Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Principles of Form and DesignДокумент350 страницPrinciples of Form and DesignNora Maloku100% (8)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
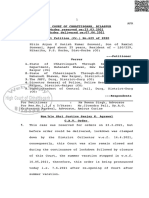
- COVID19SupremeCourtorder 12052021 1Документ15 страницCOVID19SupremeCourtorder 12052021 1Tushar GhoshОценок пока нет
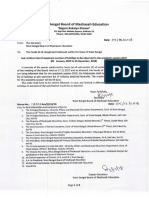
- Madrasah Teacher WB ROPA 2019 DMEДокумент13 страницMadrasah Teacher WB ROPA 2019 DMETushar GhoshОценок пока нет
- WBBME Holiday List 2021Документ1 страницаWBBME Holiday List 2021Tushar GhoshОценок пока нет
- WP (CR) 629 20 (07.06.21)Документ23 страницыWP (CR) 629 20 (07.06.21)Tushar GhoshОценок пока нет
- July or 2013Документ165 страницJuly or 2013Tushar GhoshОценок пока нет
- Net Part Test - 10 - Part-AДокумент11 страницNet Part Test - 10 - Part-ATushar GhoshОценок пока нет
- Content Table: 11 PhysicsДокумент1 страницаContent Table: 11 PhysicsTushar GhoshОценок пока нет
- NVS PGT Physics 19 Sep Q PaperДокумент42 страницыNVS PGT Physics 19 Sep Q PaperTushar GhoshОценок пока нет
- Sri Jagannath Temple at Puri - An Architectural Study: K.K. PatnaikДокумент3 страницыSri Jagannath Temple at Puri - An Architectural Study: K.K. PatnaikTushar GhoshОценок пока нет
- ( )Документ50 страниц( )Tushar GhoshОценок пока нет
- Gravitional Force and Kepler's Motion: By: Amit RanjanДокумент54 страницыGravitional Force and Kepler's Motion: By: Amit RanjanTushar GhoshОценок пока нет
- WBBME Holiday List 2019Документ3 страницыWBBME Holiday List 2019Tushar GhoshОценок пока нет
- Problems On: /physicshub111 Special FunctionsДокумент1 страницаProblems On: /physicshub111 Special FunctionsTushar GhoshОценок пока нет
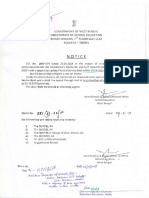
- Public Notice Dated: 09.10.2019: On-Line Submission of Application Form Successful Final Transaction of FeeДокумент1 страницаPublic Notice Dated: 09.10.2019: On-Line Submission of Application Form Successful Final Transaction of FeeTushar GhoshОценок пока нет
- Orthogonal Curvilinear Coordinates: Department of Aerospace and Mechanical EngineeringДокумент5 страницOrthogonal Curvilinear Coordinates: Department of Aerospace and Mechanical EngineeringTushar GhoshОценок пока нет
- E Service BookДокумент1 страницаE Service BookTushar GhoshОценок пока нет
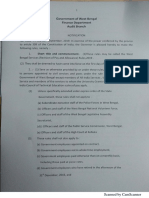
- Scanned by CamscannerДокумент6 страницScanned by CamscannerTushar GhoshОценок пока нет
- Ropa 19Документ19 страницRopa 19Tushar GhoshОценок пока нет
- Atomic and Molecular Physics SolutionsДокумент18 страницAtomic and Molecular Physics SolutionsTushar GhoshОценок пока нет
- 31.8.2019 (BanglaJobGuide - Blogspot.com)Документ11 страниц31.8.2019 (BanglaJobGuide - Blogspot.com)Tushar GhoshОценок пока нет
- Curvilinear 1 PDFДокумент8 страницCurvilinear 1 PDFTushar GhoshОценок пока нет
- EE5143 Tutorial1Документ5 страницEE5143 Tutorial1Sayan Rudra PalОценок пока нет
- Theory Notes of Newton's Laws of Motion For NEET & IIT 2017Документ18 страницTheory Notes of Newton's Laws of Motion For NEET & IIT 2017umved singh yadav90% (10)
- The Progress of Consolidation in A Clay Layer Increasing-Gibson PDFДокумент12 страницThe Progress of Consolidation in A Clay Layer Increasing-Gibson PDFAnonymous GnfGTwОценок пока нет
- Solved Problems - Continuous Random VariablesДокумент4 страницыSolved Problems - Continuous Random VariablesDahanyakage WickramathungaОценок пока нет
