Академический Документы
Профессиональный Документы
Культура Документы
Energia de Deformacion y Trabajo Virtual
Загружено:
felipe pagan montesАвторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Energia de Deformacion y Trabajo Virtual
Загружено:
felipe pagan montesАвторское право:
Доступные форматы
Energía de deformación y trabajo
virtual
4.1 introducción.
En los capítulos anteriores se ha justificado el cálculo de la magnitud de los
desplazamientos para analizar las estructuras estáticamente indeterminadas y
también son de interés en el diseño. En algunos casos las consideraciones de los
desplazamientos en una estructura bajo cargas de diseño son el factor
determinante para elegir las dimensiones de cada uno de los miembros
estructurales.
El cálculo de los desplazamientos en estructuras de comportamiento elástico y
lineal (que obedecen la ley de Hooke) exige conocer le módulo de elasticidad para
esfuerzos normales (𝐸) y el módulo de rigidez o para esfuerzos cortantes (𝐺). S
la relaciones esfuerzo deformación de no es lineal, es necesario establecer las
relaciones esfuerzo- deformación del material (leyes constitutivas)
Cuando los desplazamientos se necesitan para la solución de estructuras
estáticamente determinadas, se pueden usar valores relativos de 𝐸𝐴, 𝐸𝐼, 𝐺𝐽 de las
secciones transversales de los miembros, donde A es el área de la sección
transversal, I el momento de inercia y J la constante de torsión.
Si se requiere los desplazamientos reales, o si se analiza la estructura para un
movimiento de apoyo o para una variación de temperatura se debe conocer los
valores de E o G o de ambos.
En lo estudiado hasta ahora hemos utilizado los métodos analíticos para calcular
desplazamientos. En este capítulo se desarrolla el método del trabajo virtual el
cual es el más versátil. Este método es particularmente adecuado cuando se
necesitan los desplazamientos en solo unas cuantas secciones. Sin embargo,
cuando se necesita la configuración deformada completa de una estructura El
método del trabajo virtual se hace laborioso, pero es adecuado cuando la
formulación se hace mediante matrices y con ayuda de una computadora.
G. Aliaga Energía de deformación y trabajo virtual
4.2 Trabajo Externo de un sistema de fuerzas
Considérese Si una fuerza 𝐹𝑖 se aplica gradualmente a una estructura (véase
figura 4.1), de tal manera que la energía cinética de su masa sea cero. Sea 𝐷𝑖 el
desplazamiento resultante en el punto de aplicación y en la dirección de la fuerza
𝐹𝑖 .
𝐹𝑖
Figura 4.1 Estructura sometida a la fuerza Fi
Si la estructura se comporta Elásticamente, la curva fuerza-desplazamiento sigue
la misma trayectoria durante la carga y la descarga (véase figura 4.2a).
Considérese ahora que en alguna etapa de la aplicación de la carga se
incrementa la fuerza 𝐹𝑖 en 𝛥𝐹𝑖 que causa un aumento correspondiente en el
desplazamiento 𝛥𝐷𝑖 , el trabajo realizado por este incremento de carga es
𝛥𝑊 = 𝐹𝑖 𝛥𝐷𝑖
Como se ilustra en el rectángulo sombreado de la figura 4.2a. En el límite cuando
los incrementos son sedicientemente pequeños, podemos escribir que
𝑑𝑊 = 𝐹𝑖 𝑑𝐷𝑖
Y se deduce que el trabajo externo total efectuado por 𝐹𝑖 durante el
desplazamiento 𝐷𝑖 es el área bajo la curva fuerza-desplazamiento entre 𝑂 y 𝐷𝑖 .
G. Aliaga Energía de deformación y trabajo virtual
Cuando el material de la estructura y esta tienen comportamiento elástico lineal
(obedece la ley de Hooke), la curva fuerza desplazamiento es lineal tal como se
muestra en la figura 4.2b, y el trabajo que realiza la fuerza 𝐹𝑖 resulta
1
𝑊= 𝐹𝐷
2 𝑖 𝑖
Fuerza en i Fuerza en i
Desplazamiento en Desplazamiento en
la coordenada i la coordenada i
Figura 4.2. Relaciones fuerza-desplazamiento
Si la estructura se somete a un sistema de fuerzas 𝐹1 , 𝐹2 , … , 𝐹𝑛 que se aplican
gradualmente desde cero hasta su valor final y causan desplazamientos
𝐷1 , 𝐷2 , … , 𝐷𝑛 en la ubicación y dirección de las fuerzas, el trabajo externo total
resulta ser:
𝑛
1 1 1 1
𝑊 = 𝐹1 𝐷1 + 𝐹2 𝐷2 + ⋯ + 𝐹𝑛 𝐷𝑛 = ∑ 𝐹𝑖 𝐷𝑖 (4.1)
2 2 2 2
1
O en forma matricial
1
[𝑊]1×1 = {𝐹}𝑇𝑛×1 {𝐷}𝑛×1 (4.2)
2
G. Aliaga Energía de deformación y trabajo virtual
Donde {𝐹}𝑇 es la transpuesta del vector columna {𝐹} que representa las fuerzas.
El trabajo realizado es una cantidad escalar cuyas dimensiones so (fuerza x
longitud)
4.3 Energía de deformación
En la sección 4.2 se dedujo una expresión para el trabajo realizado en una
estructura sometida a un sistema de fuerzas{𝐹}. Este trabajo será almacenado
completamente en la estructura elástica en forma de energía de deformación,
siempre que no se pierda trabajo en forma de energía cinética que cause vibración
de la estructura, o de energía térmica que produzca una elevación de su
temperatura. En otras palabras, la carga se debe aplicar gradualmente a la
estructura y los esfuerzos no deben exceder el límite de proporcionalidad del
material. Cuando se descarga gradualmente la estructura se recupera la energía
interna, haciendo que la estructura vuelva a recobrar su forma original. Por lo
tanto, el trabajo externo 𝑊 y la energía interna 𝑈 son iguales entre sí:
𝑊=𝑈 (4.3)
La ecuación 2 se puede utilizar para calcular desplazamientos y fuerzas, pero
primero debemos considerar el método para calcular la energía interna de
deformación
Considérese un elemento diferencial de una estructura elástica lineal en la forma
de un prisma cuya sección transversal es 𝑑𝐴 y su longitud 𝑑𝑙 . La sección
transversal puede estar sometida a un esfuerzo normal 𝜎 (figura 4.3a) o a un
esfuerzo cortante 𝜏 figura 4.3b). El extremo B del elemento esta empotrado
mientras que el extremo C está libre. Los desplazamientos de C bajo los dos tipos
de esfuerzo son
𝜎 𝜏
𝛥1 = 𝑑𝑙 y 𝛥2 = 𝑑𝑙
𝐸 𝐺
G. Aliaga Energía de deformación y trabajo virtual
Figura 4.3 deformación de un elemento debido a (a) un esfuerzo normal, (b) un esfuerzo cortante
Donde E: módulo de elasticidad para esfuerzo normal
G: módulo de elasticidad en esfuerzo cortante (módulo de rigidez)
Cuando se aplican gradualmente las fuerzas 𝜎𝑑𝐴 y 𝜏𝑑𝐴 que causan los
desplazamientos anteriores, la energía almacenada en los dos elementos es
1 1 𝜎2
𝑑𝑈 = (𝜎𝑑𝐴)𝛥1 = 𝑑𝑙𝑑𝐴
2 2𝐸
1 1 𝜏2
𝑑𝑈 = (𝜏𝑑𝐴)𝛥2 = 𝑑𝑙𝑑𝐴
2 2𝐺
Usando ε como símbolo general para deformación, las ecuaciones anteriores se
pueden escribir en la forma general
1
𝑑𝑈 = 𝜎𝜀𝑑𝑣 (4.4)
2
Donde
𝑑𝑣 = 𝑑𝑙𝑑𝐴 = volumen del elemento y 𝜎 representa un esfuerzo generalizado, que
es bien un esfuerzo normal o un esfuerzo cortante
G. Aliaga Energía de deformación y trabajo virtual
La deformación 𝜀 de la ecuación 4.4 se debe o a un esfuerzo normal con
𝜎 𝜏
magnitud 𝜀 = 𝐸 , o a un esfuerzo cortante, en cuyo caso 𝜀 = 𝐺. Pero E y G se
relacionan con
𝐸
𝐺=
2(1 + 𝜇)
Donde 𝜇= módulo de Poisson, por lo que la deformación debida a esfuerzo
cortante puede expresarse como
𝜏
𝜀 = 2 (1 + 𝜇)
𝐸
El incremento de la energía interna de deformación en cualquier elemento elástico
de volumen 𝑑𝑣 por efecto de un cambio en deformación de 𝜀 = 0 a 𝜀 = 𝜀𝑓 es
𝜀𝑓
𝑑𝑈 = 𝑑𝑣 ∫ 𝜎𝑑𝜀 (4.5)
0
𝜀
En el que la integral: ∫0 𝑓 𝜎𝑑𝜀 se conoce como densidad de energía de deformación
y se deduce que es igual al área bajo la curva esfuerzo-deformación del material
(véase figura 4.4a).
