Вам также может понравиться
- Dot Product and PlanesДокумент12 страницDot Product and PlanesDaniel CesareОценок пока нет
- 2-Length, Dot Product, Cross ProductДокумент8 страниц2-Length, Dot Product, Cross ProductslowjamsОценок пока нет
- 9 Multiplication of Vectors: The Scalar or Dot ProductДокумент7 страниц9 Multiplication of Vectors: The Scalar or Dot ProductJaydeepDasОценок пока нет
- Section13 3Документ10 страницSection13 3BirsenŞanlıAkınОценок пока нет
- 3.5 Cross ProductДокумент4 страницы3.5 Cross ProductChloeОценок пока нет
- 10.4 Multiplying Vectors: The Cross ProductДокумент8 страниц10.4 Multiplying Vectors: The Cross ProductnoahОценок пока нет
- Unit 2: Vectors and Dot Product: Math S-21AДокумент6 страницUnit 2: Vectors and Dot Product: Math S-21AKen LimoОценок пока нет
- Orthogonal Projections and Orthonormal BasesДокумент5 страницOrthogonal Projections and Orthonormal BasesMr. Dark BckupОценок пока нет
- Homework ProblemsДокумент2 страницыHomework ProblemsJosh ManОценок пока нет
- Vector Calculus Notes: 1 Vectors in Three DimensionsДокумент15 страницVector Calculus Notes: 1 Vectors in Three DimensionsjhdmssОценок пока нет
- 1 2 P N 1 2 P 1 2 P 1 1 2 2 P P 1 1 1 1 2 2 P P 1: Orthogonal BasisДокумент4 страницы1 2 P N 1 2 P 1 2 P 1 1 2 2 P P 1 1 1 1 2 2 P P 1: Orthogonal BasisAsim JavaidОценок пока нет
- Linear Algebra Chapter 5.1Документ19 страницLinear Algebra Chapter 5.1Francisco Spaulding-AstudilloОценок пока нет
- Week 7: 4.4 Matrix Transformations IIДокумент9 страницWeek 7: 4.4 Matrix Transformations IIDPОценок пока нет
- L9 Vectors in SpaceДокумент4 страницыL9 Vectors in SpaceKhmer ChamОценок пока нет
- Darve Cme100 NotesДокумент131 страницаDarve Cme100 Notesأحمد علي الفاخريОценок пока нет
- 221A Lecture Notes: Notes On Tensor Product 1 What Is "Tensor"?Документ14 страниц221A Lecture Notes: Notes On Tensor Product 1 What Is "Tensor"?Dita PramestiОценок пока нет
- Vectors, Gradient, Divergence and CurlДокумент20 страницVectors, Gradient, Divergence and CurlJuan Robinson100% (1)
- La2 8Документ5 страницLa2 8Roy VeseyОценок пока нет
- Homework ProblemsДокумент3 страницыHomework Problemsss_nainamohammedОценок пока нет
- dg1-3 Surfaces in E 3Документ5 страницdg1-3 Surfaces in E 3publicacc71Оценок пока нет
- Vector Products (3D)Документ13 страницVector Products (3D)Jam Uly GastyОценок пока нет
- Orthogonal Diagonalization of Symmetric Matrices: MATH10212 - Linear Algebra - Brief Lecture NotesДокумент7 страницOrthogonal Diagonalization of Symmetric Matrices: MATH10212 - Linear Algebra - Brief Lecture NotesFiras DiknashОценок пока нет
- Week 10 PDFДокумент8 страницWeek 10 PDFDPОценок пока нет
- Demostración Desigualdad CBSДокумент3 страницыDemostración Desigualdad CBSReysgard RodriguezОценок пока нет
- The Dot ProductДокумент4 страницыThe Dot ProductKate NaybeОценок пока нет
- Vector ProductsДокумент9 страницVector ProductsAZZAZ RACHIDОценок пока нет
- 124F1 - Lecture Notes - Section 1.4Документ6 страниц124F1 - Lecture Notes - Section 1.4Daniel CesareОценок пока нет
- Rudnick NotesДокумент56 страницRudnick NotesAtul KumarОценок пока нет
- Lal7 9Документ3 страницыLal7 9Luise FangОценок пока нет
- MATH 2050 Homework Sheet 2 Fall 2022Документ3 страницыMATH 2050 Homework Sheet 2 Fall 2022SelinaОценок пока нет
- Module I: Electromagnetic Waves: Lecture 3: EM Wave Equation With SourcesДокумент16 страницModule I: Electromagnetic Waves: Lecture 3: EM Wave Equation With SourcesishansbОценок пока нет
- Solution To Quiz 1 - Linear Algebra - Fall Semester 2019: V U V K VK 25 38Документ2 страницыSolution To Quiz 1 - Linear Algebra - Fall Semester 2019: V U V K VK 25 38Juan OsorioОценок пока нет
- Assignment 1: January 27, 2020Документ3 страницыAssignment 1: January 27, 2020Ankush RoyОценок пока нет
- Demengel1989 Article CompactnessTheoremsForSpacesOf PDFДокумент39 страницDemengel1989 Article CompactnessTheoremsForSpacesOf PDFMathSpaceОценок пока нет
