Вам также может понравиться
- PasswordsДокумент40 страницPasswordsŢîbuleac Oliviu75% (12)
- Solution Manual for an Introduction to Equilibrium ThermodynamicsОт EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsОценок пока нет
- Reference Coordinate GeometryДокумент1 страницаReference Coordinate GeometryAnonymous gUySMcpSqОценок пока нет
- MA1511 Cheat Sheet V1.3 3Документ2 страницыMA1511 Cheat Sheet V1.3 3AlfrescoОценок пока нет
- Math - Triple IntegralДокумент11 страницMath - Triple IntegralEuw Chaiwanont100% (1)
- 2.3 Creation/ Setting Up of Company in Tally - ERP 9Документ1 страница2.3 Creation/ Setting Up of Company in Tally - ERP 9isaacОценок пока нет
- Aspects and Style in Technical WritingДокумент14 страницAspects and Style in Technical WritingRogelio Jerome Celeste100% (1)
- Pe Unit Plan TemplateДокумент3 страницыPe Unit Plan Templateapi-239320998Оценок пока нет
- Class 10 RespirationДокумент3 страницыClass 10 RespirationHimanshu singh100% (1)
- Interefenrece in Thin Films Session 3 (Wedge Shaped Film)Документ7 страницInterefenrece in Thin Films Session 3 (Wedge Shaped Film)Sanjiv BadheОценок пока нет
- Formula b4001Документ2 страницыFormula b4001safurasaariОценок пока нет
- Trigo ForumlasДокумент6 страницTrigo Forumlasshriganesharamaa007Оценок пока нет
- t6 GeneratorsДокумент4 страницыt6 Generatorsanas jawaidОценок пока нет
- Math CompreB (OAC)Документ10 страницMath CompreB (OAC)SHUSWABHIT SHADANGIОценок пока нет
- Grade 8b Unit 4 Formative (CA)Документ8 страницGrade 8b Unit 4 Formative (CA)merveОценок пока нет
- Formulae 2Документ5 страницFormulae 2ajay penumalaОценок пока нет
- Team Teaching Structural Design Civil Engineering Department FTUI 2012Документ51 страницаTeam Teaching Structural Design Civil Engineering Department FTUI 2012Handoko CocoОценок пока нет
- Lecture 15Документ15 страницLecture 15rakshithbt2359gowdaОценок пока нет
- Beam Design 2022Документ86 страницBeam Design 2022yohanes karuniawanОценок пока нет
- Assignment 3Документ2 страницыAssignment 3Jitesh HemjiОценок пока нет
- Diffraction Notes AktuДокумент9 страницDiffraction Notes AktuMayank RajОценок пока нет
- Math 3a Section 4Документ8 страницMath 3a Section 4api-681072345Оценок пока нет
- 2004 ARML IndividualsДокумент1 страница2004 ARML IndividualsAndrew CourtneyОценок пока нет
- TrigonometryДокумент4 страницыTrigonometryLyka Jane L. RamosОценок пока нет
- Avltree NoteДокумент11 страницAvltree NoteAryan AdlakhaОценок пока нет
- Pure Math - 2D Coordinate Geometry: Straight LinesДокумент10 страницPure Math - 2D Coordinate Geometry: Straight Linesjared liОценок пока нет
- B T E K: PlateДокумент1 страницаB T E K: PlateardabiliОценок пока нет
- Mathematics (2010) May Paper 2Документ15 страницMathematics (2010) May Paper 2Jewelle100% (1)
- Formula b4001Документ2 страницыFormula b4001safurasaariОценок пока нет
- Flexural Member 2016 KKIДокумент58 страницFlexural Member 2016 KKIBintang PanjaitanОценок пока нет
- Eegr3523 Mechatronics Homework Sets Assigned in The Spring Semester of 2019Документ28 страницEegr3523 Mechatronics Homework Sets Assigned in The Spring Semester of 2019Khaled AlshurmanОценок пока нет
- Geometry CheatsheetДокумент5 страницGeometry CheatsheetMarilyn CitadelОценок пока нет
- Class-9 - KB - December 2022Документ36 страницClass-9 - KB - December 2022AniiОценок пока нет
- RA01 Solenoid - Amit SharmaДокумент18 страницRA01 Solenoid - Amit SharmaPadam MantryОценок пока нет