Deformación ε Deformación ε
Figura 4.4 Relaciones esfuerzo deformación, (a) no lineal, (b) lineal
G. Aliaga Energía de deformación y trabajo virtual
Si el material obedece la ley de Hooke, la curva esfuerzo-deformación es una línea
1
recta (véase figura 4.4b) y la densidad de la energía de deformación es: 𝜎𝜀
2
Se puede considerar que cualquier estructura consiste en pequeños elementos del
tipo que se muestran en la figura 4.5 sometidos a esfuerzos normales 𝜎𝑥 , 𝜎𝑦 , 𝜎𝑧 y a
esfuerzos cortantes 𝜏𝑥𝑦 , 𝜏𝑥𝑧 , 𝜏𝑦𝑧 con deformaciones resultantes 𝜀𝑥 , 𝜀𝑦 , 𝜀𝑧 , 𝛾𝑥𝑦 , 𝛾𝑥𝑧 , 𝛾𝑦𝑧
en los que los subíndices 𝑥 , 𝑦, 𝑧 se refieren a los ejes de coordenadas cartesianas
rectangulares. Por lo tanto la energía de deformación interna total en una
estructura elástica lineal es
6
1
𝑈 = ∑ ∫ 𝜎𝑚 𝜀𝑚 𝑑𝑣 (4.6)
2 𝑣 𝑚=1
Donde 𝑚 se refiere al tipo de esfuerzo y a la deformación correspondiente. La
integración debe llevarse a cabo sobre el volumen de la estructura para cada tipo
de esfuerzo por separado.
En el caso de una estructura no lineal, la energía de deformación total se obtiene
integrando la ecuación 4.5 para las seis componentes de esfuerzo y deformación
6 𝜀𝑓𝑚
𝑑𝑈 = ∑ ∫ ∫ 𝜎𝑚 𝜀𝑚 𝑑𝑣 (4.7)
𝑚=1 𝑣 0
Figura 4.5 Componentes de esfuerzo de un elemento (los esfuerzos en las caras opuestas actúan
en direcciones opuestas)
G. Aliaga Energía de deformación y trabajo virtual
Donde 𝜀𝑓𝑚 es el valor final de cada componente de deformación.
Se necesita especial cuidado para relacionar el esfuerzo y la deformación. La
𝜎
expresión 𝜀 = 𝐸 para un material lineal es aplicable cuando el esfuerzo se
aplicanormal a solo un plano. En el caso más general, cuando actúan los seis
tipos de esfuerzo (figura 4.5) la relación esfuerzo deformación para un material
homogéneo e isotrópico que obedece la ley de Hooke se puede escribir en forma
matricial
{𝜀} = [𝜖]{𝜎} (4.8)
Donde
{𝜀} = {𝜀𝑥 , 𝜀𝑦 , 𝜀𝑧 , 𝛾𝑥𝑦 , 𝛾𝑥𝑧 , 𝛾𝑦𝑧 } (4.9)
Y
{𝜎} = {𝜎𝑥 , 𝜎𝑦 , 𝜎𝑧 , 𝜏𝑥𝑦 , 𝜏𝑥𝑧 , 𝜏𝑦𝑧 } (4.10)
Y [𝜖] es una matriz cuadrada simétrica que representa la flexibilidad del elemento
1 −𝜇 −𝜇 0 0 0
−𝜇 1 −𝜇 0 0 0
1 −𝜇 −𝜇 1 0 0 0
[𝜖] = (4.11)
𝐸 0 0 0 2(1 + 𝜇) 0 0
0 0 0 0 2(1 + 𝜇) 0
[0 0 0 0 0 2(1 + 𝜇)]
La ecuación 4.8 no hace más que expresar en forma concisa la ley generalizada
de Hooke, por ejemplo la primera ecuación expresada por la ecuación 4.8 es
𝜎𝑥 𝜇(𝜎𝑧 + 𝜎𝑦 )
𝜀𝑥 = −
𝐸 𝐸
Igualmente la cuarta es
2(1 + 𝜇)
𝜀𝑥 = 𝜏𝑥𝑦
𝐸
G. Aliaga Energía de deformación y trabajo virtual
La inversión de la ecuación 4.8 nos permite expresar el esfuerzo en función de la
deformación, así
{𝜎} = [𝑘]{𝜀} (4.12)
Donde [𝑘] = [𝜖]−1 es una matriz cuadrada simétrica que representa la rigidez del
elemento
0 0 0
(1 − 𝜇) 𝜇 𝜇
0 0 0
𝜇 (1 − 𝜇) 𝜇 0 0 0
𝐸 𝜇 𝜇 1
[𝜖] = (1 − 2𝜇) 0 0 (4.13)
(1 + 𝜇)(1 − 2𝜇) 0 0 0 (1 − 2𝜇) 0
0 0 0 2
0 2 (1 − 2𝜇)
[ 0 0 0 ]
0 0 2
Usando las ecuaciones 4.9 y 4.10, la ecuación 4.6 puede escribirse como
1
𝑈= ∫ {𝜎}𝑇 {𝜀}𝑑𝑣 (4.14)
2 𝑣
1
𝑈= ∫ {𝜀}𝑇 {𝜎}𝑑𝑣 (4.14a)
2 𝑣
Sustituyendo la ecuación 4.8 o 4.12 en las ecuaciones 4.14 y 4.14a obtenemos
respectivamente
1
𝑈= ∫ {𝜎}𝑇 [𝜖]{𝜎}𝑑𝑣 (4.15)
2 𝑣
1
𝑈= ∫ {𝜀}𝑇 [𝑘]{𝜀}𝑑𝑣 (4.16)
2 𝑣
Estas ecuaciones son generales para una estructura elástica lineal de cualquier
tipo. Sin embargo, en las estructuras compuestas por barras (armaduras, marcos
emparrillados) la energía de deformación interna debido a diferentes tipos de
G. Aliaga Energía de deformación y trabajo virtual
resultantes de esfuerzos se determina mejor separadamente, de la manera que
se desarrolla a continuación.
4.3.1 Energía de deformación debida a fuerza axial
Consideremos un segmento diferencial de longitud 𝑑𝑙 de un miembro cuya sección
transversal es 𝐴 y su longitud 𝑙 sometido a una fuerza axial (normal) N (véase
figura 4.6a). El esfuerzo normal es
𝑁
𝜎=
𝐴
La deformación es
𝑁
𝜀=
𝐸𝐴
Según la ecuación 4.4 la energía de deformación total es
1𝑁 𝑁 1 𝑁 2 𝐴𝑑𝑙
𝑑𝑈 = 𝑑𝑣 =
2 𝐴 𝐸𝐴 2 𝐸𝐴2
Integrando
1 𝑁2
𝑈= ∫ 𝑑𝑙
2 𝐸𝐴
(4.17)
Para un miembro prismático (EA constante) resulta
1 𝑁2𝑙
𝑈= (4.18)
2 𝐸𝐴
G. Aliaga Energía de deformación y trabajo virtual
Distribución del
esfuerzo cortante
Figura 4.6 Deformación de un segmento de un miembro debidos a fuerzas internas. (a) fuerza
axial. (b) Momento flector. (c)Fuerza cortante. (d)Momento de torsión
G. Aliaga Energía de deformación y trabajo virtual
4.3.2 Energía de deformación debida a momento flector
Consideremos un segmento del sometido a un momento flector 𝑀 alrededor del
eje 𝑧, uno de los ejes principales de la sección transversal (figura 4.6b). El
esfuerzo normal sobre un elemento 𝑑𝐴 a una distancia 𝑦̅ del eje z es
𝑀𝑦̅
𝜎=
𝐼
Donde : I =momento de inercia respecto al eje centroidal z
La deformación correspondiente es
𝜎 𝑀𝑦̅
𝜀= =
𝐸 𝐸𝐼
Según la ecuación 4.4, la energía de deformación del elemento diferencial es
1 𝑀𝑦̅ 𝑀𝑦̅ 1 𝑀2 𝑦̅ 2
𝑑𝑈 = ( ) ( ) 𝑑𝑣 = 𝑑𝐴𝑑𝑙
2 𝐼 𝐸𝐼 2 𝐸𝐼 2
Integrando sobre la sección transversal del segmento 𝑑𝑙 se encuentra que la
energía de deformación es
1 𝑀2
𝛥𝑈 = 𝑑𝑙 ∫ 𝑦̅ 2 𝑑𝐴
2 𝐸𝐼 2 𝐴
La integral anterior es igual a 𝐼, por lo tanto
1 𝑀2
𝛥𝑈 = 𝑑𝑙
2 𝐸𝐼
Luego, la energía de deformación para toda la estructura se obtiene integrando la
expresión anterior
G. Aliaga Energía de deformación y trabajo virtual
1 𝑀2
𝑈= ∫ 𝑑𝑙 (4.19)
2 𝐸𝐼
La integración debe llevarse a cabo sobre toda la longitud de todos los miembros
de la estructura
4.3.3 Energía de deformación debida a fuerza cortante
Considérese un segmento 𝑑𝑙 de la figura 4.6c, sometido a una fuerza cortante 𝑉 .
