценок пока нет
- Perfiles Estructurales AngulosДокумент1 страницаPerfiles Estructurales AngulosLuis PMОценок пока нет
- Pregunta 2Документ1 страницаPregunta 2Luis PMОценок пока нет
- ItesmДокумент3 страницыItesmLuis PMОценок пока нет
- La Niña Que Quería Un PerroДокумент2 страницыLa Niña Que Quería Un PerroLuis PMОценок пока нет
- A Petición Verbal de La Parte Interesada Unidad de InfraestructuraДокумент1 страницаA Petición Verbal de La Parte Interesada Unidad de InfraestructuraLuis PMОценок пока нет
- Hormigon 08Документ58 страницHormigon 08Arturo Cervantes GarciaОценок пока нет
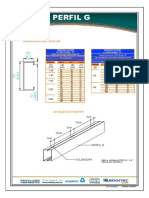
- Perfiltec GДокумент1 страницаPerfiltec GLuis PMОценок пока нет
- Hormigon 02Документ0 страницHormigon 02Holger Andres Yadaicela CabreraОценок пока нет
- Tarea EcoeДокумент5 страницTarea Ecoeapi-543755536Оценок пока нет
- Carta Poder Margarita IGSSДокумент2 страницыCarta Poder Margarita IGSSJose AlvarezОценок пока нет
- Total A Pagar: ¡Hola! Te Enviamos Tu Recibo Del MesДокумент3 страницыTotal A Pagar: ¡Hola! Te Enviamos Tu Recibo Del MesEduardo ValeraОценок пока нет
- B) Reg Matrimonio 1er Trim 17Документ2 страницыB) Reg Matrimonio 1er Trim 17Johnathan GarciaОценок пока нет
- Depeciacion Contable Marco Antonio RivraДокумент4 страницыDepeciacion Contable Marco Antonio RivraMarco Antonio RiveraОценок пока нет
- Cuestionario de Diagrama de Fases 2Документ2 страницыCuestionario de Diagrama de Fases 2carmenОценок пока нет
- Preguntas Piratas de Silicon Valley (Recuperado)Документ2 страницыPreguntas Piratas de Silicon Valley (Recuperado)ramiro1dnicolasgerva81% (16)
- Rodas Alcantara Zuzety PA2 CCIДокумент8 страницRodas Alcantara Zuzety PA2 CCIZuzety Rodas AlcantaraОценок пока нет
- CorrosionДокумент18 страницCorrosionFrancisco Javier Checho VicencioОценок пока нет
- Procedimiento Perdida Fluidos en CarnicosДокумент4 страницыProcedimiento Perdida Fluidos en CarnicosThelma Martinez - BoquínОценок пока нет
- 9huqWoyQQqYJDGqf 5Af2IAo4KHkD7AOW-Remesa ProtegidaДокумент2 страницы9huqWoyQQqYJDGqf 5Af2IAo4KHkD7AOW-Remesa Protegidalizbethvazquezarellano137Оценок пока нет
- Fase 4. Road Map Proyect 1Документ13 страницFase 4. Road Map Proyect 1Linda LanderoОценок пока нет
- Gestión financiera y contable MipymeДокумент38 страницGestión financiera y contable Mipymeander100% (1)
- Proyecto de NegocioДокумент9 страницProyecto de NegocioRomer R TCОценок пока нет
- Consentimiento Informado Adultos TelepsicoterapiaДокумент3 страницыConsentimiento Informado Adultos TelepsicoterapiaLemus Mancilla Lester Antonio 201513161Оценок пока нет
- Rubrica Evaluacion EnsayoДокумент4 страницыRubrica Evaluacion EnsayoVictor BritoОценок пока нет
- Olivari Li, Harold AdrianДокумент47 страницOlivari Li, Harold AdrianLeslie Falcon LPОценок пока нет
- Modulo III Valorizaciones y Liquidacion de Obras Con LogotipoДокумент49 страницModulo III Valorizaciones y Liquidacion de Obras Con LogotipoEdinson Aguirre Montero100% (2)
- Membrana celular: estructura y funcionesДокумент14 страницMembrana celular: estructura y funcionesAlisson Rojas CastilloОценок пока нет
- Neuro Navegador S7Документ2 страницыNeuro Navegador S7Rosmar Samarith González CarrilloОценок пока нет
- TPCA200Документ7 страницTPCA200Javier cristobal FinocchiОценок пока нет
- Base de DatosДокумент23 страницыBase de DatosAlfredoОценок пока нет
- Cierre MinasДокумент47 страницCierre MinasLuis Gustavo Nolasco León100% (2)
- R450A6X4NAДокумент2 страницыR450A6X4NAJaime RamirezОценок пока нет
- Tríptico Sistema PolíticoДокумент4 страницыTríptico Sistema PolíticoYesenia DiazОценок пока нет
- Curriculum GandelmanДокумент59 страницCurriculum GandelmanmgambettaОценок пока нет
- Estatutos Junta Vecinos Residencial RubíДокумент11 страницEstatutos Junta Vecinos Residencial RubíPapelería Jaimari100% (1)
- El Autor Alfonso Ortega Castro Define A Las Finanzas ComoДокумент3 страницыEl Autor Alfonso Ortega Castro Define A Las Finanzas ComoNanny SuigeneryОценок пока нет
- INFORME TECNICO Reconocimiento Deuda COMBUSTIBLE SGOДокумент2 страницыINFORME TECNICO Reconocimiento Deuda COMBUSTIBLE SGOJohn Chavez Cordova89% (9)
- Adenda #1 Contrato Arq. Wilson Martìnez - Proyecto Mirador de San IgnacioДокумент1 страницаAdenda #1 Contrato Arq. Wilson Martìnez - Proyecto Mirador de San IgnacioWILSON MARTINEZОценок пока нет