- Gate Chemical 2008Документ12 страницGate Chemical 2008Adil RiazОценок пока нет
- E-Amath Formula SheetsДокумент2 страницыE-Amath Formula Sheetshehe hahaОценок пока нет
- Geometrical OpticsДокумент4 страницыGeometrical OpticsAshish GuptaОценок пока нет
- Fa17 mth322 ch01Документ23 страницыFa17 mth322 ch01Syeda Tehmina EjazОценок пока нет
- 10 Binomial Theorem Formula SheetsДокумент5 страниц10 Binomial Theorem Formula SheetsRushil PahwaОценок пока нет
- Point Angle Chisel Angle Helix Angle Chisel Edge: Geometry of Twist DrillsДокумент23 страницыPoint Angle Chisel Angle Helix Angle Chisel Edge: Geometry of Twist DrillsDhananjay PatwariОценок пока нет
- Yn Ayn Ayn N BXN BXN N: Recursive FiltersДокумент28 страницYn Ayn Ayn N BXN BXN N: Recursive FiltersnikshithОценок пока нет
- Formula Lab Sheet - 1p22 PDFДокумент2 страницыFormula Lab Sheet - 1p22 PDFRoy VeseyОценок пока нет
- Notes 3 6382 Complex IntegrationДокумент49 страницNotes 3 6382 Complex IntegrationSamhithaОценок пока нет
- 2E R 3E R EC RC: - I (Physics) 1Документ28 страниц2E R 3E R EC RC: - I (Physics) 1ANSHUMAN GHUGHUTIYALОценок пока нет
- HW 5Документ4 страницыHW 5김동욱Оценок пока нет
- 5a. MA2001 - Vector Integral Calculus (Line Integral)Документ11 страниц5a. MA2001 - Vector Integral Calculus (Line Integral)Matthew LauОценок пока нет
- Yn Ayn Aynn BXN BXNN: Recursive FiltersДокумент28 страницYn Ayn Aynn BXN BXNN: Recursive FiltersNikita ShakyaОценок пока нет
- 2013 ACSBR MYE Sec 3 Exp P2Документ5 страниц2013 ACSBR MYE Sec 3 Exp P2toh tim lamОценок пока нет
- Assignment 1 SolutionsДокумент12 страницAssignment 1 Solutionskfcsh5cbrcОценок пока нет
- Fiitjee Fiitjee Fiitjee Fiitjee: Fortnightly Assessment QuizДокумент8 страницFiitjee Fiitjee Fiitjee Fiitjee: Fortnightly Assessment QuizIshaan BagaiОценок пока нет
- IIT-JAM Question Paper 2020: ATH EM ATI CSДокумент20 страницIIT-JAM Question Paper 2020: ATH EM ATI CSSanket Mohare JainОценок пока нет
- PDFДокумент19 страницPDFWrittwikОценок пока нет
- Lecture11 PDFДокумент10 страницLecture11 PDFTihomir MarkovicОценок пока нет
- TCE Mathematics Methods Foundation External Exam Information Sheet 2018Документ4 страницыTCE Mathematics Methods Foundation External Exam Information Sheet 2018MathKeysОценок пока нет
- XI - Maths - Chapter 3 - TRIGONOMETRY UPTO TRANSFORMATIONS (73-109)Документ37 страницXI - Maths - Chapter 3 - TRIGONOMETRY UPTO TRANSFORMATIONS (73-109)SANTHOSH KUMARОценок пока нет
- Plane and Solid Geometry Formulas PreparДокумент2 страницыPlane and Solid Geometry Formulas PreparJuan MasipagОценок пока нет
- Distribusi-Tegangan-Metode 2V 1HДокумент14 страницDistribusi-Tegangan-Metode 2V 1HMuhammad ToyebОценок пока нет
- Analytic Geometry: PATTS College of AeronauticsДокумент12 страницAnalytic Geometry: PATTS College of AeronauticsBerns DulamОценок пока нет
- Math 10C - Unit 1 WorkbookДокумент44 страницыMath 10C - Unit 1 WorkbookjimОценок пока нет
- Formula Sheet Part 2 PDFДокумент4 страницыFormula Sheet Part 2 PDF7amniiОценок пока нет
- 2 Chapter-1Документ8 страниц2 Chapter-1swami061009Оценок пока нет
- Kinematics Jee Advanced ArchiveДокумент5 страницKinematics Jee Advanced ArchiveIshu FuliyaОценок пока нет
- RBD 2 MissingДокумент4 страницыRBD 2 MissingSree NathОценок пока нет
- Adobe Scan 04 Mar 2023Документ14 страницAdobe Scan 04 Mar 2023officialfarmaan1009Оценок пока нет
