Вам также может понравиться
- Manual - Como Projetar e Vender Projetos FTTH No Google Earth PDFДокумент34 страницыManual - Como Projetar e Vender Projetos FTTH No Google Earth PDFValdei JuniorОценок пока нет
- Plano BackupДокумент27 страницPlano BackupVinicius NevesОценок пока нет
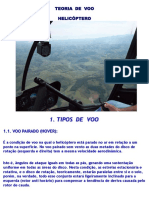
- Teoria de VooДокумент35 страницTeoria de VooHoumem Skandrani100% (1)
- Apostila de ManobrasДокумент26 страницApostila de ManobrasEmerson Juncom100% (1)
- Amplificador StudioR Linha Z SUB H BASS Rev 9 PDFДокумент1 страницаAmplificador StudioR Linha Z SUB H BASS Rev 9 PDFValdei Junior50% (2)
- Treinamento para TratoristasДокумент27 страницTreinamento para TratoristasDyley FreitasОценок пока нет
- Resumão de HelicopterosДокумент50 страницResumão de HelicopterosGiate Instruções Táticas100% (1)
- Simulado para A Banca Da ANAC para HelicópterosДокумент21 страницаSimulado para A Banca Da ANAC para HelicópterosDaniel Tognon100% (4)
- Transmissor MTA FM 10000 PDFДокумент54 страницыTransmissor MTA FM 10000 PDFValdei JuniorОценок пока нет
- Manual de IntegracaoV1.3Документ34 страницыManual de IntegracaoV1.3cruzcvОценок пока нет
- Mo Sprint 407 TceДокумент211 страницMo Sprint 407 Tceleaokamikaze100% (15)
- Padaria Ficha TécnicaДокумент9 страницPadaria Ficha Técnicagilsonfreire50% (2)
- Bambu de Corpo e AlmaДокумент10 страницBambu de Corpo e AlmaFelipy Marinho50% (2)
- A Era Do HipertextoДокумент320 страницA Era Do HipertextoClaudiene Diniz100% (2)
- Infraestrutura e Projeto de RedesДокумент1 страницаInfraestrutura e Projeto de RedesRone MottaОценок пока нет
- Anexo VI Formulário de Solicitação de Vistoria de Microgeração DistribuídaДокумент1 страницаAnexo VI Formulário de Solicitação de Vistoria de Microgeração DistribuídaLuiz Felipe CostaОценок пока нет
- Aerodinâmica Helicóptero 1Документ151 страницаAerodinâmica Helicóptero 1Paula e César BarretoОценок пока нет
- Rpas Multirotores - Teoria de VooДокумент14 страницRpas Multirotores - Teoria de VooRômulo AndradeОценок пока нет
- Instrumento Pau e Bola - Turn BankДокумент7 страницInstrumento Pau e Bola - Turn BankMaycon WilhonОценок пока нет
- Aerodinâmica para Helicópteros Autor Federação Portuguesa de AeromodelismoДокумент19 страницAerodinâmica para Helicópteros Autor Federação Portuguesa de AeromodelismoGabriel LimaОценок пока нет
- 2 Prova de AERДокумент6 страниц2 Prova de AERDouglas DMartinsОценок пока нет
- Manual de HelicopteroДокумент48 страницManual de HelicopteroDailton VasconОценок пока нет
- 10R - Sistemas de HelicópterosДокумент56 страниц10R - Sistemas de HelicópterosGiovanni MedinaОценок пока нет
- Teoria Sobre HelicópteroДокумент34 страницыTeoria Sobre HelicópteroEDAPA PILOTOSОценок пока нет
- CAP 7 HelicesДокумент35 страницCAP 7 HelicesWallace GiorgioОценок пока нет
- 07 HelicesДокумент35 страниц07 HelicesAirton VitorОценок пока нет
- Aula de HelicopteroДокумент23 страницыAula de HelicopteroEvandro OliveiraОценок пока нет
- Helices PDFДокумент35 страницHelices PDFrentabitalОценок пока нет
- Aula 06Документ10 страницAula 06Danilo VarandaОценок пока нет
- Aerodinamica 2Документ24 страницыAerodinamica 2bispojpОценок пока нет
- Aprendendo Sobre Hélice PDFДокумент17 страницAprendendo Sobre Hélice PDFjota_reis100% (1)
