Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Kinematics of ParticlesДокумент99 страницKinematics of Particlesrevit37100% (3)
- Samaila Consultant Limited design calculations for single box culvertДокумент8 страницSamaila Consultant Limited design calculations for single box culvertebed_meleck100% (2)
- Lateral Torsional Buckling: Icon LegendДокумент3 страницыLateral Torsional Buckling: Icon LegendAl JameelОценок пока нет
- Re-Evaluation of DNV Simplified Formulae For Crane Tip MotionsДокумент10 страницRe-Evaluation of DNV Simplified Formulae For Crane Tip Motionsguxiaom100% (1)
- Energy ExercisesДокумент29 страницEnergy Exercisesyuxing lieОценок пока нет
- Physics Formula Revision (Conditions Highlighted in RedДокумент2 страницыPhysics Formula Revision (Conditions Highlighted in RedlaraОценок пока нет
- Physics Notes PDFДокумент82 страницыPhysics Notes PDFnatsdorf100% (4)
- Engineering Report Details Infrastructure Works for 31-Lot Residential DevelopmentДокумент25 страницEngineering Report Details Infrastructure Works for 31-Lot Residential DevelopmentAl Jameel100% (1)
- BS 08515-2009: Rainwater Harvesting Systems - Code of PracticeДокумент52 страницыBS 08515-2009: Rainwater Harvesting Systems - Code of PracticeAl JameelОценок пока нет
- BS648-1964 Weights of Building Materials PDFДокумент50 страницBS648-1964 Weights of Building Materials PDFJeff Anderson Collins71% (7)
- The Drift of A Body Floating On WavesДокумент11 страницThe Drift of A Body Floating On WavesvictorОценок пока нет
- FP PNR, Pet, CT 1Документ6 страницFP PNR, Pet, CT 1adityaОценок пока нет
- RCD - Solid Slabs (Part 3) - Continuous One-Way Slab - Worked ExampleДокумент13 страницRCD - Solid Slabs (Part 3) - Continuous One-Way Slab - Worked ExampleAl JameelОценок пока нет
- DP Column-Beam-SlabДокумент1 страницаDP Column-Beam-SlabAl JameelОценок пока нет
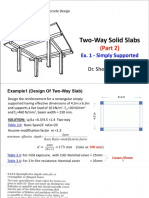
- RCD - Two-Way Solid Slabs (Part 2) - Simply Supported - Worked ExampleДокумент14 страницRCD - Two-Way Solid Slabs (Part 2) - Simply Supported - Worked ExampleAl JameelОценок пока нет
- RCD - Two-Way Solid Slabs (Part 1)Документ22 страницыRCD - Two-Way Solid Slabs (Part 1)Al JameelОценок пока нет
- First floor beam layoutДокумент1 страницаFirst floor beam layoutAl JameelОценок пока нет
- Watershed Analysis: Autocad Civil 3D 2010 Education Curriculum Unit 4: Environmental DesignДокумент7 страницWatershed Analysis: Autocad Civil 3D 2010 Education Curriculum Unit 4: Environmental DesignAl JameelОценок пока нет
- RCD - Beams (Part 3) - Continuous BeamsДокумент21 страницаRCD - Beams (Part 3) - Continuous BeamsAl JameelОценок пока нет
- RCD - Solid Slabs (Part 2) - Simply Supported One-Way Slab - Worked ExampleДокумент13 страницRCD - Solid Slabs (Part 2) - Simply Supported One-Way Slab - Worked ExampleAl JameelОценок пока нет
- RCD - Solid Slabs (Part 1) - One Way Solid SlabДокумент24 страницыRCD - Solid Slabs (Part 1) - One Way Solid SlabAl JameelОценок пока нет
- A Car Free TownДокумент55 страницA Car Free TownAl JameelОценок пока нет
- Citizens Guide LEED-NDДокумент44 страницыCitizens Guide LEED-NDDavid Moya ArancibiaОценок пока нет
- RCD - Beams (Part 2) - Design ExampleДокумент17 страницRCD - Beams (Part 2) - Design ExampleAl JameelОценок пока нет
- Column Design As Per BS 8110-1:1997Документ16 страницColumn Design As Per BS 8110-1:1997Al JameelОценок пока нет
- Design Criteria for FootbridgesДокумент32 страницыDesign Criteria for FootbridgessuprayitnoОценок пока нет
- Dua CoronavirusДокумент11 страницDua CoronavirusOmer MubbasherОценок пока нет
- Project SampleДокумент1 страницаProject SampleAl JameelОценок пока нет
- Nieuwen Huijsen and Khreis 2016 Car-Free CitiesДокумент13 страницNieuwen Huijsen and Khreis 2016 Car-Free CitiesAl JameelОценок пока нет