- Once You Upload An Approved Document, You Will Be Able To Download The Document IGCSE Physics WorkbookДокумент1 страницаOnce You Upload An Approved Document, You Will Be Able To Download The Document IGCSE Physics WorkbookisaacОценок пока нет
- Problems And: Surveying SolutionsДокумент1 страницаProblems And: Surveying SolutionsisaacОценок пока нет
- Systools Demo: Kcse Cluster Tests 12Документ4 страницыSystools Demo: Kcse Cluster Tests 12isaacОценок пока нет
- Systools Demo: Kcse Cluster Tests 12Документ4 страницыSystools Demo: Kcse Cluster Tests 12isaacОценок пока нет
- Systools Demo: Kcse Cluster Test 14Документ4 страницыSystools Demo: Kcse Cluster Test 14isaacОценок пока нет
- Measurement: LinearДокумент1 страницаMeasurement: LinearisaacОценок пока нет
- Activity Activity Description Key Performance Indicator Risk Supervisor's CommentsДокумент1 страницаActivity Activity Description Key Performance Indicator Risk Supervisor's CommentsisaacОценок пока нет
- Testing and Adjustment of A LevelДокумент1 страницаTesting and Adjustment of A LevelisaacОценок пока нет
- I&II - Agricultural EngineeringДокумент1 страницаI&II - Agricultural EngineeringisaacОценок пока нет
- Surveying Volume 2 by Dr. B.C.Punmia, Ashok Kumar Jain, Arun Kumar Jain - Laxmi Publications - Free Download PDFДокумент1 страницаSurveying Volume 2 by Dr. B.C.Punmia, Ashok Kumar Jain, Arun Kumar Jain - Laxmi Publications - Free Download PDFisaacОценок пока нет
- VBM PDFДокумент1 страницаVBM PDFisaacОценок пока нет
- Problems AND: Surveying SolutionsДокумент1 страницаProblems AND: Surveying SolutionsisaacОценок пока нет
- Problems And: Surveying SolutionsДокумент1 страницаProblems And: Surveying SolutionsisaacОценок пока нет
- Instrumental: OpticsДокумент1 страницаInstrumental: OpticsisaacОценок пока нет
- Surveying Solutions: Problems andДокумент1 страницаSurveying Solutions: Problems andisaacОценок пока нет
- AND Curves: Vertical TransitionДокумент1 страницаAND Curves: Vertical TransitionisaacОценок пока нет
- Problems: SolutionsДокумент1 страницаProblems: SolutionsisaacОценок пока нет
- Trigonometry: SurveyingДокумент1 страницаTrigonometry: SurveyingisaacОценок пока нет
- Lesson 1: Basics of AccountingДокумент1 страницаLesson 1: Basics of AccountingisaacОценок пока нет
- 2.3.2 Base Currency Information: Fundamentals of Tally - ERP 9Документ1 страница2.3.2 Base Currency Information: Fundamentals of Tally - ERP 9isaacОценок пока нет
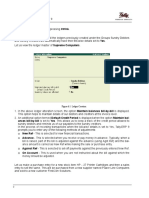
- Advanced Accounting in Tally - ERP 9: Figure 6.1 Ledger CreationДокумент1 страницаAdvanced Accounting in Tally - ERP 9: Figure 6.1 Ledger CreationisaacОценок пока нет
- Er 9Документ2 страницыEr 9isaacОценок пока нет
- Points To Remember: Voucher Entry in Tally - ERP 9Документ1 страницаPoints To Remember: Voucher Entry in Tally - ERP 9isaacОценок пока нет
- Relation To Academic Performance: Courtesy: Deccan HeraldДокумент1 страницаRelation To Academic Performance: Courtesy: Deccan HeraldisaacОценок пока нет
- Goo ErpДокумент1 страницаGoo ErpisaacОценок пока нет
- NMBYДокумент1 страницаNMBYisaacОценок пока нет
- 5.3.3 Walk-Through To Create An Account InvoiceДокумент3 страницы5.3.3 Walk-Through To Create An Account InvoiceisaacОценок пока нет
- Continental Slope Continental Crust Sedimentary RockДокумент1 страницаContinental Slope Continental Crust Sedimentary RockisaacОценок пока нет
- Guard Rail Cataloge PDFДокумент28 страницGuard Rail Cataloge PDFreza acbariОценок пока нет