Recordando lo estudiado en Mecánica de materiales I, en que los esfuerzos
cortantes están dados por la expresión
𝑉𝑄
𝜏=
𝐼𝑡
Donde 𝑄 = es el primer momento respecto al eje centroidal z del área
sobre la distancia 𝑦̅
𝑡= ancho de la sección transversal en 𝑦̅
V= fuerza cortante total
La deformación de corte 𝛾 esta dada por
𝜏 𝑉𝑄
𝛾= =
𝐺 𝐺𝐼𝑡
Entonces de acuerdo con la ecuación 4.4 se tiene
1 𝑉𝑄 𝑉𝑄 1 𝑉 2𝑄2
𝑑𝑈 = ( ) ( ) 𝑑𝑣 = 𝑑𝐴𝑑𝑙
2 𝐼𝑡 𝐺𝐼𝑡 2 𝐺𝐼 2 𝑡 2
Integrando sobre la sección transversal del segmento 𝑑𝑙 se encuentra que la
energía de deformación es
G. Aliaga Energía de deformación y trabajo virtual
1 𝑉 2 𝑑𝑙 𝑄2
𝛥𝑈 = ∫ 𝑑𝐴
2 𝐺𝐼 2 𝐴 𝑡 2
ó
1 𝑉 2 𝑑𝑙 𝐴 𝑄2
𝛥𝑈 = ∫ 𝑑𝐴
2 𝐺𝐴 𝐼 2 𝐴 𝑡 2
Introduciendo la notación
𝐴 𝑄2
𝑘 = 2 ∫ 2 𝑑𝐴 (4.20)
𝐼 𝐴 𝑡
Se obtiene
1 𝑉 2 𝑑𝑙
𝛥𝑈 = 𝑘
2 𝐺𝐴
El coeficiente 𝑘 es una magnitud adimensional que depende de la forma de la
sección transversal del miembro. Por ejemplo para el caso de una sección
rectangular de dimensiones b y d (véase figura 4.6c) el momento estático 𝑄 es
𝑑
𝑑 − 𝑦̅ 1 𝑑2
𝑄 = [𝑏 ( − 𝑦̅) (𝑦̅ + 2 )] = 𝑏 ( − 𝑦̅ 2 )
2 2 2 4
𝑏𝑑 3
𝑑𝐴 = 𝑏𝑑𝑦̅ 𝐴 = 𝑏𝑑 𝐼= 𝑡=𝑏
12
Entonces según la ecuación 4.20
2
1 𝑑2
𝑏𝑑 𝑑/2 [2 𝑏 ( 4 − 𝑦̅ 2 )] 6
𝑘= ∫ 𝑏𝑑𝑦̅ = = 1.2
𝑏𝑑3 −𝑑/2 𝑏2 5
12
G. Aliaga Energía de deformación y trabajo virtual
Por lo tanto
1 𝑉2
𝛥𝑈 = (1.2 ) 𝑑𝑙 (4.21)
2 𝐺𝐴
La expresión anterior es válida para una sección rectangular. En el caso de una
10
sección circular maciza 𝑘 = . En el de una sección circular con paredes
9
delgadas 𝑘 = 2, etc
Una sección cualquiera, la ecuación 4.21 se puede escribir en la forma general
1 𝑉2
𝛥𝑈 = ( ) 𝑑𝑙 (4.22)
2 𝐺𝐴𝑟
Donde 𝐴𝑟 es el área reducida de la sección transversal. Es decir
𝐴
𝐴𝑟 =
𝑘
Para perfiles 𝐼 de acero laminado, 𝐴𝑟 ≅ 𝑎𝑟𝑒𝑎 𝑑𝑒𝑙 𝑎𝑙𝑚𝑎
La energía de deformación total en una estructura debida a la fuerza cortante se
obtiene integrando la ecuación 6.22, sobre toda la longitud de cada miembro de la
estructura
1 𝑉2
𝑈= ∫ 𝑑𝑙 (4.23)
2 𝐺𝐴𝑟
4.3.4 Energía de deformación debida a la torsión
Considérese un segmento 𝑑𝑙 (véase la figura 6.4d) de una barra circular sometida
a un momento de torsión 𝑇. Por nuestros conocimientos de resistencia de
materiales I , el esfuerzo cortante en cualquier punto a una distancia 𝑟 del centro
es
G. Aliaga Energía de deformación y trabajo virtual
𝑇𝑟
𝜏=
𝐽
donde: J= momento pilar de inercia
La deformación correspondiente es
𝜏 𝑇𝑟
𝛾= =
𝐺 𝐺𝐽
Así según la ecuación 6.4, la energía de deformación del elemento es
1 𝑇𝑟 𝑇𝑟 1 𝑇 2𝑟 2
𝑑𝑈 = ( ) ( ) 𝑑𝑣 = 𝑑𝐴𝑑𝑙
2 𝐽 𝐺𝐽 2 𝐺𝐽2
Integrando sobre la sección transversal del segmento 𝑑𝑙 se encuentra que la
energía de deformación es
1 𝑇 2 𝑑𝑙
𝛥𝑈 = ∫ 𝑟 2 𝑑𝐴
2 𝐺𝐽2
Donde la integral
∫ 𝑟 2 𝑑𝐴 = 𝐽
𝐴
Es el momento polar de inercia; entonces
1 𝑇 2 𝑑𝑙
𝛥𝑈 =
2 𝐺𝐽
Así para toda la estructura, la energía de deformación debida a momento torsor se
obtiene integrando la ecuación anterior sobre todos los miembros de la estructura
G. Aliaga Energía de deformación y trabajo virtual
1 𝑇 2 𝑑𝑙
𝑈= ∫ (4.24)
2 𝐺𝐽
Ejemplo 4.1. Determinar la energía de deformación en la estructura mostrada en
la figura
G. Aliaga Energía de deformación y trabajo virtual
4.3.5 Energía de deformación total
En una estructura que se encuentra solicitada por todas las fuerzas internas (
𝑁, 𝑀, 𝑉 𝑦 𝑇), Los valores obtenidos con las ecuaciones 4.17, 4.19, 4.23 y 4.24, se
suman para obtener la energía de deformación total
1 𝑁 2 𝑑𝑙 1 𝑀𝑧2 𝑑𝑙 1 𝑀𝑦2 𝑑𝑙 1 𝑉𝑦2 𝑑𝑙 1 𝑉𝑧2 𝑑𝑙 1 𝑇 2 𝑑𝑙
𝑈= ∫ + ∫ + ∫ + ∫ + ∫ + ∫ (4.25)
2 𝐸𝐴 2 𝐸𝐼𝑧 2 𝐸𝐼𝑦 2 𝐺𝐴𝑟𝑦 2 𝐺𝐴𝑟𝑧 2 𝐺𝐽
Las integraciones se llevan a cabo a lo largo der toda la longitud de cada miembro
de la estructura. Debemos observar que cada integral comprende un producto de
una fuerza interna 𝑁, 𝑀, 𝑉 𝑦 𝑇 actuando sore un segmento 𝑑𝑙 y el desplazamiento
relativo de la sección transversal en los extremos del segmento 𝑑𝑙; éstos
desplazamientos son:
𝑁𝑑𝑙 𝑀𝑧 𝑑𝑙 𝑀𝑦 𝑑𝑙 𝑉𝑦 𝑑𝑙 𝑉𝑧 𝑑𝑙 𝑇𝑑𝑙
, , , ,
𝐸𝐴 𝐸𝐼𝑧 𝐸𝐼𝑦 𝐺𝐴𝑟𝑦 𝐺𝐴𝑟𝑧 𝐺𝐽
No siempre todos los sumandos de la ecuación 4.25 tienen la misma importancia.
En la práctica, donde los miembros que constituyen la estructura, trabajan a
flexión o torsión, los términos correspondientes a la fuerza normal y la fuerza
cortante, resultan ser mucho menores que los correspondientes al momento flector
y al momento torsor. Es decir, la energía correspondiente a la fuerza normal y la
fuerza cortante, como norma general, resulta muy inferior a la energía de la flexión
y la torsión.
También, pueden ocurrir casos cuando todos los sumandos son del mismo orden.
Así por ejemplo, en el caso de un miembro traccionada excéntricamente (figura),
cuando el brazo 𝑎 es pequeño, la energía de la flexión y de la tracción son
magnitudes del mismo orden.