- R12 Oracle Hrms Implement and Use Fastformula: DurationДокумент2 страницыR12 Oracle Hrms Implement and Use Fastformula: DurationAlochiousDassОценок пока нет
- Resolução Do Capítulo 4 - Equilíbrio de Corpos Rígidos PDFДокумент231 страницаResolução Do Capítulo 4 - Equilíbrio de Corpos Rígidos PDFMalik PassosОценок пока нет
- PPRF Complete Research Report PDFДокумент53 страницыPPRF Complete Research Report PDFGuillermo Bautista FuerteОценок пока нет
- Tax Evasion PDFДокумент34 страницыTax Evasion PDFCristinaZLОценок пока нет
- How To Calculate P90 (Or Other PXX) PV Energy Yield Estimates - SolargisДокумент8 страницHow To Calculate P90 (Or Other PXX) PV Energy Yield Estimates - SolargisgoyalmanojОценок пока нет
- Application of Conformal Mapping For ElectromagneticДокумент21 страницаApplication of Conformal Mapping For ElectromagneticBrown MountainОценок пока нет
- CA-course FileДокумент12 страницCA-course FileSivagami ManiОценок пока нет
- RM 4Документ37 страницRM 4RHEALYN GEMOTOОценок пока нет
- Prototyping Approach To Neuro-Fuzzy Speed Control of Trapezoidal Brushless DC MotorДокумент6 страницPrototyping Approach To Neuro-Fuzzy Speed Control of Trapezoidal Brushless DC MotorJournal of ComputingОценок пока нет
- The Undiscovered Self - Carl Gustav JungДокумент25 страницThe Undiscovered Self - Carl Gustav JungYusuf IrawanОценок пока нет
- Quantum Chemical Descriptors in QSAR QSPR StudiesДокумент17 страницQuantum Chemical Descriptors in QSAR QSPR StudiesCarlos Alberto Bayona LópezОценок пока нет
- Engineering Mathematics1 2015 PDFДокумент24 страницыEngineering Mathematics1 2015 PDFsenyonjo emmaОценок пока нет
- Solving Word Problems Involving Exponential FunctionsДокумент15 страницSolving Word Problems Involving Exponential FunctionsSherwin Jay Bentazar100% (1)
- PPAP ChecklistДокумент4 страницыPPAP ChecklistHirbod HirmandОценок пока нет
- T M 34794 Representing Tenths Differentiated Activity Sheet - Ver - 1Документ7 страницT M 34794 Representing Tenths Differentiated Activity Sheet - Ver - 1Thieu LeОценок пока нет
- Data Structures and Algorithms in Java 6th Edition 201 270Документ70 страницData Structures and Algorithms in Java 6th Edition 201 270longle18704Оценок пока нет
- AI CLIPS TutorialДокумент30 страницAI CLIPS Tutorialintonation iОценок пока нет
- RKB Proper Lubricant Selection For Rolling Bearing Applications PDFДокумент8 страницRKB Proper Lubricant Selection For Rolling Bearing Applications PDFJako MishyОценок пока нет
- Cs7593 - Data Structures With Python: Department of Computer Technology Anna University - MIT CampusДокумент37 страницCs7593 - Data Structures With Python: Department of Computer Technology Anna University - MIT CampusFathima JОценок пока нет
- Elementary Quantitative Methods QMI1500 Semesters 1 and 2: Tutorial Letter 101/3/2021Документ26 страницElementary Quantitative Methods QMI1500 Semesters 1 and 2: Tutorial Letter 101/3/2021natashasiphokazi2015Оценок пока нет
- CASIO fx-5800P GCDДокумент2 страницыCASIO fx-5800P GCDlucasОценок пока нет
- Factorial Program in C Using FunctionДокумент4 страницыFactorial Program in C Using FunctionInd KanakОценок пока нет
- G and M Programming For Mills ManualДокумент98 страницG and M Programming For Mills ManualyendiОценок пока нет
- Maths Y8 4Документ2 страницыMaths Y8 4s100% (1)
- Descriptive STatistics For Qualitative DataДокумент34 страницыDescriptive STatistics For Qualitative DataMwanjala GasambiОценок пока нет