- CM Problems 1-1Документ4 страницыCM Problems 1-1Creative ThinkerОценок пока нет
- Binder 3 CДокумент14 страницBinder 3 Csupergravity66Оценок пока нет
- Multivariable Knill 2019 PDFДокумент117 страницMultivariable Knill 2019 PDFjun lideОценок пока нет
- Module I: Electromagnetic Waves: Lecture 8: EM Wave Equation With SourcesДокумент16 страницModule I: Electromagnetic Waves: Lecture 8: EM Wave Equation With SourcesgopalОценок пока нет
- ReportДокумент8 страницReportJunrel J Lasib DabiОценок пока нет
- Unit 2-1 SolutionsДокумент3 страницыUnit 2-1 SolutionsAlina VoОценок пока нет
- Homework 2 SolutionДокумент3 страницыHomework 2 Solutionnoortje.foxОценок пока нет
- 01 Exercises VectorsДокумент3 страницы01 Exercises VectorsaneОценок пока нет
- Lecture 07Документ4 страницыLecture 07Susmita BeheraОценок пока нет
- Mit18 02sc Mnotes Cv3Документ5 страницMit18 02sc Mnotes Cv3Lakshya VijОценок пока нет
- 1 Bilinear MapsДокумент6 страниц1 Bilinear MapsduylambdaОценок пока нет
- A Class of Singularly Perturbed Robin Boundary Value Problems For Semilinear Elliptic EquationДокумент5 страницA Class of Singularly Perturbed Robin Boundary Value Problems For Semilinear Elliptic EquationHam Karim RUPPОценок пока нет
- A Mixed Finite Element Method On A Staggered Mesh For Navier-Stokes EquationsДокумент9 страницA Mixed Finite Element Method On A Staggered Mesh For Navier-Stokes EquationsAnkita SoniОценок пока нет
- 2021 Geometry Study Guide 1Документ10 страниц2021 Geometry Study Guide 1JacmОценок пока нет
- Kautsky1982 1Документ16 страницKautsky1982 1FlorinОценок пока нет
- FEM For 2D With MatlabДокумент33 страницыFEM For 2D With Matlabammar_harbОценок пока нет
- HW 5 Solsla 2Документ5 страницHW 5 Solsla 2Aliya MukhtarovaОценок пока нет
- Bazaraa&goodeДокумент17 страницBazaraa&goodeHuỳnh NguyênОценок пока нет
- Some Mathematical Tools: 1.1 Some Definitions in AlgebraДокумент12 страницSome Mathematical Tools: 1.1 Some Definitions in AlgebraAnonymous C1Sjod6Оценок пока нет
- Gho Rai: 1 Elementary Properties of VectorsДокумент28 страницGho Rai: 1 Elementary Properties of VectorsKanniyappan SrkОценок пока нет
- WKB ApproximationДокумент14 страницWKB Approximationamitsk144Оценок пока нет
- Calc III Quick SheetsДокумент5 страницCalc III Quick Sheetsguardian12Оценок пока нет
- Lecture Slides Linear Algebra 4Документ353 страницыLecture Slides Linear Algebra 4BrunéОценок пока нет
- Classical Mechanics Problems:: U X y X yДокумент4 страницыClassical Mechanics Problems:: U X y X yEvaОценок пока нет
- Take Sheet PDFДокумент1 страницаTake Sheet PDFDaniel CesareОценок пока нет
- ProTools PDFДокумент3 страницыProTools PDFDaniel CesareОценок пока нет
- ProTools PDFДокумент3 страницыProTools PDFDaniel CesareОценок пока нет
- Telemann Viola Concerto Full ScoreДокумент21 страницаTelemann Viola Concerto Full ScoreDaniel Cesare0% (1)
- Chapter 23 Slides-1Документ125 страницChapter 23 Slides-1Daniel CesareОценок пока нет
- Multi VarДокумент17 страницMulti VarDaniel CesareОценок пока нет
- Regents Examination in Algebra 2/trigonometry - January 2015Документ1 страницаRegents Examination in Algebra 2/trigonometry - January 2015Daniel CesareОценок пока нет
- Music Class Day 5Документ11 страницMusic Class Day 5Daniel CesareОценок пока нет
- 124F1 - Lecture Notes - Section 1.4Документ6 страниц124F1 - Lecture Notes - Section 1.4Daniel CesareОценок пока нет
- 124F1 - Lecture Notes - Section 2.1Документ12 страниц124F1 - Lecture Notes - Section 2.1Daniel CesareОценок пока нет
- 1 - Unit 1 Materials - EuroДокумент45 страниц1 - Unit 1 Materials - EuroDaniel CesareОценок пока нет
- AP Euro Review GuideДокумент33 страницыAP Euro Review GuideDaniel CesareОценок пока нет
- Vision For Mobile Robot Navigation - A Survey PDFДокумент31 страницаVision For Mobile Robot Navigation - A Survey PDFtes donlodОценок пока нет
- NHouse SelfBuilder Brochure v2 Jan19 LowresДокумент56 страницNHouse SelfBuilder Brochure v2 Jan19 LowresAndrew Richard ThompsonОценок пока нет
