Вам также может понравиться
- Chapter4 ProcessorДокумент143 страницыChapter4 ProcessorZhuan WuОценок пока нет
- Multicycle DatapathДокумент23 страницыMulticycle DatapathGIRINATH RОценок пока нет
- Chapter4 Processor PDFДокумент149 страницChapter4 Processor PDFÁi NguyễnОценок пока нет
- Computer Architecture: Single-Cycle ImplementationДокумент14 страницComputer Architecture: Single-Cycle ImplementationElisée NdjabuОценок пока нет
- Cpu - Memory (Disk Drives, DRAM, SRAM, CD) - Input (Mouse, Keyboard) - Output (Display, Printer) - Network - SoftwareДокумент14 страницCpu - Memory (Disk Drives, DRAM, SRAM, CD) - Input (Mouse, Keyboard) - Output (Display, Printer) - Network - Softwareanand_duraiswamyОценок пока нет
- Minmin 2Документ23 страницыMinmin 2Mennah Tullah SamehОценок пока нет
- Chapter 4 The Processor 2 4.4Документ17 страницChapter 4 The Processor 2 4.4Anam GhaffarОценок пока нет
- The Final Datapath: Add M U XДокумент32 страницыThe Final Datapath: Add M U XRizwanAliОценок пока нет
- Multicycle RISCVДокумент20 страницMulticycle RISCVJenia GershikovОценок пока нет
- Computer Architecture Test 1Документ6 страницComputer Architecture Test 1gbland100% (1)
- Minmin 3Документ18 страницMinmin 3Mennah Tullah SamehОценок пока нет
- Minmin 4Документ10 страницMinmin 4Mennah Tullah SamehОценок пока нет
- CS 251, Winter 2019, Assignment 3.0.1: 3% of Course MarkДокумент6 страницCS 251, Winter 2019, Assignment 3.0.1: 3% of Course MarkAjay PatelОценок пока нет
- 2004 Spring Exam2Документ8 страниц2004 Spring Exam2Mohammad NizamОценок пока нет
- 6 MultiCycleДокумент66 страниц6 MultiCycleisaacopineОценок пока нет
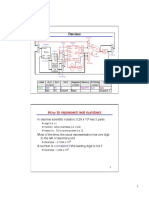
- Review: How To Represent Real NumbersДокумент9 страницReview: How To Represent Real NumbersRabab ElkomyОценок пока нет
- Coa AssignmentДокумент4 страницыCoa Assignmentray banОценок пока нет
- Lecture 12Документ34 страницыLecture 12venkateshakula042004Оценок пока нет
- LEC08Документ52 страницыLEC08Zain AliОценок пока нет
- COA - 2 - Multiplexer - Basic Computer Working - Instructions - Arithmetic InstructionsДокумент5 страницCOA - 2 - Multiplexer - Basic Computer Working - Instructions - Arithmetic Instructionsanvitasrivas3025Оценок пока нет
- 2005 Spring Exam2 SolДокумент6 страниц2005 Spring Exam2 SolNipun HarshaОценок пока нет
- Multi Cycle DatapathДокумент23 страницыMulti Cycle Datapath2022ht80586Оценок пока нет
- L7 Single Cycle DPДокумент24 страницыL7 Single Cycle DPKent RongavillaОценок пока нет
- Lect 07 Processordesign PDFДокумент55 страницLect 07 Processordesign PDFMo LêОценок пока нет
- HW2 Carch 2023 SolДокумент7 страницHW2 Carch 2023 SolSXОценок пока нет
- A Single-Cycle MIPS ProcessorДокумент13 страницA Single-Cycle MIPS ProcessorlittlechoОценок пока нет
- CS104: Computer Organization: 30 March, 2020Документ31 страницаCS104: Computer Organization: 30 March, 2020Om PrakashОценок пока нет
- MIPS Multi-Cycle DatapathДокумент36 страницMIPS Multi-Cycle DatapathModaser SadatОценок пока нет
- Chap4.1.SingleClockCycle VTPДокумент4 страницыChap4.1.SingleClockCycle VTPhieu.nguyenhcmutk21Оценок пока нет
- Preparation For MidtermДокумент30 страницPreparation For MidtermTОценок пока нет
- CS 162 Computer Architecture Lecture 3: Pipelining Contd.: Instructor: L.N. BhuyanДокумент21 страницаCS 162 Computer Architecture Lecture 3: Pipelining Contd.: Instructor: L.N. Bhuyanعلي سعدهاشمОценок пока нет
- Aula Ch4 1Документ39 страницAula Ch4 1Charles ChavesОценок пока нет
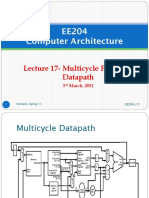