G. Aliaga Energía de deformación y trabajo virtual
4.4. Energía complementaria y trabajo complementario
El concepto de energía complementaria es general, pero aquí se considera el caso
particular de una miembro de una armadura conectada mediante pasadores y
sometida a fuerza axial. El miembro sufre un alargamiento 𝑒 debido a la fuerza
axial 𝑁 y un alargamiento 𝑒𝑡 debido a efectos ambientales tales como cambio de
Figura 4.7 Relación fuerza-alargamiento
temperatura, contracción, montaje, etc. Por lo tanto el alargamiento total de la
barra es 𝛥 = 𝑒𝑡 + 𝑒. Supóngase que la relación entre la fuerza axial 𝑁 y el
alargamiento 𝛥 es como se muestra en la figura 4.7. Entonces para una fuerza
gradualmente aplicada, que llega al valor 𝑁𝑓 y produce un alargamiento final 𝑒𝑓 de
manera que 𝛥 = 𝑒𝑡 + 𝑒𝑓 , la energía de deformación es
𝑒𝑓
𝑈 = ∫ 𝑁𝑑𝑒
0
Que es igual al área sombreada horizontalmente de la figura 4.7
G. Aliaga Energía de deformación y trabajo virtual
Energía de deformación complementaria
Se define la energía de deformación complementaria como
𝑁𝑓
∗
𝑈 = ∫ 𝛥𝑑𝑁 (4..26)
0
o
𝑁𝑓
∗
𝑈 = 𝑁𝑓 𝑒𝑡 + ∫ 𝑒𝑑𝑁 (4.27)
0
Que es el área sombreada verticalmente de la figura 4.7.
La energía de deformación complementaria no tiene significado físico y se usa el
concepto por conveniencia en la mecánica estructural
Se deduce de la figura 4.7 que la suma de la energía complementaria y la energía
de deformación es igual al área del rectángulo sombreado
𝑈 + 𝑈 ∗ = 𝑁𝑓 (𝑒𝑡 + 𝑒𝑓 )
En la misma figura también se observa que si se aumenta el alargamiento de 𝑒 a
(𝑒 + 𝑑𝑒), U aumenta en una cantidad 𝑁𝑑𝑒, de modo que
𝑑𝑈
=𝑁 (4.28)
𝑑𝑒
La derivada de 𝑈 ∗ con respecto a 𝑁 es igual al alargamiento 𝛥, es decir
𝑑𝑈 ∗
= 𝑒𝑡 + 𝑒 = 𝛥 (4.29)
𝑑𝑁
Trabajo complementario
Si se dibuja un diagrama de fuerza-desplazamiento similar al diagrama fuerza-
alargamiento de la figura 4.7, la área izquierda de la figura se define como trabajo
complementario 𝑊 ∗ , así se tiene
G. Aliaga Energía de deformación y trabajo virtual
𝐹𝑓
∗
𝑊 = ∫ 𝐷𝑑𝐹 (4.30)
0
donde 𝐹 es el valor final de la fuerza, y 𝐷 = 𝑑𝑡 + 𝑑 es el desplazamiento total: 𝑑 es
el desplazamiento producido por la fuerza y 𝑑𝑡 es el desplazamiento debido a
efectos ambientales ( temperatura pre esfuerzo, contracción, asentamientos, etc.)
Si un sistema de fuerzas 𝐹1 , 𝐹2 , … , 𝐹𝑛 se aplica gradualmente a una estructura y
causan desplazamientos 𝐷1 , 𝐷2 , … , 𝐷𝑛 en la ubicación y dirección de las fuerzas, el
trabajo complementario resulta ser:
𝑊 ∗ = ∑ ∫ 𝐷𝑑𝐹 (4.31)
𝑖=1 0
Donde 𝐹𝑖𝑓 es el valor final de 𝐹𝑖 .
El trabajo complementario 𝑊 ∗ es igual al trabajo externo 𝑊 cuando la estructura
tiene comprtamiento elástico y lineal y el desplazamiento 𝐷 es causado
únicamente por las cargas externas aplicadas, es decir no existen los
desplazamientos debido a efectos ambientales, por lo tanto
𝑛
∗
1
𝑊 = 𝑊 = ∑ 𝐹𝑖 𝐷1 (4.32)
2
𝑖=1
4.5 Principio del trabajo virtual
Este principio relaciona un sistema de fuerzas en equilibrio con un sistema
compatible de desplazamientos en una estructura lineal o no lineal. El nombre del
principio se deriva del hecho de que se aplica a la estructura un sistema ficticio
(virtual) de fuerzas en equilibrio o pequeños desplazamientos virtuales y se
relaciona con los desplazamientos reales o las fuerzas verdaderas,
respectivamente. Se puede usar cualquier sistema de fuerzas o desplazamientos
virtuales, pero es necesario que se satisfaga las condiciones de equilibrio de las
G. Aliaga Energía de deformación y trabajo virtual
fuerzas virtuales o la compatibilidad de los desplazamientos virtuales. Esto
significa que los desplazamientos virtuales pueden ser cualesquiera
desplazamientos infinitesimales geométricamente posibles: deben ser continuos
dentro del límite de la estructura y deben satisfacer las condiciones de frontera.
Con una selección adecuada de fuerzas o desplazamientos virtuales, se puede
usar el principio del trabajo virtual para calcular desplazamientos o fuerzas, tal
como se desarrolla a continuación.
4.5.1 Principio de las fuerzas virtuales
Consideremos una estructura deformada por el efecto de la aplicación de fuerzas
externas y de causas ambientales. . Considérese que la deformación total real en
cualquier punto es ε, y los desplazamientos (reales) correspondientes en 𝑛
coordenadas seleccionadas son 𝐷1 , 𝐷2 , … , 𝐷𝑛 . Ahora supóngase que antes de
introducir estas cargas y deformaciones verdaderas, la estructura fue sometida a
un sistema de fuerzas virtuales 𝛿𝐹1 , 𝛿𝐹2 , … , 𝛿𝐹𝑛 en las coordenadas 1, 2, … , 𝑛
causando un esfuerzo 𝜎𝑖 en cualquier punto. El sistema de fuerzas virtuales está
en equilibrio pero no necesita corresponder a los desplazamientos reales {𝐷}. El
principio de las fuerzas virtuales expone que el producto de los desplazamientos
verdaderos y las correspondientes fuerzas virtuales (que es el trabajo
complementario virtual) es igual al producto de los desplazamientos internos
reales y las correspondientes fuerzas internas virtuales (que es la energía de
deformación complementaria virtual). Por lo tanto
𝑇𝑟𝑎𝑏𝑎𝑗𝑜 𝑐𝑜𝑚𝑝𝑙𝑒𝑚𝑒𝑛𝑡𝑎𝑟𝑖𝑜 𝑣𝑖𝑟𝑡𝑢𝑎𝑙 = 𝑒𝑛𝑒𝑟𝑔𝑖𝑎 𝑑𝑒 𝑑𝑒𝑓𝑜𝑟𝑚𝑎𝑐𝑖𝑜𝑛 𝑣𝑖𝑟𝑡𝑢𝑎𝑙 𝑐𝑜𝑚𝑝𝑙𝑒𝑚𝑒𝑛𝑡𝑎𝑟𝑖𝑎
Que se puede expresar en forma general como
∑ 𝛿𝐹𝑖 𝐷1 = ∫{𝛿𝜎}𝑇 {𝜀}𝑑𝑣 (4.33)
𝑖=1
G. Aliaga Energía de deformación y trabajo virtual
Donde 𝛿𝜎 es un esfuerzo que corresponde a las fuerzas virtuales 𝛿𝐹 y ε es una
deformación real compatible con los desplazamientos reales {𝐷}. La integración se
lleva a cabo sobre el volumen de la estructura y la suma es por todas las fuerzas
virtuales {𝛿𝐹}. La ecuación 4.33 enuncia que los valores del trabajo
complementario de las fuerzas externas virtuales y la energía complementaria de
las fuerzas internas virtuales mientras se mueven junto con los desplazamientos
reales son iguales, en otras palabras
∑(𝑓𝑢𝑒𝑟𝑧𝑎 𝑣𝑖𝑟𝑡𝑢𝑎𝑙 𝑒𝑛 𝑖) (𝑑𝑒𝑠𝑝𝑙𝑎𝑧𝑎𝑚𝑖𝑒𝑛𝑡𝑜 𝑟𝑒𝑎𝑙 𝑒𝑛 𝑖)
𝑖=1
= ∫(𝑓𝑢𝑒𝑟𝑧𝑎𝑠 𝑖𝑛𝑡𝑒𝑟𝑛𝑎𝑠 𝑣𝑖𝑟𝑡𝑢𝑎𝑙𝑒𝑠)(𝑑𝑒𝑠𝑝𝑙𝑎𝑧𝑎𝑚𝑖𝑒𝑛𝑡𝑜𝑠 𝑖𝑛𝑡𝑒𝑟𝑛𝑜𝑠 𝑟𝑒𝑎𝑙𝑒𝑠)𝑑𝑣
Más adelante se usará este principio de las fuerzas virtuales para calcular el
desplazamiento en cualquier coordenada a causa de las deformaciones debidas a
fuerzas internas reales conocidas.