- Instrumentos GiroscópicosДокумент4 страницыInstrumentos Giroscópicosapi-19526962Оценок пока нет
- Respostas Teoria de VooДокумент14 страницRespostas Teoria de VooFelipeAraujoОценок пока нет
- Apostila Manobras Elementares PP-AДокумент35 страницApostila Manobras Elementares PP-ATarço Murilo Oliveira LuzОценок пока нет
- AircraftDesign 9 EmpennageGeneralDesign - En.ptДокумент16 страницAircraftDesign 9 EmpennageGeneralDesign - En.ptJucélia NascimentoОценок пока нет
- Aula 05Документ4 страницыAula 05Danilo VarandaОценок пока нет
- Mo Ngd30e eДокумент19 страницMo Ngd30e eBob Medeiros100% (1)
- 1 Prova de AERДокумент4 страницы1 Prova de AERDouglas DMartinsОценок пока нет
- Teoria Voo PDF HelicopteroДокумент32 страницыTeoria Voo PDF HelicopteroFelipe VarandaОценок пока нет
- Aula 07Документ8 страницAula 07Danilo VarandaОценок пока нет
- 30 Questões de PNA - PropulsãoДокумент13 страниц30 Questões de PNA - PropulsãoRafael SouzaОценок пока нет
- Aeronaves de Asas RotativasДокумент84 страницыAeronaves de Asas RotativasAdriano Freire Silva100% (1)
- Capitulo 13 Aerodinamica HELICOPTEROSДокумент22 страницыCapitulo 13 Aerodinamica HELICOPTEROSAgnaldo Timoteo MinaoОценок пока нет
- Projeto Aerodinâmico de Hélices: Prof. Dr. José Eduardo Mautone Barros - UFMGДокумент24 страницыProjeto Aerodinâmico de Hélices: Prof. Dr. José Eduardo Mautone Barros - UFMGAndré Franco Rios CatapaniОценок пока нет
- Estudo Livro Do EtkinДокумент15 страницEstudo Livro Do Etkintiagovon97Оценок пока нет
- Aula Motores, Propulsores e Integraà à o - 2aulasДокумент105 страницAula Motores, Propulsores e Integraà à o - 2aulasLeonardo Lopes de OliveiraОценок пока нет
- Teoria VooДокумент55 страницTeoria VooEduardo RibeiroОценок пока нет
- Helices de Aeronaves - Vol 1Документ66 страницHelices de Aeronaves - Vol 1Alexandre VilarОценок пока нет
- Teoria de Voo - Helicóptero - (WWW - Canalpiloto.com - BR)Документ31 страницаTeoria de Voo - Helicóptero - (WWW - Canalpiloto.com - BR)Breno SantanaОценок пока нет
- Apostila de Teoria de Vôo HelicópteroДокумент31 страницаApostila de Teoria de Vôo Helicópteroabelpramos100% (1)
- Forças e MovimentosДокумент41 страницаForças e MovimentosDavi GoyannaОценок пока нет
- Questoes Mec Voo Possivel Bizu 26-04-23Документ8 страницQuestoes Mec Voo Possivel Bizu 26-04-23Marcus Vinícius Bernardes FerreiraОценок пока нет
- T.V. Cap. 07 Faro Comandos de VooДокумент19 страницT.V. Cap. 07 Faro Comandos de VooE N MОценок пока нет
- Apostila de Teoria de Vôo de HelicópteroДокумент34 страницыApostila de Teoria de Vôo de HelicópteroRafaell DalpraОценок пока нет
- Teoria de Voo H em PPT (Araujo)Документ84 страницыTeoria de Voo H em PPT (Araujo)Bruno Avellar100% (4)
- Os Fatores Que Influenciam A Eficiência Da HéliceДокумент10 страницOs Fatores Que Influenciam A Eficiência Da HéliceFlavio Mesquita-Aircraft MechanicОценок пока нет
- A Aerodinâmica Dos AeromodelosДокумент10 страницA Aerodinâmica Dos Aeromodelosmsd_hmsd1633Оценок пока нет
- Aula 16Документ13 страницAula 16Moisés Contreiras AdolfoОценок пока нет
- Simulado 1Документ3 страницыSimulado 1Marinaldo MeloОценок пока нет
- Questionário de HelicópteroДокумент59 страницQuestionário de HelicópteroRicardo da SilvaОценок пока нет
