Вам также может понравиться
- Thermo Active Building SystemsДокумент11 страницThermo Active Building SystemsShakir ShaikhОценок пока нет
- 08 15 Hvacr 003 PDFДокумент3 страницы08 15 Hvacr 003 PDFjewdОценок пока нет
- Homod 2014Документ13 страницHomod 2014Paul KОценок пока нет
- 10 1016@j Apenergy 2011 03 013Документ10 страниц10 1016@j Apenergy 2011 03 013VIKNESWARAN S KОценок пока нет
- Energy conservation improvement and ON–OFF switch times reduction for an existing VFD-fan-based cooling towerДокумент9 страницEnergy conservation improvement and ON–OFF switch times reduction for an existing VFD-fan-based cooling towerAmir AbbaszadehОценок пока нет
- 02 16 Hvac 002Документ4 страницы02 16 Hvac 002David MartinОценок пока нет
- Ma2011 PDFДокумент14 страницMa2011 PDFVignesh RamakrishnanОценок пока нет
- Experimental Study On An ITM System For EVДокумент12 страницExperimental Study On An ITM System For EVWoke BlokeОценок пока нет
- Yu 2013Документ12 страницYu 2013marvincabalesОценок пока нет
- Modeling of Low Voltage Switchgear and Controlgear Assemblies Using Computational Fluid Dynamics - 465-147668798701-06Документ6 страницModeling of Low Voltage Switchgear and Controlgear Assemblies Using Computational Fluid Dynamics - 465-147668798701-06Bao LamОценок пока нет
- Fuzzy Logic Based Direct Load Control Scheme For Air Conditioning Load To Reduce Energy ConsumptionДокумент18 страницFuzzy Logic Based Direct Load Control Scheme For Air Conditioning Load To Reduce Energy ConsumptionK.YogeshОценок пока нет
- Method For Estimating Energy Savings Potential of Chilled-Water Plant Retro-CommissioningДокумент13 страницMethod For Estimating Energy Savings Potential of Chilled-Water Plant Retro-CommissioningjoasobralОценок пока нет
- Thermal Modelling For Dynamic Transformer Rating in Low Carbon Distribution Network OperationДокумент6 страницThermal Modelling For Dynamic Transformer Rating in Low Carbon Distribution Network Operationbpd21Оценок пока нет
- Voltage Effects On The Efficiency of Hermetically Sealed Reciprocating CompressorsДокумент4 страницыVoltage Effects On The Efficiency of Hermetically Sealed Reciprocating CompressorsMarcio Antonio SensОценок пока нет
- Temperature Control of Reheating Furnace Based On Distributed Model Predictive ControlДокумент6 страницTemperature Control of Reheating Furnace Based On Distributed Model Predictive ControlRodrigo LimaОценок пока нет
- Evaluation of Variable Volume and and Tempreature in Hvac SystemДокумент11 страницEvaluation of Variable Volume and and Tempreature in Hvac Systemاحمد الجزار2007Оценок пока нет
- Jurnal ReviewДокумент42 страницыJurnal Reviewdiarfahreza89Оценок пока нет
- Energy Management Impact in A Small Office Building: Ashrae JournalДокумент7 страницEnergy Management Impact in A Small Office Building: Ashrae JournalRafael Echano AcederaОценок пока нет
- Effects of Refrigerant Pipeline Length on Dual-Evaporator AC System PerformanceДокумент11 страницEffects of Refrigerant Pipeline Length on Dual-Evaporator AC System PerformanceArifRahmanОценок пока нет
- A Model of Cogeneration Plants Based On Small Size Gas Turbines - 00943000Документ4 страницыA Model of Cogeneration Plants Based On Small Size Gas Turbines - 00943000Anndy TancaОценок пока нет
- 1 s2.0 S0378775321008296 MainДокумент9 страниц1 s2.0 S0378775321008296 Mainimagine dragonОценок пока нет
- Evaluating Variable Air Volume (VAV) Packaged Rooftop Systems For Use in High Performance EnvironmentsДокумент11 страницEvaluating Variable Air Volume (VAV) Packaged Rooftop Systems For Use in High Performance Environmentsramon duldulaoОценок пока нет
- Research ArticleДокумент35 страницResearch ArticleHamo HamoОценок пока нет
- Applied Energy: Chang-Soon Kang, Chang-Ho Hyun, Mignon ParkДокумент14 страницApplied Energy: Chang-Soon Kang, Chang-Ho Hyun, Mignon ParkpedroyprОценок пока нет