4.5.2 Principio de los desplazamientos virtuales
El principio del trabajo virtual también se usa para determinar la fuerza externa en
una coordenada a causa de las fuerzas internas. En este caso, se supone que la
estructura adquiere desplazamientos virtuales {𝛿𝐷} compatibles con el patrón de
deformación virtual {𝛿𝜀} en cualquier punto. El producto de las fuerzas internas
reales {𝐹} y los desplazamientos virtuales {𝛿𝐷} es igual al producto de las fuerzas
internas reales y los desplazamientos internos virtuales compatibles con {𝛿𝐷}.
Esta relación se puede escribir así
𝑇𝑟𝑎𝑏𝑎𝑗𝑜 𝑣𝑖𝑟𝑡𝑢𝑎𝑙 = 𝑒𝑛𝑒𝑟𝑔𝑖𝑎 𝑑𝑒 𝑑𝑒𝑓𝑜𝑟𝑚𝑎𝑐𝑖𝑜𝑛 𝑣𝑖𝑟𝑡𝑢𝑎𝑙
Y que matemáticamente puede expresarse como
G. Aliaga Energía de deformación y trabajo virtual
𝑛
∑ 𝐹𝑖 𝛿𝐷1 = ∫{𝜎}𝑇 {𝛿𝜀}𝑑𝑣 (4.34)
𝑖=1
En este caso la ecuación 4.34 expone que el trabajo virtual externo e interno de
las fuerzas reales al moverse a lo largo de los desplazamientos virtuales es igual.
Es decir
𝑛
∑(𝑓𝑢𝑒𝑟𝑧𝑎 𝑟𝑒𝑎𝑙 𝑒𝑛 𝑖) (𝑑𝑒𝑠𝑝𝑙𝑎𝑧𝑎𝑚𝑖𝑒𝑛𝑡𝑜 𝑣𝑖𝑟𝑡𝑢𝑎𝑙 𝑒𝑛 𝑖)
𝑖01
= ∫(𝑓𝑢𝑒𝑟𝑧𝑎𝑠 𝑖𝑛𝑡𝑒𝑟𝑛𝑎𝑠 𝑟𝑒𝑎𝑙𝑒𝑠𝑠)(𝑑𝑒𝑠𝑝𝑙𝑎𝑧𝑎𝑚𝑖𝑒𝑛𝑡𝑜𝑠 𝑖𝑛𝑡𝑒𝑟𝑛𝑜𝑠 𝑣𝑖𝑟𝑡𝑢𝑎𝑙𝑒𝑠)𝑑𝑣
Cuando se usa el principio del trabajo virtual para calcular un desplazamiento (o
una fuerza), las fuerzas virtuales (o desplazamientos virtuales) se seleccionan de
manera que el segundo miembro de las ecuaciones 4.33 y 4.34 proporcionen
directamente la cantidad deseada. Esto se consigue con el llamado teorema de la
carga unitaria o el teorema de desplazamiento unitario para calcular el
desplazamiento y la fuerza respectivamente.
4.6 Teoremas de carga unitaria y desplazamiento unitario
El principio de las fuerzas virtuales se usa para calcular el desplazamiento 𝐷𝑗
en una coordenada 𝑗 el sistema de fuerzas virtuales {𝛿𝐹𝑖 } se selecciona de tal
manera que solo consista en una fuerza unitaria en la coordenada j. La ecuación
4.33 se reescribe como
𝑇
1 × 𝐷𝑗 = ∫{𝜎𝑢𝑗 } {𝜀}𝑑𝑣
o
𝑇
𝐷𝑗 = ∫{𝜎𝑢𝑗 } {𝜀}𝑑𝑣 (4.35)
Donde 𝜎𝑢𝑗 es el esfuerzo virtual que corresponde a una fuerza virtual unitaria en
𝑗 y ε es la deformación real debida a la carga verdadera. La ecuación 4.35 expresa
G. Aliaga Energía de deformación y trabajo virtual
el teorema de la carga unitaria y es la forma general para calcular
desplazamientos en estructuras de comportamiento lineal y no lineal.
Nótese que cuando se usa como se usa en el teorema de la carga unitaria
transforma un problema geométrico real en un problema de equilibrio ficticio,
El principio de los desplazamientos virtuales se utiliza para determinar la
fuerza en una coordenada j si se conoce la distribución de esfuerzos reales o de
las fuerzas internas. Se supone que la estructura adquiere un desplazamiento
virtual 𝛿𝐷𝑗 en la coordenada j , pero el desplazamiento en los puntos de aplicación
de las fuerzas permanece inalterado. Se determinan los desplazamientos internos
compatibles correspondientes. El trabajo virtual externo e interno de todas las
fuerzas reales al moverse a través de los desplazamientos virtuales es igual, por
lo que la ecuación 4.34 puede escribirse como
𝐹𝑗 × 𝛿𝐷𝑗 = ∫{𝜎}𝑇 {𝛿𝜀}𝑑𝑣 (4.36)
Por lo tanto, {𝜎} representa los esfuerzos reales debidos al sistema de cargas
reales y {𝛿𝜀} representan las deformaciones virtuales compatibles con la
configuración de los desplazamientos virtuales.
En una estructura de comportamiento elástico y lineal, la componente de
deformación en cualquier punto es proporcional a la magnitud del desplazamiento
en j, de modo que
𝛿𝜀 = 𝜀𝑢𝑗 𝛿𝐷 (4.37)
Donde 𝜀𝑢𝑗 es la deformación compatible con un desplazamiento unitario en j. Por
lo tanto la ecuación4.36, resulta ser
𝐹𝑗 = ∫{𝜎}𝑇 {𝜀𝑢𝑗 }𝑑𝑣 (6.38)
G. Aliaga Energía de deformación y trabajo virtual
Esta ecuación se conoce como teorema del desplazamiento unitario y es válido
únicamente para estructuras con comportamiento elástico y lineal debido a la
limitación de la ecuación 4.37.
4.7 Calculo de desplazamientos por trabajo virtual
En esta sección se utiliza el principio de las fuerzas virtuales en la forma del
teorema de la carga unitaria para calcular desplazamientos en estructuras
reticulares (armaduras, pórticos, emparrillados).
Considérese una estructura elástica y lineal (véase figura 4.8) sometida a un
sistema de fuerzas 𝐹1 , 𝐹2 , … , 𝐹𝑛 que originan las fuerzas internas 𝑁, 𝑀, 𝑉 y 𝑇 en
cualquier sección. La magnitud del trabajo externo e interno es igual, de manera
que según las ecuaciones 4.3 y 4.25, tenemos
Coordenada j
Figura 4.8 Estructura elástica y lineal que se usa para ilustrar el cálculo de desplazamiento por
trabajo virtual
𝑛
1 1 𝑁2 1 𝑀2 1 𝑉2 1 𝑇 2 𝑑𝑙
∑ 𝐹𝑖 𝐷𝑖 = ∫ 𝑑𝑙 + ∫ 𝑑𝑙 + ∫ 𝑑𝑙 + ∫ (4.39)
2 2 𝐸𝐴 2 𝐸𝐼 2 𝐺𝐴𝑟 2 𝐺𝐽
1
G. Aliaga Energía de deformación y trabajo virtual
Donde 𝐷𝑖 es el desplazamiento en la ubicación y en la dirección de 𝐹𝑖 y 𝑁, 𝑀, 𝑉 y 𝑇
son las fuerzas internas en cualquier sección debidas al sistema {𝐹}
Supóngase que en el momento en que se aplican las fuerzas {𝐹} a la estructura,
ya existía una fuerza virtual 𝑄𝑗 actuando en la ubicación y en la dirección de la
coordenada 𝑗 (véase figura 4.8). Esta fuerza induce en cualquier sección de la
estructura las fuerzas virtuales internas 𝛿𝑁𝑄𝑗𝑗 , 𝛿𝑀𝑄𝑗 , 𝛿𝑉𝑄𝑗 y 𝛿𝑇𝑄𝑗 . La magnitud del
trabajo externo e interno durante la aplicación de las cargas {𝐹} es también igual
por lo que
𝑛
1 1 𝑁2 1 𝑀2 1 𝑉2 1 𝑇 2 𝑑𝑙
∑ 𝐹𝑖 𝐷𝑖 + 𝑄𝑗 𝐷𝑗 = ∫ 𝑑𝑙 + ∫ 𝑑𝑙 + ∫ 𝑑𝑙 + ∫
2 2 𝐸𝐴 2 𝐸𝐼 2 𝐺𝐴𝑟 2 𝐺𝐽
1
𝛿𝑁𝑄𝑗 𝑁 𝛿𝑀𝑄𝑗 𝑀 𝛿𝑉𝑄𝑗 𝑉 𝛿𝑇𝑄𝑗 𝑇
+∫ 𝑑𝑙 + ∫ 𝑑𝑙 + ∫ 𝑑𝑙 + ∫ 𝑑𝑙 (5.40)
𝐸𝐴 𝐸𝐼 𝐺𝐴𝑟 𝐺𝐽
Donde 𝐷𝑗 es el desplazamiento en 𝑗 debido al sistema {𝐹} en la dirección de la
fuerza virtual 𝑄𝑗 . El segundo término de cada lado de la ecuación 5.40 representa
el trabajo de la fuerza 𝑄𝑗 mientras se mueve a lo largo del desplazamiento
producido por el sistema {𝐹} . El coeficiente ½ no aparece en estos términos
porque la carga 𝑄𝑗 y las fuerzas internas correspondientes actúan a todo su valor
a lo largo del desplazamiento completo causado por el sistema de fuerzas {𝐹}.