- 100kva DG Set - 100kva Koel GensetДокумент3 страницы100kva DG Set - 100kva Koel GensetMothilalОценок пока нет
- How To Write Master Thesis AbstractДокумент8 страницHow To Write Master Thesis Abstractidmcgzbaf100% (2)
- HVAC TutorialДокумент115 страницHVAC Tutorialhungdinhthanh100% (5)
- VMGOДокумент3 страницыVMGOklirt carayoОценок пока нет
- Workshop On Previewing - CECARДокумент12 страницWorkshop On Previewing - CECARestefaany tejada100% (2)
- Daily Lesson Plan (Pre Calculus-Group 5)Документ4 страницыDaily Lesson Plan (Pre Calculus-Group 5)Paula Jan100% (5)
- Esp32-Wroom-32se Datasheet enДокумент26 страницEsp32-Wroom-32se Datasheet enWesllen Dias SouzaОценок пока нет
- Capex - 1Документ21 страницаCapex - 1Leandro FagundesОценок пока нет
- Bangladesh's Economic and Social Progress: From A Basket Case To A Development ModelДокумент450 страницBangladesh's Economic and Social Progress: From A Basket Case To A Development ModelFarjana TonnyОценок пока нет
- Security Analysis: Kumar SaurabhДокумент11 страницSecurity Analysis: Kumar Saurabhakhil vermaОценок пока нет
- Negative Effects of Social Media AddictionДокумент2 страницыNegative Effects of Social Media AddictionTubagus Fikih AriansyahОценок пока нет
- Project Management Practices and Performance of Non-Governmental Organizations Projects in Nairobi City County, KenyaДокумент22 страницыProject Management Practices and Performance of Non-Governmental Organizations Projects in Nairobi City County, KenyaAjit Pal SinghОценок пока нет
- El Lenguaje Del YogaДокумент149 страницEl Lenguaje Del YogaMax AlejandroОценок пока нет
- Simulation of CO2 Capture Using MEA Scrubbing A Flowsheet Decomposition Method PDFДокумент13 страницSimulation of CO2 Capture Using MEA Scrubbing A Flowsheet Decomposition Method PDFSuprio KamalОценок пока нет
- IB SL P1 Math Book Exam-MateДокумент375 страницIB SL P1 Math Book Exam-MatePang Hua TanОценок пока нет
- 8993060532-6991517762a Rod Handling System For CT20: Spare Parts ListДокумент164 страницы8993060532-6991517762a Rod Handling System For CT20: Spare Parts ListErick Ticona FalconОценок пока нет
- A Minor Project Report On ECOKART Student Racing Vehicle 2020 (ARPIT JAMES - 40215611116) (Mail2arpit2010@Gmail - Com)Документ59 страницA Minor Project Report On ECOKART Student Racing Vehicle 2020 (ARPIT JAMES - 40215611116) (Mail2arpit2010@Gmail - Com)شاہد بشیرОценок пока нет
- Mse 110l Fall 15 - Lab 4Документ25 страницMse 110l Fall 15 - Lab 4Billy JonesОценок пока нет
- Chapter 2 The Earths Landscapes and LandformsДокумент8 страницChapter 2 The Earths Landscapes and LandformsKatherine LuayonОценок пока нет
- CBSE Class 10 Social Science Syllabus 2022 23Документ12 страницCBSE Class 10 Social Science Syllabus 2022 23Bhavini SutarОценок пока нет
- Course Outline BRM AbasynДокумент4 страницыCourse Outline BRM Abasynsadeeq sahilОценок пока нет
- Chapter 9 - Worksheet1finalДокумент27 страницChapter 9 - Worksheet1finalTansu Erin ŞarlakОценок пока нет
- En Firearms Evaluation ReportДокумент168 страницEn Firearms Evaluation Reportandrew_davidson100% (2)
- Russian Military Intervention in The Syrian Civil War PDFДокумент62 страницыRussian Military Intervention in The Syrian Civil War PDFMendiburuFranciscoОценок пока нет
- Coverpage BLDG Projects F.Y. 2021Документ4 страницыCoverpage BLDG Projects F.Y. 2021Adrian PachecoОценок пока нет