- Applied Thermal Engineering 2Документ10 страницApplied Thermal Engineering 2dima2000Оценок пока нет
- Applied Thermal Engineering: N. Pardo, Á. Montero, J. Martos, J.F. UrchueguíaДокумент5 страницApplied Thermal Engineering: N. Pardo, Á. Montero, J. Martos, J.F. UrchueguíaMatías Correa AranedaОценок пока нет
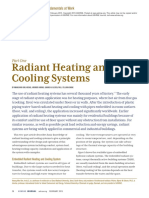
- Radiant Heating and Cooling SystemДокумент8 страницRadiant Heating and Cooling SystemLaurentiuОценок пока нет
- 6026 PDFДокумент6 страниц6026 PDFManikanta SwamyОценок пока нет
- Supply Fan Control For Constant Air Volume Air Handling UnitsДокумент6 страницSupply Fan Control For Constant Air Volume Air Handling UnitskdpmansiОценок пока нет
- Optimal Scheduling of Smart Homes AppliancesДокумент4 страницыOptimal Scheduling of Smart Homes Appliancesjorbol827Оценок пока нет
- 399icrre 111 PDFДокумент6 страниц399icrre 111 PDFDave ChaudhuryОценок пока нет
- Control of Building Storage Systems Using Both Ice Storage and Thermal MassДокумент10 страницControl of Building Storage Systems Using Both Ice Storage and Thermal MassLucas LiraОценок пока нет
- Peak Load Reduction and Load Shaping in HVAC and Refrigeration Sy - 2020 - AppliДокумент11 страницPeak Load Reduction and Load Shaping in HVAC and Refrigeration Sy - 2020 - AppliMubashir 8Оценок пока нет
- Malfunction Detection of The Cooling System in Air-Forced Power Transformers Using Online Thermal MonitoringДокумент11 страницMalfunction Detection of The Cooling System in Air-Forced Power Transformers Using Online Thermal MonitoringДенис ЛяпуновОценок пока нет
- New Optimization Modules For Electrode Control Systems of Ac Electric Arc FurnacesДокумент12 страницNew Optimization Modules For Electrode Control Systems of Ac Electric Arc FurnacesIgor100% (1)
- Advanced Heat Exchanger Design, Performance, Inspection, Maintenance and TroubleshootingДокумент6 страницAdvanced Heat Exchanger Design, Performance, Inspection, Maintenance and TroubleshootingShahzad AhmedОценок пока нет
- Design and Performance Evaluation of A Dual-Circuit Thermal Energy Storage Module For Air ConditionersДокумент12 страницDesign and Performance Evaluation of A Dual-Circuit Thermal Energy Storage Module For Air ConditionersSrinivas RaghavanОценок пока нет
- Encyclopedia of Separation Science Part 2 (Elsevier)Документ1 011 страницEncyclopedia of Separation Science Part 2 (Elsevier)Pedro Javier Vargas MachadoОценок пока нет
- Energy ManagementДокумент8 страницEnergy ManagementrezokaОценок пока нет
- Tianzhen Hong - Development and Validation of A New Variable Refrigerant Flow System Model in EnergyplusДокумент14 страницTianzhen Hong - Development and Validation of A New Variable Refrigerant Flow System Model in EnergyplusMalek AqlanОценок пока нет
- Heat Pipe BasedДокумент14 страницHeat Pipe BasedSaicharanreddy VakaОценок пока нет
- Demand Control Ventilation Influence ofДокумент31 страницаDemand Control Ventilation Influence ofJamesОценок пока нет
- Demand Response by Aggregates of Domestic Water Heaters With Adaptive Model Predictive ControlДокумент5 страницDemand Response by Aggregates of Domestic Water Heaters With Adaptive Model Predictive ControlJaspreetSinghОценок пока нет
- Jten 2016 2 5.1038Документ7 страницJten 2016 2 5.1038Tuấn BkerОценок пока нет
- Zonal Thermal Model of Distribution Transformer Cooling EnriqueДокумент12 страницZonal Thermal Model of Distribution Transformer Cooling EnriqueDIEGO ALAN MIRANDA ESCAMILLAОценок пока нет
- Wet and Dry Cooling Systems OptimizationДокумент11 страницWet and Dry Cooling Systems OptimizationlightsonsОценок пока нет
- 1999arguello Serrano BДокумент9 страниц1999arguello Serrano BJorge Alejandro Martinez HerreraОценок пока нет
