Вам также может понравиться
- Estudio de Impacto Vial - Terminal Terrestre PucallpaДокумент826 страницEstudio de Impacto Vial - Terminal Terrestre PucallpaJonas Kvno BeckerОценок пока нет
- Manual Vissim 10 Part 1Документ345 страницManual Vissim 10 Part 1Jhair Linares100% (3)
- Curso Aimsun TMSA V.01.02 PDFДокумент70 страницCurso Aimsun TMSA V.01.02 PDFJosé JaramilloОценок пока нет
- Expansión y Actualización de Matrices Origen /destinoДокумент26 страницExpansión y Actualización de Matrices Origen /destinoEdward RinconОценок пока нет
- Tesis Modelacion en Vissim 5.3Документ94 страницыTesis Modelacion en Vissim 5.3ALEXIS SOYER100% (1)
- Transportes Clase 29 SynchroДокумент37 страницTransportes Clase 29 SynchroKay Sanchez Llancari100% (1)
- VISSIM 5.40 - Manual Del UsarioДокумент814 страницVISSIM 5.40 - Manual Del UsarioJimboDos0% (1)
- 2020-08 - 08guía de VissimДокумент37 страниц2020-08 - 08guía de VissimDaniel CanteОценок пока нет
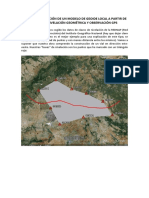
- Creación Modelo de Geoide PDFДокумент20 страницCreación Modelo de Geoide PDFvethoОценок пока нет
- Introducción Al Software TransCADДокумент21 страницаIntroducción Al Software TransCADFelipe100% (1)
- Apuntes Curso Visum Básico 08Документ45 страницApuntes Curso Visum Básico 08Alexandra Cabuya TorresОценок пока нет
- Analisis de Costos UnitariosДокумент65 страницAnalisis de Costos UnitariosVictor Carranza Toro100% (1)
- Capítulo 1 - Synchro 9Документ4 страницыCapítulo 1 - Synchro 9Darío100% (1)
- AIMSUN Software Simulacion - Ingenieria de TransitoДокумент27 страницAIMSUN Software Simulacion - Ingenieria de TransitoAlex SanchezОценок пока нет
- Calculo de Nivel de Servicio de CarreteraДокумент10 страницCalculo de Nivel de Servicio de CarreteraSamanta GarofaloОценок пока нет
- EstudiosdemandaTransportePúblico - Frecuencia y Ocupacion Visual - Ascenso y Descenso PDFДокумент27 страницEstudiosdemandaTransportePúblico - Frecuencia y Ocupacion Visual - Ascenso y Descenso PDFMaria K Gámez100% (2)
- Tutoria VISSIMДокумент4 страницыTutoria VISSIMSaul Ramon Vergel PenarandaОценок пока нет
- Informe Proyecto Transito SynchroДокумент23 страницыInforme Proyecto Transito SynchroDiegoGomezAyala0% (1)
- Ejemplo Cálculo de Frecuencias y Flota de BusesДокумент8 страницEjemplo Cálculo de Frecuencias y Flota de BusesFelipe Alvarez AcevedoОценок пока нет
- Sidra IntersectionДокумент19 страницSidra IntersectionWillian Luza100% (1)
- 4.3 Software para La Microsimulación Grupo 6Документ32 страницы4.3 Software para La Microsimulación Grupo 6Jaime Calderon100% (1)
- Semaforos VehicularesДокумент43 страницыSemaforos VehicularesDIEGOОценок пока нет
- Taller de Transito NT2Документ20 страницTaller de Transito NT2TottaTocarrunchoОценок пока нет
- Fujo Vehicular - Modelos Logarítmico y Exponencial PDFДокумент3 страницыFujo Vehicular - Modelos Logarítmico y Exponencial PDFronald100% (1)
- Manual Basico de TransCADДокумент44 страницыManual Basico de TransCADHugo Leonidas Acosta Grandez100% (2)
- CP 1 M1T1Документ9 страницCP 1 M1T1Wendy0% (1)
- Capitulo 9 HCM 2010Документ44 страницыCapitulo 9 HCM 2010Alexandra Rosales HuanéОценок пока нет
- Programa para Calculadora Factor CombinadoДокумент2 страницыPrograma para Calculadora Factor CombinadoHugo Chavez100% (1)
- Capítulo 17 HCM 2010Документ3 страницыCapítulo 17 HCM 2010James ChОценок пока нет
- Guia Estudio Velocidad Recorrido Metodo Vehiculo de Prueba y Metodo Placas ISem 2015Документ20 страницGuia Estudio Velocidad Recorrido Metodo Vehiculo de Prueba y Metodo Placas ISem 2015azaly suárezОценок пока нет
- PTV Vissim - EspañolДокумент35 страницPTV Vissim - EspañolAngel Pozo EstradaОценок пока нет
- Transcad Curso Final General123Документ109 страницTranscad Curso Final General123Laitoned100% (1)
- Ejercicios Resueltos TransitoДокумент10 страницEjercicios Resueltos TransitoMarcelo velasquez romeroОценок пока нет