- Lec17-Multicycle Processor DatapathДокумент21 страницаLec17-Multicycle Processor DatapathAnonymous tbEoUfvОценок пока нет
- MIPS MC ExtendedДокумент20 страницMIPS MC ExtendedVimoli MehtaОценок пока нет
- An Introduction To INTEL 8085 Microprocessor: By:Ravindra Nadh.V, Assistant Professor, GST, BangaloreДокумент35 страницAn Introduction To INTEL 8085 Microprocessor: By:Ravindra Nadh.V, Assistant Professor, GST, BangaloreVasudev Rao KonjetiОценок пока нет
- A6 SolutionДокумент5 страницA6 Solutionmasab aneesОценок пока нет
- w17 Cs251 Assignment 4Документ8 страницw17 Cs251 Assignment 4Harsh AminОценок пока нет
- MIPS Datapath IF DecoderДокумент14 страницMIPS Datapath IF DecoderMartin Fuentes AcostaОценок пока нет
- Chapter 1: Introduction To HCS12/MC9S12 The HCS12 Microcontroller Han-Way Huang Minnesota State University, Mankato September 2009Документ52 страницыChapter 1: Introduction To HCS12/MC9S12 The HCS12 Microcontroller Han-Way Huang Minnesota State University, Mankato September 2009mohaiyedinОценок пока нет
- Pipeline Datapaths: Pipelined Datapath and ControlДокумент16 страницPipeline Datapaths: Pipelined Datapath and ControlSC Priyadarshani de SilvaОценок пока нет
- 8085 ArchitectureДокумент26 страниц8085 ArchitectureLukeОценок пока нет
- c6x Assembly Programming 1Документ20 страницc6x Assembly Programming 1Ernesto NadlorОценок пока нет
- 4 - SingleCycle ImplementationДокумент59 страниц4 - SingleCycle Implementationf20201962Оценок пока нет
- System BusДокумент20 страницSystem BusshyamОценок пока нет
- Lecture 8Документ26 страницLecture 8Pranav ChauhanОценок пока нет
- Controlling A Pipelined DatapathДокумент17 страницControlling A Pipelined DatapathAlexander TaylorОценок пока нет
- Fundamentals of Microprocessor 01Документ35 страницFundamentals of Microprocessor 01Antony Chacha GatiОценок пока нет
- This DatapathДокумент15 страницThis DatapathSadaf HameedОценок пока нет
- Chapter 2Документ3 страницыChapter 2ATHIRA V RОценок пока нет
- Multicycle Datapath PDFДокумент22 страницыMulticycle Datapath PDFShivam KhandelwalОценок пока нет
- Processor DP ControlДокумент44 страницыProcessor DP ControlNonex IstantОценок пока нет
- Single Cycle MipsДокумент25 страницSingle Cycle MipsRajendraPrasadSahuОценок пока нет
- Jan. 2011 Computer Architecture, The Arithmetic/Logic Unit Slide 1Документ94 страницыJan. 2011 Computer Architecture, The Arithmetic/Logic Unit Slide 1adilОценок пока нет
- Lab 7 PDFДокумент9 страницLab 7 PDFLeonardo FuchsОценок пока нет
- Register and Its OperationsДокумент56 страницRegister and Its OperationsSARTHAK VARSHNEYОценок пока нет
- Unit 3 CPU Organization 2019 UpdatedДокумент39 страницUnit 3 CPU Organization 2019 UpdatedCHETAN SAHUОценок пока нет
- Unit 5Документ56 страницUnit 5TakeItEasyDude TIEDОценок пока нет
- System BusДокумент12 страницSystem Busdipyaman patgiriОценок пока нет
- Pipelined Datapath and ControlДокумент37 страницPipelined Datapath and ControlAmanda Judy AndradeОценок пока нет
- Caleb Corbin - Annotated BibliographyДокумент2 страницыCaleb Corbin - Annotated BibliographyCaleb CorbinОценок пока нет
- Fundamental Cloud Concepts - Guided Notes - CompletedДокумент25 страницFundamental Cloud Concepts - Guided Notes - CompletedRobert ScorpionhhОценок пока нет
- FortiOS-6 2 8-CookbookДокумент1 681 страницаFortiOS-6 2 8-CookbookmarciodsОценок пока нет
- Combined14 S 2Документ520 страницCombined14 S 2Umair Mujtaba QureshiОценок пока нет
