Вам также может понравиться
- ACIO2FIMДокумент15 страницACIO2FIMJoão Paulo Souza DiasОценок пока нет
- Domingos Bernardo - F... P.A.T.Suspens - P.Maquinas 123Документ58 страницDomingos Bernardo - F... P.A.T.Suspens - P.Maquinas 123abacar da rosa godinhoОценок пока нет
- Ensaio Motor CC PDFДокумент35 страницEnsaio Motor CC PDFRogérioPaganiniValentini100% (4)
- Identificação de Parâmetros Do Motor CC PDFДокумент7 страницIdentificação de Parâmetros Do Motor CC PDFHanzo HasashiОценок пока нет
- Dimensionamento de Partida Direta de Motor TrifasicoДокумент20 страницDimensionamento de Partida Direta de Motor TrifasicoJosinaldo Justino100% (1)
- Relatório 5 Erik Chagas RozalДокумент6 страницRelatório 5 Erik Chagas RozalJose AntônioОценок пока нет
- ResumoДокумент10 страницResumoDiogo LandiОценок пока нет
- Artigo ATP EolicaДокумент6 страницArtigo ATP EolicaGuilherme Henrique Bernardes CunhaОценок пока нет
- Bancada de Testes Didática para Análise Dinâmica de Um Sistema de Transmissão Veicular Tipo CVTДокумент12 страницBancada de Testes Didática para Análise Dinâmica de Um Sistema de Transmissão Veicular Tipo CVTFilipe CunhaОценок пока нет
- Motor CC SiemensДокумент9 страницMotor CC Siemensgpamaster-1Оценок пока нет
- Simulado para EletricistasДокумент40 страницSimulado para EletricistasAlyson de Lima PratesОценок пока нет
- Aprendizagem em FocoДокумент41 страницаAprendizagem em Focomacelo barrosОценок пока нет
- 112 - XXIII SNPTEE - Sistema Excitação Na Dinâmica Do Curto Circuito de Geradores (21!05!2015)Документ8 страниц112 - XXIII SNPTEE - Sistema Excitação Na Dinâmica Do Curto Circuito de Geradores (21!05!2015)Jacques DeroualleОценок пока нет
- Determinação Dos Parâmetros de Um Motor de Indução Trifásico SimétricoДокумент7 страницDeterminação Dos Parâmetros de Um Motor de Indução Trifásico SimétricoCesar MaiaОценок пока нет
- Freio EletromagnéticoДокумент4 страницыFreio Eletromagnéticolorentz franklinОценок пока нет
- Acionamentos 2002 5 PDFДокумент35 страницAcionamentos 2002 5 PDFJarbasRezendeОценок пока нет
- Compensador Estático de Reativos Controlado A Tiristores Modelagem e SimulaçãoДокумент6 страницCompensador Estático de Reativos Controlado A Tiristores Modelagem e Simulaçãojulio_souveiaОценок пока нет
- Excitatriz Sem Escovas de Gerador SíncronoДокумент10 страницExcitatriz Sem Escovas de Gerador SíncronoFilipe Simoes OliveiraОценок пока нет
- NBR 11770 - 89 (EB-1961) - Relés de Medição e Sistemas de Proteção - 63pagДокумент63 страницыNBR 11770 - 89 (EB-1961) - Relés de Medição e Sistemas de Proteção - 63pagClaudio LorenzoniОценок пока нет
- 2715 6072 1 SMДокумент19 страниц2715 6072 1 SMJOERDSON TIAGO BATISTA DA SILVAОценок пока нет
- Gabriel Relatorio 1 10Документ10 страницGabriel Relatorio 1 10temp2020Оценок пока нет
- Aula ATPDrawДокумент54 страницыAula ATPDrawJoão Contreiras100% (1)
- NBR 12243 NB 1270 - Calculo de Correntes de Curto-Circuito em Sistemas CA A Bordo de NaviosДокумент18 страницNBR 12243 NB 1270 - Calculo de Correntes de Curto-Circuito em Sistemas CA A Bordo de Naviospsamaral44Оценок пока нет
- Pratica 7Документ4 страницыPratica 7Victor CavalcanteОценок пока нет
- Modelagem Transformadores ATP V1 FBДокумент22 страницыModelagem Transformadores ATP V1 FBWil Liam100% (1)
- NBR 11770 EB 1961 - Reles de Medicao e Sistemas de ProtecaoДокумент63 страницыNBR 11770 EB 1961 - Reles de Medicao e Sistemas de ProtecaolucashckОценок пока нет
- Fundamentos de Máquinas Elétricas - Del Toro PDFДокумент568 страницFundamentos de Máquinas Elétricas - Del Toro PDFAntonio Ricardo100% (1)