- Questionário - 402 Perguntas Sobre Helicopteros - (WWW - Canalpiloto.com - BR)Документ22 страницыQuestionário - 402 Perguntas Sobre Helicopteros - (WWW - Canalpiloto.com - BR)dududmduduОценок пока нет
- Conceitos de Controle de VooДокумент40 страницConceitos de Controle de VoothallesnetОценок пока нет
- CAPÍTULO 6 Tec QLДокумент10 страницCAPÍTULO 6 Tec QLlemoscamboja28121975Оценок пока нет
- KF 850 Três Vias (Parte I) PDFДокумент3 страницыKF 850 Três Vias (Parte I) PDFValdei JuniorОценок пока нет
- 18 MTL (Parte 2)Документ1 страница18 MTL (Parte 2)Valdei JuniorОценок пока нет
- 1 - Fernando Belchior - Marcenaria Fina - Youtube - 20170921 - Introducao A Tupia Eletrica PortatilДокумент14 страниц1 - Fernando Belchior - Marcenaria Fina - Youtube - 20170921 - Introducao A Tupia Eletrica PortatilValdei JuniorОценок пока нет
- cv32 MDCДокумент2 страницыcv32 MDCEvania Alfredo FranciscoОценок пока нет
- Planilha Boletos Vencidos Excel v1Документ37 страницPlanilha Boletos Vencidos Excel v1Thiago Marasca MouraОценок пока нет
- IPOG - A Importância Das Técnicas Ergonômicas No Design de Interiores PDFДокумент17 страницIPOG - A Importância Das Técnicas Ergonômicas No Design de Interiores PDFPatrícia Tiemi OsakuОценок пока нет
- Desabilitando o Touchpad e Habilitando Trackpoint Do X1 e T430sДокумент11 страницDesabilitando o Touchpad e Habilitando Trackpoint Do X1 e T430salexandre.oneill2479Оценок пока нет
- Concursos 1194 Ifmaadm2014 Docgerais 1194 Edital0012014 Abertura PDFДокумент42 страницыConcursos 1194 Ifmaadm2014 Docgerais 1194 Edital0012014 Abertura PDFRobson PonteОценок пока нет
- Ged 22Документ42 страницыGed 22Mateus HenriqueОценок пока нет
- Carta Do Sindico - 1 AnoДокумент2 страницыCarta Do Sindico - 1 AnoPatryckson Marinho SantosОценок пока нет
- Planner Modelo 2Документ14 страницPlanner Modelo 2Roberta SilvaОценок пока нет
- Cálculo de Impostos-Rev-9Документ6 страницCálculo de Impostos-Rev-9Gualberto Pablo SousaОценок пока нет
- Modelo de Trabalho EtepДокумент3 страницыModelo de Trabalho EtepfelipesoteОценок пока нет
- Circuito Impresso PDFДокумент13 страницCircuito Impresso PDFAsrRefri-maqОценок пока нет
- Tutorial de Uso JAHSHAKA 2.0Документ27 страницTutorial de Uso JAHSHAKA 2.0octavianijrОценок пока нет
- Catálogo Empalux 2019 BaixaДокумент24 страницыCatálogo Empalux 2019 BaixaJunior GonçalvesОценок пока нет
- Curriculum RailtonДокумент2 страницыCurriculum RailtonRailton De Andrade AndradeОценок пока нет
- A Historia Da Escultura 1 - As Ferramentas Re-Escrito - 3 RevisadoДокумент14 страницA Historia Da Escultura 1 - As Ferramentas Re-Escrito - 3 RevisadoFrazão AndréaОценок пока нет
- (Apostila) Sistemas Realimentados - UFSCДокумент43 страницы(Apostila) Sistemas Realimentados - UFSCEduardo BandeiraОценок пока нет
- Caso Prático - Eco 1 FdulДокумент2 страницыCaso Prático - Eco 1 FdulInês MartinsОценок пока нет
- NR 18 - Tetos Falsos e Placas de GessoДокумент2 страницыNR 18 - Tetos Falsos e Placas de GessoCPSSTОценок пока нет
- Afiliados PDFДокумент48 страницAfiliados PDFbolinhaicmОценок пока нет
- Gestão Da Qualidade Através Da Metodologia QRQCДокумент7 страницGestão Da Qualidade Através Da Metodologia QRQCsassi147Оценок пока нет
- Exercicios Tetra - Artes UEMДокумент2 страницыExercicios Tetra - Artes UEMGuilherme Alves BombaОценок пока нет