- 2012 - PNNL - An Evaluation of The HVAC Load Potential For Providing Load Balancing ServiceДокумент8 страниц2012 - PNNL - An Evaluation of The HVAC Load Potential For Providing Load Balancing ServiceBeltus NkwawirОценок пока нет
- Selecting Distribution-Transformer Size: Member AieeДокумент6 страницSelecting Distribution-Transformer Size: Member AieeMikhaelRodriguezОценок пока нет
- Ahmad (1991)Документ24 страницыAhmad (1991)Roody908Оценок пока нет
- ASHRAE Guideline 36-2018-ASHRAE_Journal_-_Making_VAV_Great_AgainДокумент6 страницASHRAE Guideline 36-2018-ASHRAE_Journal_-_Making_VAV_Great_AgainSergio Motta GarciaОценок пока нет
- Dynamic Thermal Transformer 2019 MOMBELLOДокумент11 страницDynamic Thermal Transformer 2019 MOMBELLOgloria ceronОценок пока нет
- Chen 2014Документ11 страницChen 2014hosseinОценок пока нет
- Energies-16-03808Документ26 страницEnergies-16-03808Vinit MehtaОценок пока нет
- Changes To ASHRAE 2013 Technical Bulletin LL March 2014 - 508Документ1 страницаChanges To ASHRAE 2013 Technical Bulletin LL March 2014 - 508prashant.jadhavОценок пока нет
- 1 s2.0 S1359431116335037 MainДокумент10 страниц1 s2.0 S1359431116335037 MainFernando GarnicaОценок пока нет
- Thermal Modeling of Electrical TransformersДокумент6 страницThermal Modeling of Electrical TransformersMUKESH KUMARОценок пока нет
- Thermal Energy Storage in Office BuildingsДокумент42 страницыThermal Energy Storage in Office BuildingsnorshadiaОценок пока нет
- Thermodynamic Performance of Molten Salt Heat StorДокумент6 страницThermodynamic Performance of Molten Salt Heat Stormxc2425Оценок пока нет
- Sustainability and EE in BuildingsДокумент54 страницыSustainability and EE in BuildingsSimonОценок пока нет
- Fire Rating Certificate FRKДокумент2 страницыFire Rating Certificate FRKSimonОценок пока нет
- Exitile Access PanelДокумент1 страницаExitile Access PanelSimonОценок пока нет
- Heatpumpguide Sept03Документ30 страницHeatpumpguide Sept03SimonОценок пока нет
- Smacna LeakageДокумент10 страницSmacna Leakagekothat82Оценок пока нет
- Utility Services - Water and Sanitation - Sanitation - Consumptive (10 Percent)Документ4 страницыUtility Services - Water and Sanitation - Sanitation - Consumptive (10 Percent)SimonОценок пока нет
- White River Municipality Fire Brigade By-LawsДокумент8 страницWhite River Municipality Fire Brigade By-LawsSimonОценок пока нет
- Quick Guide Green Design Attributes Cards 2008Документ93 страницыQuick Guide Green Design Attributes Cards 2008SimonОценок пока нет
- City Mbombela - Standard By-Laws Relating To Fire Brigade ServicesДокумент8 страницCity Mbombela - Standard By-Laws Relating To Fire Brigade ServicesSimonОценок пока нет
- DPW Guide for Architects on Drainage, Water Supply & Storm WaterДокумент28 страницDPW Guide for Architects on Drainage, Water Supply & Storm Waterkasandra01Оценок пока нет
- White Paper - Consequences of Inappropriate Use of Ventilation Systems in Indoor Swimming Pool ConditionsДокумент8 страницWhite Paper - Consequences of Inappropriate Use of Ventilation Systems in Indoor Swimming Pool ConditionsSimon100% (1)
- 5 Defrost Methods For Commercial RefrigerationДокумент14 страниц5 Defrost Methods For Commercial RefrigerationSimonОценок пока нет
- By-Law - Community Fire Safety City of Cape TownДокумент95 страницBy-Law - Community Fire Safety City of Cape TownSimonОценок пока нет
- City of Cape Town - Automatic Sprinkler Fire Extinguishing SystemДокумент12 страницCity of Cape Town - Automatic Sprinkler Fire Extinguishing SystemSimonОценок пока нет
- How Hot-Dip Galvanising WorksДокумент1 страницаHow Hot-Dip Galvanising WorksSimonОценок пока нет
- HVAC, Ductwork, CoatingДокумент6 страницHVAC, Ductwork, CoatingwvwintersОценок пока нет
- SANS 241 Drinking Water RequirementsДокумент2 страницыSANS 241 Drinking Water RequirementsSimon100% (1)