- Estudio de Tráfico FinalДокумент73 страницыEstudio de Tráfico FinalHugoOrtizОценок пока нет
- Principio de WardropДокумент23 страницыPrincipio de WardropwilliamsОценок пока нет
- Conteo de PeatonesДокумент4 страницыConteo de PeatonesLuisa F. NovoaОценок пока нет
- Matrices de Conflictos y Tiempos IntermediosДокумент22 страницыMatrices de Conflictos y Tiempos IntermediosKevin Manuel Runza LombanaОценок пока нет
- Aplicación de Synchro 7Документ10 страницAplicación de Synchro 7Fabiola CanalesОценок пока нет
- Fichas de Capacidad y Nivel de ServicioДокумент2 страницыFichas de Capacidad y Nivel de ServicioCarlos Cordova FacundoОценок пока нет
- Modelación Del Trafico Vehicular Con El Software PTV Vissim Tramo Bomba El Gallo - Bomba El AmparoДокумент131 страницаModelación Del Trafico Vehicular Con El Software PTV Vissim Tramo Bomba El Gallo - Bomba El AmparoJhonny Fajardo Gutierrez100% (1)
- Manual de Aimsun - MoyanoДокумент52 страницыManual de Aimsun - MoyanoAndres Placencio100% (1)
- Synchro-Introduccion Basica1 PDFДокумент39 страницSynchro-Introduccion Basica1 PDFKITARO2014Оценок пока нет
- Tomo I, II, III, y V Del ManualДокумент2 страницыTomo I, II, III, y V Del ManualDarwin ForeroОценок пока нет
- Demoras. Ing TransitoДокумент61 страницаDemoras. Ing TransitoTOPOGRAFIA 1. NURR-ULAОценок пока нет
- Arboleda German - Vías UrbanasДокумент30 страницArboleda German - Vías UrbanasCesarJaramillo100% (1)
- Transito. Analisis de Flujo VehicularДокумент12 страницTransito. Analisis de Flujo VehicularEdwinHurtadoОценок пока нет
- Capitulo 6 Estudios Ingenieria de Tránsito 01-12Документ92 страницыCapitulo 6 Estudios Ingenieria de Tránsito 01-12NicolásRave100% (2)
- Taller Modelación Con SYNCHROДокумент48 страницTaller Modelación Con SYNCHROJailer RodríguezОценок пока нет
- Manual de Planeación y Diseño para La Administración Del Tránsito y Del Transporte - Tomo 2 PDFДокумент430 страницManual de Planeación y Diseño para La Administración Del Tránsito y Del Transporte - Tomo 2 PDFecespedesl6Оценок пока нет
- TIC00197 CH 516Документ275 страницTIC00197 CH 516Avalos Cordova DantyОценок пока нет
- 2 Teoria Flujo VehicularДокумент65 страниц2 Teoria Flujo Vehicularstefandre67% (3)
- Manual SidraДокумент8 страницManual Sidrakarina100% (1)
- Clase 5Документ2 страницыClase 5Yanul Leonardo PachecoОценок пока нет
- PDF Manual Vissim 10 Part 1 CompressДокумент118 страницPDF Manual Vissim 10 Part 1 Compressalejandraoy9Оценок пока нет
- Estudio de Frecuencia y Ocupacion VisualДокумент11 страницEstudio de Frecuencia y Ocupacion VisualSebastian Rodriguez100% (1)
- Diseño Geometrico - Alineamiento HorizontalДокумент60 страницDiseño Geometrico - Alineamiento HorizontalVictor Oliva CornejoОценок пока нет
- Manual Vissim - 8.0Документ6 страницManual Vissim - 8.0Carlos Alvarado SanabriaОценок пока нет
- Proyecto Bimestral b1Документ43 страницыProyecto Bimestral b1yossy benitezОценок пока нет
- Trabajo de Conteo (Collasuyo)Документ27 страницTrabajo de Conteo (Collasuyo)deynardОценок пока нет
- Resumen Especificaciones INVIASДокумент26 страницResumen Especificaciones INVIASCarlos Alvarado SanabriaОценок пока нет
- Criterios de Diseño Geométrico INVIASДокумент29 страницCriterios de Diseño Geométrico INVIASCarlos Alvarado SanabriaОценок пока нет
- Manual Vissim - 8.0Документ6 страницManual Vissim - 8.0Carlos Alvarado SanabriaОценок пока нет
- Manual VissimДокумент5 страницManual VissimCarlos Alvarado SanabriaОценок пока нет
- Madrid. RotondasДокумент8 страницMadrid. RotondasMarcos González del PozoОценок пока нет
- Configuracion Offset 3dДокумент6 страницConfiguracion Offset 3dCarlos Alvarado SanabriaОценок пока нет
- Manual Vissim 7Документ5 страницManual Vissim 7Carlos Alvarado SanabriaОценок пока нет
- Tanques Septicos EPMДокумент6 страницTanques Septicos EPMCarlos Alvarado SanabriaОценок пока нет
- Crear Objetos en 3DДокумент4 страницыCrear Objetos en 3DHarinhol MFОценок пока нет