Restando la ecuación 4.39 de la ecuación 4.40 obtenemos
𝛿𝑁𝑄𝑗 𝑁 𝛿𝑀𝑄𝑗 𝑀 𝛿𝑉𝑄𝑗 𝑉 𝛿𝑇𝑄𝑗 𝑇
𝑄𝑗 𝐷𝑗 = ∫ 𝑑𝑙 + ∫ 𝑑𝑙 + ∫ 𝑑𝑙 + ∫ 𝑑𝑙 (4.41)
𝐸𝐴 𝐸𝐼 𝐺𝐴𝑟 𝐺𝐽
Para determinar el desplazamiento en cualquier punto y en cualquier dirección
debido al sistema de fuerzas 𝐹 dividimos la ecuación 5.41 entre 𝑄𝑗 , por lo que el
desplazamiento en 𝑗 es
G. Aliaga Energía de deformación y trabajo virtual
𝑁𝑢𝑗 𝑁 𝑀𝑢𝑗 𝑀 𝑉𝑢𝑗 𝑉 𝑇𝑢𝑗 𝑇
𝐷𝑗 = ∫ 𝑑𝑙 + ∫ 𝑑𝑙 + ∫ 𝑑𝑙 + ∫ 𝑑𝑙 (4.42)
𝐸𝐴 𝐸𝐼 𝐺𝐴𝑟 𝐺𝐽
donde
𝛿𝑁𝑄𝑗 𝛿𝑀𝑄𝑗 𝛿𝑉𝑄𝑗 𝛿𝑇𝑄𝑗
𝑁𝑢𝑗 = 𝑁𝑢𝑗 = 𝑁𝑢𝑗 = 𝑁𝑢𝑗 =
𝑄𝑗 𝑄𝑗 𝑄𝑗 𝑄𝑗
Que son los valores de las fuerzas internas en cualquier sección debida a una
fuerza virtual unitaria (𝑄𝑗 = 1) aplicada en la coordenada 𝑗, en donde se necesita
el desplazamiento.
Recordando la ecuación 4.35, podemos ver que la ecuación 6.42 es, de hecho, un
caso particular del teorema de carga unitaria aplicable a estructuras reticulares.
A fin de usar la ecuación 4.42 para la determinación de desplazamientos en
cualquier sección, se deben determinar las fuerzas internas en todas las secciones
de la estructura debidas a: (i) las cargas reales y (ii) una fuerza virtual unitaria. La
última es una fuerza ficticia que se introduce únicamente para el propósito de
análisis. Si el desplazamiento necesario es una traslación, la carga ficticia es una
fuerza unitaria concentrada que actúa en el punto y en la dirección del
desplazamiento necesario. Si el desplazamiento necesario es una rotación giro, la
fuerza unitaria es un par que actúa en la misma dirección y en la misma ubicación
que la rotación deseada. Si se debe hallar la traslación relativa de dos puntos, se
aplican dos cargas unitarias en direcciones opuestas en los puntos dados a lo
largo de la línea que los une. Del mismo modo, si se necesita una rotación relativa,
se aplican dos pares unitarios en direcciones opuestas en los dos puntos.
Las fuerzas internas 𝑁𝑢𝑗 , 𝑀𝑢𝑗 , 𝑉𝑢𝑗 y 𝑇𝑢𝑗 son fuerzas por fuerza virtual unitaria.
Cada uno de los términos del lado derecho de la ecuación 4.42 representa la
contribución de un tipo de fuerzas internas al desplazamiento 𝐷𝑗 . En la mayoría
de los casos prácticos, no están presentes todas las fuerzas internas, por lo que
pueden no necesitarse algunos de los términos de la ecuación 4.42. Además,
algunos de los términos pueden contribuir muy poco en comparación con los otros
y por lo tanto se pueden despreciar. Por ejemplo, en pórticos sometidos a cargas
G. Aliaga Energía de deformación y trabajo virtual
laterales el efecto de las fuerzas axiales y cortantes es muy pequeño comparado
con la flexión. No obstante, este no es el caso de miembros que tienen una
relación alta de espesor a longitud o con secciones transversales de ciertas
formas, en que el desplazamiento debido a la fuerza cortante representa un
porcentaje significativo del total.
4.8 Desplazamiento de armaduras
En una armadura plana o tridimensional compuesta por 𝑏 barras unidos por
articulaciones, con cargas aplicadas solo en los nudos, se generan únicamente
fuerzas axiales en las barras, así la ecuación 4.42 se puede escribir
𝑏
𝑁𝑢𝑗 𝑁
𝐷𝑗 = ∑ ∫ 𝑑𝑙 (4.43)
𝐸𝐴
𝑖=1
En las armaduras la sección transversal de cualquier barra es constante en toda
su longitud; por lo tanto la ecuación 4.43 se puede escribir así
𝑏
𝑁𝑢𝑖𝑗 𝑁𝑖
𝐷𝑗 = ∑ 𝑙 (4.44)
𝐸𝑖 𝐴𝑖 𝑖
𝑖=1
Donde 𝑏 es el número de barras, 𝑁𝑢𝑖𝑗 es la fuerza axial en la barra debida a una
𝑁𝑖 𝑙𝑖
carga unitaria virtual en 𝑗 y ⁄𝐸 𝐴 es el cambio de longitud de una barra
𝑖 𝑖
producida por las cargas reales, suponiendo que el material obedece la ley de
Hooke.
La ecuación 4.44 también se puede escribir en la siguiente forma
𝑏
(4.45)
𝐷𝑗 = ∑ 𝑁𝑢𝑖𝑗 𝛥𝑖
𝑖=1
G. Aliaga Energía de deformación y trabajo virtual
Donde 𝛥𝑖 es el cambio verdadero de longitud de la 𝑖 −ésima barra. La ecuación
4.45 se usa cuando se necesita el desplazamiento debido a causas diferentes a
las cargas, tal como es el caso de una variación de temperatura en algunas
barras. Un incremento o una disminución de temperatura en la 𝑖 −ésima barra de 𝑡
grados causa un cambio de longitud de
𝛥𝑖 = 𝛼𝑡𝑙𝑖 (4.46)
En donde 𝛼 es el coeficiente de expansión térmica y 𝑙𝑖 la longitud de la barra.
La ecuación 4.45 es de uso general: para armaduras de comportamiento lineal o
no lineal.
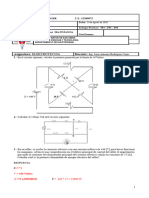
Ejemplo 4.2 La armadura plana de la figura 4.9 está sometida a dos cargas
iguales 𝑃 en 𝐸 y 𝐷. El área de la sección transversal de los miembros marcados
1, 2, 3, 4 y 5 es 𝐴 y la de los miembros 6 y 7 es 1.25𝐴. Determinar el
desplazamiento horizontal 𝐷1 en el nudo 𝐶 y el desplazamiento relativo, 𝐷2 , de los
nudos 𝐵 y 𝐸.
Las fuerzas internas en las barras debidas a la carga real se calculan por simple
estática y se indican en la figura 4.9b. Las fuerzas internas debidas a una carga
virtual unitaria en las coordenadas 𝐷1 y 𝐷2 se indican en las figuras 4.9c y d. Se
consideran como positivas las fuerzas axiales en las barras que trabajan en
tensión, que es la práctica común. Sin embargo el resultado final no altera por la
convención de signos que se use.