- Guide To Microsoft System Center Management Pack For SQL Server 2016 Reporting Services (Native Mode)Документ51 страницаGuide To Microsoft System Center Management Pack For SQL Server 2016 Reporting Services (Native Mode)Anonymous enr3NGjОценок пока нет
- Book Answer Summaries Chapter 2 3Документ6 страницBook Answer Summaries Chapter 2 3ghada alshabibОценок пока нет
- Introduction To Compiler Construction: Robert Van EngelenДокумент13 страницIntroduction To Compiler Construction: Robert Van EngelenRuchi SharmaОценок пока нет
- Brian Richardson Intel FinalДокумент24 страницыBrian Richardson Intel Finaltovih27684Оценок пока нет
- Chapter-2 (JavaFX) (Part-1)Документ42 страницыChapter-2 (JavaFX) (Part-1)wase samuelОценок пока нет
- Single Phase Low-Cost Energy Meter: IMS System Lab & Technical MarketingДокумент16 страницSingle Phase Low-Cost Energy Meter: IMS System Lab & Technical Marketingiskandarn_el5735Оценок пока нет
- Online Job Portal: Faculty of Computer and Informatics EngineeringДокумент50 страницOnline Job Portal: Faculty of Computer and Informatics EngineeringManoj BabuОценок пока нет
- S120 Control Unit Equip Man 0620 en-USДокумент346 страницS120 Control Unit Equip Man 0620 en-USrphrsОценок пока нет
- MSR609Документ2 страницыMSR609Jonathan StrongОценок пока нет
- Unit No.2 Derived Syntactical Constructs in Java: There Are Two Types of ConstructorДокумент27 страницUnit No.2 Derived Syntactical Constructs in Java: There Are Two Types of ConstructorOmkar mahamuniОценок пока нет
- 2019 Product Catalogue 201905Документ57 страниц2019 Product Catalogue 201905Khiết trầnОценок пока нет
- Marketing Pitch PowerPoint Template LightДокумент19 страницMarketing Pitch PowerPoint Template LightAnkitJuneja1Оценок пока нет
- Remote Terminal Unit: Intelligent Control EnterpriseДокумент4 страницыRemote Terminal Unit: Intelligent Control EnterpriseMurash javaidОценок пока нет
- Zero Lecture CSE304Документ34 страницыZero Lecture CSE304sumayya shaikОценок пока нет
- Csie Introduction PPT En-1Документ66 страницCsie Introduction PPT En-1Abshakour basheОценок пока нет
- Huawei - RNC - Iu Flex (RAN15.0 - 01)Документ84 страницыHuawei - RNC - Iu Flex (RAN15.0 - 01)Ha Dinh ThanhОценок пока нет
- FINAL Report in Online Grocery StoreДокумент56 страницFINAL Report in Online Grocery StoreBhavyaОценок пока нет
- Presents: Cops Iit (Bhu)Документ10 страницPresents: Cops Iit (Bhu)Soumyadwip ChandaОценок пока нет
- Azure 3Документ12 страницAzure 3felixhahn721Оценок пока нет
- Computer Science Full GCSE NotesДокумент16 страницComputer Science Full GCSE Notespty62ng7cpОценок пока нет
- Controllogix Ethernet/Ip Network Devices: User ManualДокумент50 страницControllogix Ethernet/Ip Network Devices: User ManualangelpadronaОценок пока нет
- What Are The Requirements of The ATMДокумент2 страницыWhat Are The Requirements of The ATMUvindu HarshanОценок пока нет
- Q.No. Question Choice 1 Choice 2 Linked List Implementation of QueueДокумент3 страницыQ.No. Question Choice 1 Choice 2 Linked List Implementation of QueueNickОценок пока нет
- Cisco IOS Image For GNS3 GitHubДокумент2 страницыCisco IOS Image For GNS3 GitHubEzequiel Almiron Galan0% (1)
- ERP Selection Checklist - ERP FocusДокумент3 страницыERP Selection Checklist - ERP FocusDennis NebekerОценок пока нет
- KT01103 Engineering Programming: School of Engineering and Information Technology, Universiti Malaysia SabahДокумент6 страницKT01103 Engineering Programming: School of Engineering and Information Technology, Universiti Malaysia SabahAlvin Tung Kwong ChoongОценок пока нет