- Manual Pozos SepticosДокумент20 страницManual Pozos Septicosluigi1685100% (1)
- Trabajo Rio La Vega y Río PomecaДокумент18 страницTrabajo Rio La Vega y Río PomecaCarlos Alvarado SanabriaОценок пока нет
- Certificación Sanitaria y Fitosanitaria de Productos Vegetales Destinados A La ExportaciónДокумент37 страницCertificación Sanitaria y Fitosanitaria de Productos Vegetales Destinados A La ExportaciónRandy RosalesОценок пока нет
- Tejiendo de Otro Modo: Feminismo, Epistemología y Apuestas Descoloniales en Abya YalaДокумент484 страницыTejiendo de Otro Modo: Feminismo, Epistemología y Apuestas Descoloniales en Abya Yalagolondrina100% (7)
- Flujograma AcreditacionДокумент8 страницFlujograma AcreditacionRandykiss RandyОценок пока нет
- La TutelaДокумент12 страницLa TutelaMax Paredes SamanamudОценок пока нет
- Leyes Del Poder Popular en La República Bolivariana de VenezuelaДокумент3 страницыLeyes Del Poder Popular en La República Bolivariana de VenezuelaThania IbarraОценок пока нет
- Plan Estrategico Juventud 2005-2015Документ19 страницPlan Estrategico Juventud 2005-2015Liz GarcíaОценок пока нет
- Para Eleccion Talleres Formulario para LiceosДокумент1 страницаPara Eleccion Talleres Formulario para LiceosnandouferОценок пока нет
- Limites Maritimos de La Republica DomincanaДокумент4 страницыLimites Maritimos de La Republica DomincanaSpencerОценок пока нет
- Exposicion Biografia Andres Eloy BlancoДокумент2 страницыExposicion Biografia Andres Eloy BlancoAlexandra Fitdancer100% (1)
- Lazarillo 1Документ119 страницLazarillo 1teresa_orozco_24Оценок пока нет
- 3er Examen Legislacion Darwin Sasari ChoquenairaДокумент11 страниц3er Examen Legislacion Darwin Sasari ChoquenairaDarwinОценок пока нет
- Etica y Economia ArticuloДокумент2 страницыEtica y Economia ArticuloHEBER JARED PAREDES MU�OZОценок пока нет
- Reglamento de Viaticos Del Sector PublicoДокумент8 страницReglamento de Viaticos Del Sector PublicoJohanna Murillo VascoОценок пока нет
- Personajes de La RevolucionДокумент11 страницPersonajes de La RevolucionNacho PioquintoОценок пока нет
- Actividades T2 - 4º PDFДокумент3 страницыActividades T2 - 4º PDFmciaboteОценок пока нет
- Exponer ImplementacionДокумент12 страницExponer ImplementacionConsueloОценок пока нет
- Estructura de La Democracia - CerroniДокумент10 страницEstructura de La Democracia - CerroniLimber José Mejía BarriosОценок пока нет
- Fumaderos de Opio en TijuanaДокумент11 страницFumaderos de Opio en TijuanaGabriel Ese ErreОценок пока нет
- NÓMINA PrimariaДокумент20 страницNÓMINA PrimariaMalamys RapОценок пока нет
- Malcolm Deas EL Conflicto Colombiano en Perspectiva PDFДокумент12 страницMalcolm Deas EL Conflicto Colombiano en Perspectiva PDFAna Isabel RuizОценок пока нет
- Demanda de Desalojo Por Ocupacion PrecariaДокумент14 страницDemanda de Desalojo Por Ocupacion Precariaalberto zuñeОценок пока нет
- CASUÍSTICASДокумент2 страницыCASUÍSTICASMelissa Andrea Jara PalaciosОценок пока нет
- Adecuacion de La Disp Fiscal 1641-2012Документ10 страницAdecuacion de La Disp Fiscal 1641-2012Milagros Zaida Pacuri MelendezОценок пока нет
- Administracion y Gestion PublicaДокумент844 страницыAdministracion y Gestion PublicaGuía Estudiantil100% (2)
- Formato #07 - PNP - Polarizadas PDFДокумент1 страницаFormato #07 - PNP - Polarizadas PDFlestherОценок пока нет
- Redaccion 123Документ8 страницRedaccion 123Victor YatОценок пока нет
- Examen Unidad 1 Mercadeo Internacional 2Документ7 страницExamen Unidad 1 Mercadeo Internacional 2Leonardo Antonio Mosquera100% (1)
- Testa Mario Pensar en SaludДокумент11 страницTesta Mario Pensar en SaludXiomeli Cordero de MoralesОценок пока нет
- Qué Es La Organización TécnicaДокумент3 страницыQué Es La Organización TécnicaJoelin Sanchez100% (1)
- Resumen de La Sociedad Anonima (Esteban Salazar)Документ3 страницыResumen de La Sociedad Anonima (Esteban Salazar)Esteban Salazar100% (1)