G. Aliaga Energía de deformación y trabajo virtual
Figura 4.9 Armadura plana considerada en los ejemplos 4.1 y 4.2
G. Aliaga Energía de deformación y trabajo virtual
Los desplazamientos solicitados (𝐷1 y 𝐷2 ) se calculan con la ecuación 4.44. Es
conveniente ordenar nuestros cálculos en la forma tabular que se muestra a
continuación
Barra Propiedades de la barra Carga real Cálculo de 𝐷1 Cálculo de 𝐷2
Ärea de la
𝑙 𝑁𝑢 𝑁𝑙 𝑁𝑢 𝑁𝑙
Longitud sección 𝑁 𝑁𝑢 𝑁𝑢
𝐸𝐴 𝐸𝐴 𝐸𝐴
transversal
1 1 1 1 1.167 -1 -1.167 -0.8 -0.933
2 1 1 1 1.167 -1 -1.167 0 0
3 0.75 1 0.75 0 0 0 -0.6 0
4 0.75 1 0.75 0 0 0 -0.6 0
5 1 1 1 -1 0 0 -0.8 +0.800
6 1.25 1.25 1 -1.458 0 0 0 0
7 1.25 1.25 1 -0.208 0 0 1 -0.208
𝑙 𝑃𝑙⁄ 𝑃𝑙⁄
Multiplicador 𝑙 𝐴 𝑃 - 𝐸𝐴 - 𝐸𝐴
𝐸𝐴
-2.334 -0.341
La tabla se explica por si sola. Los desplazamientos 𝐷1 y 𝐷2 a la suma de la
columna apropiada de 𝑁𝑢 𝑁𝑙⁄𝐸𝐴. Por lo tanto
𝑃𝑙 𝑃𝑙
𝐷1 = −2.334 𝐷2 = −0.341
𝐸𝐴 𝐸𝐴
El signo negativo de 𝐷1 indica que el desplazamiento es en el sentido opuesto al
de la carga virtual en la figura 4.9c. Es decir el desplazamiento horizontal del nudo
C es hacia la derecha. Similarmente, el signo negativo de 𝐷2 nos dice que el
desplazamiento relativo de B y E es opuesto a los sentidos de las fuerzas
virtuales de la figura 4.9c, es decir, los nudos se alejan.
Ejemplo 4.2 Para la misma armadura de la figura 4.9ª, encontrar el
desplazamiento 𝐷2 debido a un aumento de temperatura de 40° en las barras 3, 5
y 6. En este caso no están actuando las cargas 𝑃. El coeficiente de expansión
térmica es 𝛼 = 1.2 × 10−5 por grado
G. Aliaga Energía de deformación y trabajo virtual
Solución Se aplica una carga virtual unitaria (véase figura 4.9c), la misma que
indica las fuerzas que se producen en todas las barras.
El cambio real de longitud ocurre solo en las barras 3, 5 y 6, así de acuerdo con la
ecuación 4.46 se tiene
𝛥3 = 1.2 × 10−5 × 50 × 0.75𝑙 = 37.5 × 10−5 𝑙
𝛥5 = 1.2 × 10−5 × 50 × 𝑙 = 16 × 10−5 𝑙
𝛥6 = 1.2 × 10−5 × 50 × 1.25𝑙 = 75 × 10−5 𝑙
Luego de acuerdo con la ecuación 4.45 se tiene
𝐷2 = ∑ 𝑁𝑢𝑖2 𝛥𝑖
𝑖=3,5,6
𝐷2 = −0.6(37.5 × 10−5 𝑙) − 0.8(16 × 10−5 𝑙) + 0(75 × 10−5 𝑙) = −35.310−5 𝑙
4.9. Desplazamientos en vigas y pórticos
Las principales fuerzas internas en vigas y pórticos planos son los momentos
flectores, las fuerzas cortantes y las fuerzas axiales sin presciencia de momentos
torsores. Además la fuerza normales contribuye muy poco a los desplazamientos
de traslación y rotación. Por esta, razón, en la mayoría de los casos, los términos
de la ecuación 4.42 que representan la contribución de la fuerza axial y la torsión
se pueden omitir cuando se calculan los desplazamientos. Se deduce que el
desplazamiento en vigas sometidas a carga transversal se obtiene por
𝑀𝑢𝑗 𝑀 𝑉𝑢𝑗 𝑉
𝐷𝑗 = ∫ 𝑑𝑙 + ∫ 𝑑𝑙 (4.47)
𝐸𝐼 𝐺𝐴𝑟
Además, la sección transversal de las vigas, que por lo general se usan en la
práctica, es tal que la aportación de la fuerza cortante a los desplazamientos es
pequeña y se puede despreciar. Por lo tanto, el desplazamiento está dado por
G. Aliaga Energía de deformación y trabajo virtual
𝑀𝑢𝑗 𝑀
𝐷𝑗 = ∫ 𝑑𝑙 (4.48)
𝐸𝐼
Ejemplo 4.3
La figura 4.10 muestra una viga ABC con un extremo de voladizo. Encontrar el
desplazamiento vertical 𝐷1 en C y la rotación angular 𝐷2 en A. La viga tiene una
rigidez a la flexión EI constante. Solo se necesita la deformación producida por la
flexión
3q por unidad de longitud
Multiplicador: qb2
(d)
Multiplicador: b2
(e)
Figura 4.10 Viga analizada en el ejemplo 4.3. (a) Viga. (b) Sistema coordenado. (c) Diagrama de
momentos. (d)Diagrama de 𝑀𝑢1 (e) Diagrama de 𝑀𝑢2
G. Aliaga Energía de deformación y trabajo virtual
4.10 Teoremas de energía importantes
A continuación se exponen algunos teoremas de energía importantes para la
mecánica estructural.
4.10.1 Teoremas recíprocos de Betti y de Maxwell
Considérese cualquier estructura, tal como la que se muestra en la figura 4.10a,
con un sistema de coordenadas 1, 2, … , 𝑛. 𝑛 + 1, 𝑛 + 2, … , 𝑚. El sistema de 𝐹 de
fuerzas 𝐹1 , 𝐹2 , … , 𝐹𝑛 actúan en las coordenadas 1 a 𝑛 (figura 4.10b) y el sistema 𝑄
de fuerzas 𝑄1 , 𝑄2 , … , 𝑄𝑚 actúa en las coordenadas 𝑛 + 1 a 𝑚 (figura 4.10c). Los
desplazamientos producidos por el sistema 𝐹 solo son {𝐷1𝐹 , 𝐷2𝐹 , … , 𝐷𝑚𝐹 } y los
desplazamientos producidos por el sistema 𝑄 sólo son {𝐷1𝑄 , 𝐷2𝑄 , … , 𝐷𝑚𝑄 }
Figura 4.10. Teorema de Betti. (a)n Sistema de coordenadas. (b) Sistema de fuerzas 𝐹 actuando
en las coordenadas 1, 2, … , 𝑛; causando los desplazamientps: 𝐷1𝐹 , 𝐷2𝐹 , … , 𝐷𝑚𝐹 . (c) Sistema de
fuerzas 𝑄 actuando en las coordenadas 𝑛 + 1, 𝑛 + 2, … , 𝑚; causando los
desplazamientos: 𝐷1𝑄 , 𝐷2𝑄 , … , 𝐷𝑚𝑄 .
Supóngase que el sistema 𝐹 se aplica sólo a la estructura. El trabajo interno y el
trabaj9o externo son iguales, de modo que (Véanse las ecuaciones 4.1 y 4.14)
𝑛
1 1
∑ 𝐹𝑖 𝐷𝑖𝐹 = ∫ {𝜎}𝑇𝐹 {𝜀}𝐹 𝑑𝑣 (4.48)
2 2 𝑣
1
Donde {𝜎}𝐹 y {𝜀}𝐹 son el esfuerzo y la deformación producidos por el sistema 𝐹
G. Aliaga Energía de deformación y trabajo virtual
Imagínese ahora que cuando se aplica el sistema F a la estructura, el sistema Q
ya está actuando y produciendo esfuerzos {𝜎}𝑄 en cualquier punto. Nuevamente,
los trabajos externo e interno durante la aplicación del sistema F son iguales, así
se tiene
𝑛 𝑚
1 1
∑ 𝐹𝑖 𝐷𝑖𝐹 + ∑ 𝑄𝑖 𝐷𝑖𝐹 = ∫ {𝜎}𝑇𝐹 {𝜀}𝐹 𝑑𝑣 + ∫ {𝜎}𝑇𝑄 {𝜀}𝐹 𝑑𝑣 (4.49)
2 2 𝑣 𝑣
1 𝑛+1
El segundo término de cada miembro de esta ecuación es el trabajo debido al
sistema Q mientras se mueve a lo largo delos desplazamiento producido por el
sistema F. De las ecuaciones 4.48 y 4.49
∑ 𝑄𝑖 𝐷𝑖𝐹 = ∫ {𝜎}𝑇𝑄 {𝜀}𝐹 𝑑𝑣 (4.50)
𝑖=𝑛+1 𝑣
Supóngase ahora que primero se aplica el sistema F, que causa esfuerzos {𝜎}𝐹 y
en seguida se aplica el sistema Q, que causa los esfuerzos adicionales {𝜎}𝑄 se
obtiene una ecuación similar
∑ 𝐹𝑖 𝐷𝑖𝑄 = ∫ {𝜎}𝑇𝐹 {𝜀}𝑄 𝑑𝑣 (4.51)
𝑖=1 𝑣
Si el material obedece la ley de Hooke, {𝜀}𝑄 = [𝜖]{𝜎}𝑄 y , {𝜀}𝑓 = [𝜖]{𝜎}𝑓 donde [𝜖]
es constante (véanse las ecuaciones 4.8 y 4.12). Consecuentemente, sustituyendo
por {𝜀} en las ecuaciones 4.50 y 4.51, se encuentra que los miembros de la
derecha de las dos ecuaciones son iguales, luego se tiene
𝑛 𝑚
∑ 𝐹𝑖 𝐷𝑖𝑄 = ∑ 𝑄𝑖 𝐷𝑖𝐹 (4.52)
𝑖=1 𝑖=𝑛+1
G. Aliaga Energía de deformación y trabajo virtual
Esta ecuación se conoce como Teorema de Betti, y se puede enunciar como. “ La
suma de los productos de las fuerzas del sistema 𝐹 y los desplazamientos en las
coordenadas correspondientes producidos por el sistema 𝑄 es igual a la suma de
los productos de las fuerzas del sistema 𝑄 y los desplazamientos en las
coordenadas correspondientes producidos por el sistema 𝐹. El teorema sólo es
aplicable a estructuras de comportamiento elástico y lineal.
