Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Cleanliness Essay 1Документ1 страницаCleanliness Essay 1Kurt BiduaОценок пока нет
- Gas Laws Problem Set (Edited)Документ2 страницыGas Laws Problem Set (Edited)Kurt Bidua0% (1)
- Classification of Philippine Folk Dance: Geograph Y Nature Movement SДокумент10 страницClassification of Philippine Folk Dance: Geograph Y Nature Movement SKurt BiduaОценок пока нет
- Graduation Rate Crisis. Cambridge, MA: Harvard Education PressДокумент3 страницыGraduation Rate Crisis. Cambridge, MA: Harvard Education PressKurt BiduaОценок пока нет
- gc1 - Exercises For Ef and MFДокумент1 страницаgc1 - Exercises For Ef and MFKurt BiduaОценок пока нет
- gc1 - Exercises For Ef and MFДокумент1 страницаgc1 - Exercises For Ef and MFKurt BiduaОценок пока нет
- EnglishДокумент1 страницаEnglishKurt BiduaОценок пока нет
- Research PaperДокумент7 страницResearch PaperKurt BiduaОценок пока нет
- No DownpaymentДокумент1 страницаNo DownpaymentKurt BiduaОценок пока нет
- Gas Laws Problem Set (Edited)Документ2 страницыGas Laws Problem Set (Edited)Kurt Bidua0% (1)
- Group IA Element Group IIA Element Group VIIA ElementДокумент2 страницыGroup IA Element Group IIA Element Group VIIA ElementKurt BiduaОценок пока нет
- Optimized Freeze-Drying Protocols For Human Bone AДокумент11 страницOptimized Freeze-Drying Protocols For Human Bone AKurt BiduaОценок пока нет
- DivergentДокумент3 страницыDivergentKurt BiduaОценок пока нет
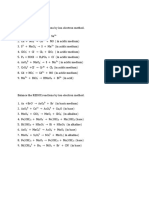
- REDOX EquationsДокумент1 страницаREDOX EquationsKurt BiduaОценок пока нет
- Chemical ReactionsДокумент7 страницChemical ReactionsKurt BiduaОценок пока нет
- Group IA Element Group IIA Element Group VIIA ElementДокумент2 страницыGroup IA Element Group IIA Element Group VIIA ElementKurt BiduaОценок пока нет
- Chapter 7 (REV02)Документ98 страницChapter 7 (REV02)Kurt BiduaОценок пока нет
- Chemical ReactionsДокумент7 страницChemical ReactionsKurt BiduaОценок пока нет
- Freeze Dryer Design Rev0Документ15 страницFreeze Dryer Design Rev0Kurt BiduaОценок пока нет
- Chapter 7 (REV01)Документ30 страницChapter 7 (REV01)Kurt BiduaОценок пока нет
- Chapter 5 (2D) - Energy BalanceДокумент34 страницыChapter 5 (2D) - Energy BalanceKurt BiduaОценок пока нет
- Block Diagram (REV13) PDFДокумент1 страницаBlock Diagram (REV13) PDFKurt BiduaОценок пока нет
- Chapter 2 (2D) p.66Документ51 страницаChapter 2 (2D) p.66Kurt BiduaОценок пока нет
- Theo 3 Midterm OutputsДокумент10 страницTheo 3 Midterm OutputsKurt BiduaОценок пока нет
- Theology 3 - Midterm Output (Expounding The Sacrament of Reconciliation)Документ4 страницыTheology 3 - Midterm Output (Expounding The Sacrament of Reconciliation)Kurt BiduaОценок пока нет
- Velasco's "Table of HopeДокумент2 страницыVelasco's "Table of HopeKurt BiduaОценок пока нет
- Theology 3 - Midterm Output (Expounding The Sacrament of Reconciliation)Документ4 страницыTheology 3 - Midterm Output (Expounding The Sacrament of Reconciliation)Kurt BiduaОценок пока нет
- Student Trainee Training Plan (STTP)Документ1 страницаStudent Trainee Training Plan (STTP)Kurt BiduaОценок пока нет
- Adamson University College of Engineering San Marcelino Street, Ermita, ManilaДокумент27 страницAdamson University College of Engineering San Marcelino Street, Ermita, ManilaKurt BiduaОценок пока нет
- Recommendation Letter - Kurt BiduaДокумент1 страницаRecommendation Letter - Kurt BiduaKurt BiduaОценок пока нет