- 3 Simple Approaches To Energy Efficiency PDFДокумент7 страниц3 Simple Approaches To Energy Efficiency PDFSimonОценок пока нет
- 13 Tips From Energy Star SchoolsДокумент9 страниц13 Tips From Energy Star SchoolsSimonОценок пока нет
- Government Gazette: Construction Regulations 2014Документ58 страницGovernment Gazette: Construction Regulations 2014SimonОценок пока нет
- 15 SmacnaДокумент9 страниц15 Smacnaarln_605551822Оценок пока нет
- 13 Tips From Energy Star SchoolsДокумент9 страниц13 Tips From Energy Star SchoolsSimonОценок пока нет
- Properly Sizing Unitary EquipmentДокумент3 страницыProperly Sizing Unitary EquipmentSimonОценок пока нет
- SДокумент1 страницаSCarlos SYОценок пока нет
- Solarshield GlassДокумент2 страницыSolarshield GlassSimonОценок пока нет
- Applying Schedules and Profiles in HAP: QB Tip 001Документ6 страницApplying Schedules and Profiles in HAP: QB Tip 001maheshОценок пока нет
- ECSA Guideline Fees 2016Документ48 страницECSA Guideline Fees 2016SimonОценок пока нет
- ST Diamond BuildingДокумент12 страницST Diamond BuildingChan Agnes100% (2)
- Passive Cooling Solutions For Residential Buildings in Pabal, Maharashtra, IndiaДокумент32 страницыPassive Cooling Solutions For Residential Buildings in Pabal, Maharashtra, IndiaEngineers Without Borders UK100% (1)
- Panasonic Sky Series and Aero Series Air ConditionersДокумент20 страницPanasonic Sky Series and Aero Series Air ConditionersAdityo RahmanОценок пока нет
- Diamond BuildingДокумент54 страницыDiamond BuildingBery Fitrian100% (2)
- Study of Radiant Cooling in Buildings Using CFDДокумент6 страницStudy of Radiant Cooling in Buildings Using CFDAli AHОценок пока нет
- Roof PondДокумент23 страницыRoof PondVasu GandhiОценок пока нет
- Research Title: Nocturnal Cooling of Water For Radiant Cooling in Malaysian BuildingДокумент24 страницыResearch Title: Nocturnal Cooling of Water For Radiant Cooling in Malaysian BuildingSiti Nor FazilahwatiОценок пока нет
- Sustainability in Action - Rohan ParikhДокумент31 страницаSustainability in Action - Rohan ParikhpsridharpОценок пока нет
- Radiant Cooling Technology-InvensysДокумент8 страницRadiant Cooling Technology-InvensysJavier BaronaОценок пока нет
- Radiant CoolingДокумент23 страницыRadiant CoolingnrnnadigОценок пока нет
- Radiant Ceiling CoolingДокумент2 страницыRadiant Ceiling CoolingAmit BharadwajОценок пока нет
- The CH2 Building (Melbourne, Australia)Документ8 страницThe CH2 Building (Melbourne, Australia)Blessing Mukome100% (2)
- Uponor Radiant Cooling ManualДокумент58 страницUponor Radiant Cooling ManualGururaman Raman100% (1)
- Ize04001a HKGSG v1 02manualДокумент46 страницIze04001a HKGSG v1 02manualfebime100% (1)
- THERMO 4 Aswandi AlamДокумент13 страницTHERMO 4 Aswandi AlamAhmad S AminudinОценок пока нет
- Doas DesignДокумент4 страницыDoas DesignBill ChambersОценок пока нет
- Introduction To Radiant Cooling SystemДокумент36 страницIntroduction To Radiant Cooling SystemJayashree ArumugamОценок пока нет
- Performance Study Radiant PanelsДокумент15 страницPerformance Study Radiant PanelsΔημητρηςΣαρακυρουОценок пока нет
- Building and Environment: Y.L. Yin, R.Z. Wang, X.Q. Zhai, T.F. IshugahДокумент9 страницBuilding and Environment: Y.L. Yin, R.Z. Wang, X.Q. Zhai, T.F. IshugahTheen BadhushОценок пока нет
- Selecting Supply Air Conditions for a Dedicated Outdoor Air System (DOASДокумент10 страницSelecting Supply Air Conditions for a Dedicated Outdoor Air System (DOASrkibОценок пока нет
- Hvac Volume3 Final ReportДокумент281 страницаHvac Volume3 Final ReportDeepak DasОценок пока нет
- Catalog 2017 LowДокумент18 страницCatalog 2017 LowPeeWee Mbah ManОценок пока нет
- The Story of Comfort Air Conditioning: Part-3 Air Conditioned Office Buildings, 1940-1978Документ22 страницыThe Story of Comfort Air Conditioning: Part-3 Air Conditioned Office Buildings, 1940-1978zahid_hameed_13Оценок пока нет