Consideremos ahora el teorema de Maxwell, que es un caso particular del
teorema general de Betti. Supóngase que solo hay una fuerza 𝐹𝑖 = 1 en el sistema
𝐹 actuando en la coordenada 𝑖 y una fuerza 𝑄𝑗 = 1 en el sistema 𝑄 actuando en
la coordenada 𝑗. Aplicando la ecuación 4.52, se tiene
𝐷𝑖𝑄 = 𝐷𝑗𝐹 (4.53)
La ecuación 4.52 se puede escribir como
𝑓𝑖𝑗 = 𝑓𝑗𝑖 (4.54)
Donde 𝑓𝑖𝑗 es el desplazamiento en 𝑖 debido a una fuerza unitaria en 𝑗 y 𝑓𝑗𝑖 es el
desplazamiento en 𝑗 debido a una fuerza unitaria en 𝑖. La ecuación 4.54, expresa
el teorema reciproco de Maxwell, que se enuncia como: “En una estructura
elástica y lineal, el desplazamiento en la coordenada 𝑖 debido a una fuerza unitaria
en la cooordenada j es igual al desplazamiento en la coordenada 𝑗 debido a una
fuerza unitaria en actuando en 𝑖”.
Ejemplo 4.4 (a) Calcular el desplazamiento vertical 𝐷1 del nudo 3 en el pórtico
mostrado en la figura. Tómese la rigidez a la flexión EI= 28.8x10 3 kN.m2 igual para
todos los miembros. (b) Si la carga vertical de 32 kN se aplica en el nudo 3 en lugar del
nudo 2, ¿cual es el desplazamiento vertical del nudo 2?
G. Aliaga Energía de deformación y trabajo virtual
4.10.2 Teorema de Castigliano
El teorema de Catigliano sirve para la determinación de desplazamientos en una
estructura y cuyo enunciado es: “La derivada parcial de la energía de deformación
de un sistema respecto a la fuerza es igual al desplazamiento del punto del punto
de aplicación de la fuerza en la dirección a ella”
G. Aliaga Energía de deformación y trabajo virtual
G. Aliaga Energía de deformación y trabajo virtual
G. Aliaga Energía de deformación y trabajo virtual
Ejemplo 4.5 Determinar el desplazamiento vertical del punto A para la armadura
plana mostrada en la figura. La rigidez axial de todos los miembros son iguales a
EA
G. Aliaga Energía de deformación y trabajo virtual
G. Aliaga Energía de deformación y trabajo virtual
Вам также может понравиться
- Sala de ExposiciónДокумент3 страницыSala de Exposiciónfelipe pagan montesОценок пока нет
- SALA DE EXPOSICIÓN GuardarДокумент9 страницSALA DE EXPOSICIÓN Guardarfelipe pagan montesОценок пока нет
- Energia de Deformacion y Trabajo VirtualДокумент43 страницыEnergia de Deformacion y Trabajo Virtualfelipe pagan montesОценок пока нет
- La Mecánica de Suelos - Semana 1Документ9 страницLa Mecánica de Suelos - Semana 1felipe pagan montesОценок пока нет
- FormulasДокумент5 страницFormulasfelipe pagan montesОценок пока нет
- Conclusion EsДокумент1 страницаConclusion Esfelipe pagan montesОценок пока нет
- Desarrollo Economico en MexicoДокумент6 страницDesarrollo Economico en Mexicofelipe pagan montes100% (1)
- Apunte de Clase Electricidad y Máquinas Eléctricas DCCA02 V-ARO-N2-P1-C2Документ52 страницыApunte de Clase Electricidad y Máquinas Eléctricas DCCA02 V-ARO-N2-P1-C2Eduardo Epuante Limpieza de TapiceriaОценок пока нет
- Facultad de Ingeniería Química Horarios Del Semestre 2020-2020 Primer SemestreДокумент12 страницFacultad de Ingeniería Química Horarios Del Semestre 2020-2020 Primer SemestreJosephiel RodmithОценок пока нет
- Polímeros ConductoresДокумент17 страницPolímeros ConductoresalexlakimikapestaОценок пока нет
- Ley de Enfriamiento de Newton-InformeДокумент16 страницLey de Enfriamiento de Newton-InformeLucero DiazОценок пока нет
- Destilacion BatchДокумент5 страницDestilacion Batchmaka12345Оценок пока нет
- Resumen Capítulo 2 Nilson - Hormigón PretensadoДокумент3 страницыResumen Capítulo 2 Nilson - Hormigón PretensadoGalo SerranoОценок пока нет
- MAMPARA PresupuestoДокумент7 страницMAMPARA Presupuestoluis.marono.1958Оценок пока нет
- Trabajo de Cojinete UgmaДокумент5 страницTrabajo de Cojinete UgmaCarlos GuillermoОценок пока нет
- Qué Es Un Fármaco Polimórfico y Que Métodos Existen para Su DetecciónДокумент6 страницQué Es Un Fármaco Polimórfico y Que Métodos Existen para Su DetecciónJose David Perez NavarroОценок пока нет
- Practica 7 (Erazo Duran Jose Luis)Документ17 страницPractica 7 (Erazo Duran Jose Luis)Jose Luis Erazo DuranОценок пока нет
- Final Electro 2020Документ6 страницFinal Electro 2020Elmer Caceres floresОценок пока нет
- Evaporacion - InformeДокумент10 страницEvaporacion - InformeDanco C-CortezОценок пока нет
- Actividades ElectricidadДокумент10 страницActividades ElectricidadJulián MoralesОценок пока нет
- Cuarta Practica Relaciones VirДокумент12 страницCuarta Practica Relaciones Virareli lopezОценок пока нет
- Las AletasДокумент6 страницLas AletasRoberto García LópezОценок пока нет
- UNSA Silabo F3 IngElectrónicaДокумент6 страницUNSA Silabo F3 IngElectrónicaMichael AbarcaОценок пока нет
- Propiedades Electricas de Los SolesДокумент4 страницыPropiedades Electricas de Los SolesNohely Arteaga AriasОценок пока нет
- Biomateriales TareaДокумент3 страницыBiomateriales TareaGerald EsquiviasОценок пока нет
- Formacion de Viruta PDFДокумент31 страницаFormacion de Viruta PDFManuel ColinОценок пока нет
- Serie Ejerc 4 Termo 2017Документ4 страницыSerie Ejerc 4 Termo 2017Alejandro Perez AlvarezОценок пока нет
- Guia Solidos 3Документ2 страницыGuia Solidos 3ivanОценок пока нет
- Ensayo de Tensión o TracciónДокумент10 страницEnsayo de Tensión o TracciónmichelmamaniОценок пока нет
- Equilibrio MaterialДокумент28 страницEquilibrio MaterialDome ObandoОценок пока нет
- QF1 Tema1 ProbДокумент5 страницQF1 Tema1 ProbÁLvaro Salsavilca CayetanoОценок пока нет
- Doble Masa MaceracionДокумент2 страницыDoble Masa MaceracionJuan Sebastian Leon OrjuelaОценок пока нет
- Laboratorio 4-2da Parte Tinkercad Fundamentos Del Transistor BJTДокумент15 страницLaboratorio 4-2da Parte Tinkercad Fundamentos Del Transistor BJTBeatrizОценок пока нет
- Resistencia Total de Un CircuitoДокумент4 страницыResistencia Total de Un CircuitoAdrian GilОценок пока нет
- T4 Leyes ComportamientoДокумент14 страницT4 Leyes ComportamientoRoly Campos HerreraОценок пока нет
- IIIДокумент15 страницIIIOmar MelaraОценок пока нет