- MisДокумент17 страницMisKrrish BhardwajОценок пока нет
- Systems Change BookДокумент119 страницSystems Change BookDiego ArzolaОценок пока нет
- Project Analysis Outcome Selection Methodologies TechnologiesДокумент71 страницаProject Analysis Outcome Selection Methodologies TechnologiesSuresh KumarОценок пока нет
- Testing Lecture 15 - Call Graph, Path-Based IntegrationДокумент29 страницTesting Lecture 15 - Call Graph, Path-Based IntegrationahmadОценок пока нет
- Data AnalyticsДокумент4 страницыData AnalyticsGUMARANG CHARYANNОценок пока нет
- Unit - 1-1.software Components, Software Characteristics, Software Crisis, Software Engineering ProcessesДокумент32 страницыUnit - 1-1.software Components, Software Characteristics, Software Crisis, Software Engineering ProcessesShivendra TiwariОценок пока нет
- Conventional Software ManagementДокумент21 страницаConventional Software ManagementSweeti Sah100% (1)
- Performance Dashboard SДокумент76 страницPerformance Dashboard SHasso SchaapОценок пока нет
- Neural - N - Problems - MLPДокумент15 страницNeural - N - Problems - MLPAbdou AbdelaliОценок пока нет
- GE8077 TQM UNIT IV NotesДокумент19 страницGE8077 TQM UNIT IV NotesdineshbabuОценок пока нет
- Quiz Pertemuan 2 - OperasiДокумент9 страницQuiz Pertemuan 2 - OperasiCICI SITI BARKAHОценок пока нет
- STQA University Questions PDFДокумент12 страницSTQA University Questions PDFBhushan mhatreОценок пока нет
- Agile Tester - OverviewДокумент3 страницыAgile Tester - OverviewEdОценок пока нет
- Artificial IntelligenceДокумент20 страницArtificial IntelligenceSuhailОценок пока нет
- Functional Specification SampleДокумент7 страницFunctional Specification SampleLokesh Dora0% (1)
- Software Engineering Short NotesДокумент4 страницыSoftware Engineering Short NotesShan Pathiraja100% (1)
- AI Test Automation Tools Leverage Machine LearningДокумент9 страницAI Test Automation Tools Leverage Machine LearningRajeev ShuklaОценок пока нет
- Re-Thinking Enterprise ArchitectureДокумент10 страницRe-Thinking Enterprise ArchitectureDave BerryОценок пока нет
- Memory and ForgettingДокумент1 страницаMemory and ForgettingJonnyОценок пока нет
- Log Poisonning LFIДокумент12 страницLog Poisonning LFIanargratosОценок пока нет
- Black Board Architecture-ExampleДокумент7 страницBlack Board Architecture-ExampleAnn TangyОценок пока нет
- The Art of Managing Complexity: Presented by Cory R. A. HallamДокумент19 страницThe Art of Managing Complexity: Presented by Cory R. A. HallamAviraj KharadeОценок пока нет
- IT Project Management: Mrs Samreen RazzaqДокумент21 страницаIT Project Management: Mrs Samreen RazzaqAmar GulОценок пока нет
- SQL MonitorДокумент11 страницSQL MonitorrtagarraОценок пока нет
- Deep Learning Hands OnДокумент18 страницDeep Learning Hands OnMohamed AlhadiОценок пока нет
- Lotus Species Classification Using Transfer Learning Based On VGG16, ResNet152V2, and MobileNetV2Документ9 страницLotus Species Classification Using Transfer Learning Based On VGG16, ResNet152V2, and MobileNetV2IAES IJAIОценок пока нет
- GTU Soft Computing Techniques Exam QuestionsДокумент2 страницыGTU Soft Computing Techniques Exam QuestionsHarsh DarjiОценок пока нет
- Cheong Jun Wah - Cbre3103 AssignmentДокумент13 страницCheong Jun Wah - Cbre3103 Assignmentjun gioОценок пока нет
- Maturity ModelsДокумент28 страницMaturity Modelsalakh400Оценок пока нет
- JIUP - Deny ArdiantoДокумент14 страницJIUP - Deny Ardiantom84005254Оценок пока нет