- RCDM Manual RC03 0513 52020red PDFДокумент230 страницRCDM Manual RC03 0513 52020red PDFRaji PanickerОценок пока нет
- Thermally-active building systems for radiant cooling in extreme climatesДокумент7 страницThermally-active building systems for radiant cooling in extreme climatesalpha607Оценок пока нет
- Construction of a Pasig Riverside Green Building condominiumДокумент38 страницConstruction of a Pasig Riverside Green Building condominiumMehrad SarabandiОценок пока нет
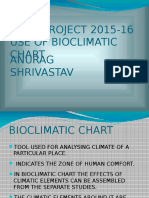
- Term Project: Use of Bioclimatic ChartДокумент16 страницTerm Project: Use of Bioclimatic ChartANURAG SHRIVASTAV ce14b0050% (1)
- Prequalif Doc Contractor Construction RECHQДокумент43 страницыPrequalif Doc Contractor Construction RECHQNazir Hussain100% (1)
- ASHRAE Seminars JEFBOL 2013-10-01 Abridged MSOДокумент68 страницASHRAE Seminars JEFBOL 2013-10-01 Abridged MSOMIGUELОценок пока нет
- Unit 3 XX Passive CoolingДокумент114 страницUnit 3 XX Passive CoolingtinabhuvanОценок пока нет
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionОт EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Handbook of Mechanical and Materials EngineeringОт EverandHandbook of Mechanical and Materials EngineeringРейтинг: 5 из 5 звезд5/5 (4)
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseОт EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseРейтинг: 4.5 из 5 звезд4.5/5 (50)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsОт EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsОценок пока нет
- Quantum Mechanics 4: Spin, Lasers, Pauli Exclusion & Barrier PenetrationОт EverandQuantum Mechanics 4: Spin, Lasers, Pauli Exclusion & Barrier PenetrationРейтинг: 1 из 5 звезд1/5 (1)
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedОт EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedРейтинг: 5 из 5 звезд5/5 (1)
- Piping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationОт EverandPiping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationРейтинг: 4 из 5 звезд4/5 (18)
- The Laws of Thermodynamics: A Very Short IntroductionОт EverandThe Laws of Thermodynamics: A Very Short IntroductionРейтинг: 4.5 из 5 звезд4.5/5 (10)
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsОт EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsРейтинг: 3.5 из 5 звезд3.5/5 (3)
- Introduction to Applied Thermodynamics: The Commonwealth and International Library: Mechanical Engineering DivisionОт EverandIntroduction to Applied Thermodynamics: The Commonwealth and International Library: Mechanical Engineering DivisionРейтинг: 2.5 из 5 звезд2.5/5 (3)
- Control of Power Electronic Converters and Systems: Volume 1От EverandControl of Power Electronic Converters and Systems: Volume 1Рейтинг: 5 из 5 звезд5/5 (1)
- Machinery Failure Analysis Handbook: Sustain Your Operations and Maximize UptimeОт EverandMachinery Failure Analysis Handbook: Sustain Your Operations and Maximize UptimeРейтинг: 3.5 из 5 звезд3.5/5 (4)
- Rolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsОт EverandRolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsОценок пока нет
- Design of Foundations for Offshore Wind TurbinesОт EverandDesign of Foundations for Offshore Wind TurbinesРейтинг: 5 из 5 звезд5/5 (3)
- 1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideОт Everand1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideРейтинг: 3.5 из 5 звезд3.5/5 (7)
- Operational Amplifier Circuits: Analysis and DesignОт EverandOperational Amplifier Circuits: Analysis and DesignРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Three Laws of Nature: A Little Book on ThermodynamicsОт EverandThree Laws of Nature: A Little Book on ThermodynamicsРейтинг: 4.5 из 5 звезд4.5/5 (10)