- Strategies For A Car-Free Oslo - Action Plan For Increased City LifeДокумент5 страницStrategies For A Car-Free Oslo - Action Plan For Increased City LifeAl JameelОценок пока нет
- The Car Free City Model UT11013FU1Документ12 страницThe Car Free City Model UT11013FU1Al JameelОценок пока нет
- Romac Flanged Couplings for Water and Sewer PipesДокумент3 страницыRomac Flanged Couplings for Water and Sewer PipesAl JameelОценок пока нет
- Alpha FCДокумент10 страницAlpha FCAl JameelОценок пока нет
- FC 400Документ1 страницаFC 400Al JameelОценок пока нет
- Repair clamps for water and sewer pipes under 40 charactersДокумент1 страницаRepair clamps for water and sewer pipes under 40 charactersAl JameelОценок пока нет
- Style Cl2: Wider Range .80" W/ Removable LugsДокумент1 страницаStyle Cl2: Wider Range .80" W/ Removable LugsAl JameelОценок пока нет
- Style Cl1: Normal Range .40" W/ Removable LugsДокумент1 страницаStyle Cl1: Normal Range .40" W/ Removable LugsAl JameelОценок пока нет
- (Uav) - Hovercraft Thrust Calculation in A Duct Fan Assembly For HovercraftДокумент14 страниц(Uav) - Hovercraft Thrust Calculation in A Duct Fan Assembly For Hovercraftlyly209Оценок пока нет
- CK-12 Physics Concepts - Motion Graphs & CalculationsДокумент10 страницCK-12 Physics Concepts - Motion Graphs & CalculationsKimberly OlivaresОценок пока нет
- Vectors Mixed Practice 12ıb HДокумент8 страницVectors Mixed Practice 12ıb HNil HamaviogluОценок пока нет
- Associate Professor. Dr. Heba Mahmoud AfifyДокумент53 страницыAssociate Professor. Dr. Heba Mahmoud AfifyAhmed A. EliwaОценок пока нет
- Base Quantities and Derived QuantitiesДокумент31 страницаBase Quantities and Derived Quantitiesdirza82100% (1)
- Course Introduction To Engineering1Документ5 страницCourse Introduction To Engineering1Khanur AysahОценок пока нет
- Lecture 1Документ4 страницыLecture 1maivandien.instОценок пока нет
- Middle Test Physics QuestionsДокумент3 страницыMiddle Test Physics Questions정새리Оценок пока нет
- Edexcel Maths M1 Vectors PhysicsAndMathsTutorДокумент39 страницEdexcel Maths M1 Vectors PhysicsAndMathsTutorDaniel ConwayОценок пока нет
- PHYSICS 1 Lecture For Midterm PDFДокумент27 страницPHYSICS 1 Lecture For Midterm PDFTrisha Mae Fabales CanlasОценок пока нет
- PHYS111 LabManualДокумент90 страницPHYS111 LabManualfarintiranОценок пока нет
- 0702metz PDFДокумент3 страницы0702metz PDFNguyen ThangОценок пока нет
- Manual 191Документ109 страницManual 191Leonardo MuñozОценок пока нет
- Manual Qrod PDFДокумент17 страницManual Qrod PDFEzequiel GuerreroОценок пока нет
- Motion Along A Straight Line Straight Line: Powerpoint Lectures ForДокумент27 страницMotion Along A Straight Line Straight Line: Powerpoint Lectures ForKiervin Paul NietesОценок пока нет
- Hood and Spoon Inertial Flow Belt Conveyor Transfer SystemsДокумент26 страницHood and Spoon Inertial Flow Belt Conveyor Transfer SystemsJaco KotzeОценок пока нет
- Chapter 2 Energy And Momentum Practice TestДокумент11 страницChapter 2 Energy And Momentum Practice TestMohamad SotoudehОценок пока нет
- MotionДокумент4 страницыMotionHnin NandarОценок пока нет
- 081 CH 5Документ5 страниц081 CH 5Andrew James ReadОценок пока нет
- EMG 2014 Mechanics of Machines II July 2014 Class WorkДокумент3 страницыEMG 2014 Mechanics of Machines II July 2014 Class WorkCharles OndiekiОценок пока нет
- Year 9 Forces TestДокумент17 страницYear 9 Forces Testaysha kamar halabiОценок пока нет
- S2 Maths ModelДокумент24 страницыS2 Maths Modeljames alexanderОценок пока нет
- PHYSICS NOTES FOR Forest Guard - WWW - Governmentexams.co - in PDFДокумент150 страницPHYSICS NOTES FOR Forest Guard - WWW - Governmentexams.co - in PDFsanthosh sОценок пока нет