- Em - Animals A To ZДокумент9 страницEm - Animals A To ZgowriОценок пока нет
- Vital Judo Throwing TechniquesДокумент193 страницыVital Judo Throwing TechniquesJuan Jose Opazo Carvajal100% (1)
- Electricity and MagnetismДокумент29 страницElectricity and MagnetismNashrul HaqОценок пока нет
- Electron Withdrawing and Electron Donating GroupsДокумент2 страницыElectron Withdrawing and Electron Donating GroupsOmar Abd ElsalamОценок пока нет
- Institute of Metallurgy and Materials Engineering Faculty of Chemical and Materials Engineering University of The Punjab LahoreДокумент10 страницInstitute of Metallurgy and Materials Engineering Faculty of Chemical and Materials Engineering University of The Punjab LahoreMUmairQrОценок пока нет
- Ar ExportsДокумент1 страницаAr ExportsRais AlamОценок пока нет
- Sample Design Calculations For Block Found. For Vib. Equip.Документ17 страницSample Design Calculations For Block Found. For Vib. Equip.Adam Michael GreenОценок пока нет
- MS 005 For DUCT FABRICATION - INSULATION & INSTALLATION REV-1Документ21 страницаMS 005 For DUCT FABRICATION - INSULATION & INSTALLATION REV-1vusal huseynli100% (2)
- Design and Management of Mettur Dam by Predicting Seepage Losses Using Remote SensingДокумент10 страницDesign and Management of Mettur Dam by Predicting Seepage Losses Using Remote SensingInternational Journal of Application or Innovation in Engineering & ManagementОценок пока нет
- Reflection in SystemsДокумент1 страницаReflection in SystemsGeraldine PadillaОценок пока нет
- BÀI TẬP TA 9 THEO CHUYÊN ĐỀ NGỮ PHÁPДокумент213 страницBÀI TẬP TA 9 THEO CHUYÊN ĐỀ NGỮ PHÁPhoangmaiОценок пока нет
- 2019 BMS1021 Practice Questions Answers PDFДокумент12 страниц2019 BMS1021 Practice Questions Answers PDFaskldhfdasjkОценок пока нет
- PT3 Guided WritingДокумент8 страницPT3 Guided WritingDayang Haffizah Abg AbdillahОценок пока нет
- High Performance Liquid Chromatography: University of Santo Tomas Faculty of Pharmacy Department of BiochemistryДокумент32 страницыHigh Performance Liquid Chromatography: University of Santo Tomas Faculty of Pharmacy Department of BiochemistryMa. Ellah Patricia M. GutierrezОценок пока нет
- Paper 2 Phy 2019-2023Документ466 страницPaper 2 Phy 2019-2023Rocco IbhОценок пока нет
- TSBДокумент3 страницыTSBnoe dela vegaОценок пока нет
- NavaДокумент2 страницыNavasaikiranОценок пока нет
- 8v92ta DetroitДокумент554 страницы8v92ta Detroit10000389% (9)
- Carbon Emissions Don't Cause Global Warming: BackgroundДокумент5 страницCarbon Emissions Don't Cause Global Warming: BackgroundLibertyAustraliaОценок пока нет
- Qualitest Canada BrochureДокумент7 страницQualitest Canada BrochureBala SingamОценок пока нет
- QuestionsДокумент6 страницQuestionsRomeo martinezОценок пока нет
- The Pole and Zeros PDFДокумент24 страницыThe Pole and Zeros PDFKim KeatОценок пока нет
- Servo Controlled FBW With Power Boost Control, Operations & Maint. ManualДокумент126 страницServo Controlled FBW With Power Boost Control, Operations & Maint. ManualKota NatarajanОценок пока нет
- Unit-I: Digital Image Fundamentals & Image TransformsДокумент70 страницUnit-I: Digital Image Fundamentals & Image TransformsNuzhath FathimaОценок пока нет
- Podar International School (Icse) Practice Sheet STD: IX Chapter 28: Distance FormulaДокумент2 страницыPodar International School (Icse) Practice Sheet STD: IX Chapter 28: Distance FormulaVanshika MehrotraОценок пока нет
- Aluminum Alloy 6351 T6 Sheet SuppliersДокумент10 страницAluminum Alloy 6351 T6 Sheet Supplierssanghvi overseas incОценок пока нет
- Responsible Living: Mantri DevelopersДокумент15 страницResponsible Living: Mantri Developersnadaf8Оценок пока нет
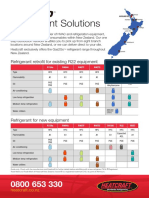
- Refrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentДокумент2 страницыRefrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentpriyoОценок пока нет