- ControleVelocidadeMotorCC 2007Документ47 страницControleVelocidadeMotorCC 2007AlyssonAlmeidaОценок пока нет
- Lote Slides 035602Документ25 страницLote Slides 035602Flodio CunaОценок пока нет
- Aula 5 - Dimensionamento de Condutores ElétricosДокумент21 страницаAula 5 - Dimensionamento de Condutores ElétricosAlexandre O. AlvesОценок пока нет
- Unidade 1: Modelagem e Obtenção de Parâmetros de Um Motor CCДокумент15 страницUnidade 1: Modelagem e Obtenção de Parâmetros de Um Motor CCRodolfo Brigatto FerreiraОценок пока нет
- Relatório Máquina CCДокумент29 страницRelatório Máquina CCAdrian AlanОценок пока нет
- Simulação MIT - MATLABДокумент14 страницSimulação MIT - MATLABMarco Aurélio FrançaОценок пока нет
- Regulacao Da Velocidade de Motores C.AДокумент17 страницRegulacao Da Velocidade de Motores C.ASadraque100% (3)
- Calculos de Curtos-Circuitos em Sistema de DistribuiçãoДокумент15 страницCalculos de Curtos-Circuitos em Sistema de DistribuiçãoIgor PROJОценок пока нет
- Relatório - MOTOR CCДокумент9 страницRelatório - MOTOR CCRafael OliveiraОценок пока нет
- MEle (E) - 2017 - 2018 Nota para Aulas PL9 A 10 - IMRДокумент3 страницыMEle (E) - 2017 - 2018 Nota para Aulas PL9 A 10 - IMRCarlos MeloОценок пока нет
- Modelo Turbina MatlabДокумент8 страницModelo Turbina MatlabJohnantan SantosОценок пока нет
- Cópia Traduzida de F57aДокумент9 страницCópia Traduzida de F57aandre ivoОценок пока нет
- Atividade Pratica I Acionamentos Maio de 2023. (Resp)Документ3 страницыAtividade Pratica I Acionamentos Maio de 2023. (Resp)Alison Rodrigo100% (4)
- Projetos Mecanicos PDFДокумент58 страницProjetos Mecanicos PDFPauloОценок пока нет
- Engenheiro de Sistema Eletrico JuniorДокумент52 страницыEngenheiro de Sistema Eletrico JuniorDiego BandeiraОценок пока нет
- Modelagem Do MITДокумент15 страницModelagem Do MITsalvatteОценок пока нет
- Controle Adaptativo Aplicado Ao Acionamento de Uma Válvula Borboleta Eletrônica AutomotivaДокумент8 страницControle Adaptativo Aplicado Ao Acionamento de Uma Válvula Borboleta Eletrônica Automotivacarlos AntonioОценок пока нет
- Dimensionamento de Eixos de Transmissão de PotênciaДокумент38 страницDimensionamento de Eixos de Transmissão de PotênciaYuri MolgadoОценок пока нет
- Relatório - Soft StarterДокумент15 страницRelatório - Soft StartermaquinatrifasicaОценок пока нет
- Análise de Superação de TC Curto-CircuitoДокумент9 страницAnálise de Superação de TC Curto-CircuitoJamie SmithОценок пока нет
- Vincent Del Toro - Fundamentos de Máquinas Elétricas (1994, LTC) - 1-300!1!50 (01-20)Документ20 страницVincent Del Toro - Fundamentos de Máquinas Elétricas (1994, LTC) - 1-300!1!50 (01-20)Poojan KhuntОценок пока нет
- Motor SincronoДокумент13 страницMotor SincronoFelipe FreireОценок пока нет
- Lista 062023Документ1 страницаLista 062023janaina carvalhoОценок пока нет
- Máquinas Elétricas de C.A. - Avaliação Escrita (Quarto Bimestre)Документ11 страницMáquinas Elétricas de C.A. - Avaliação Escrita (Quarto Bimestre)Athos HospitalarОценок пока нет
- Cap 2 - Dissertacao de Mestrado - Dante ShimodaДокумент30 страницCap 2 - Dissertacao de Mestrado - Dante ShimodaDante ShimodaОценок пока нет
- Reversão de Velocidade - Motor CC ShuntДокумент13 страницReversão de Velocidade - Motor CC ShuntArceu CamposОценок пока нет
- Lumi CenterДокумент8 страницLumi CenterJbprofessor BatistaОценок пока нет
- WEG Multimedidor MMW03 CH Manual Do Usuario 10006647116 PTДокумент36 страницWEG Multimedidor MMW03 CH Manual Do Usuario 10006647116 PTJbprofessor BatistaОценок пока нет
- Qualidade Energia PDFДокумент8 страницQualidade Energia PDFjanluccasОценок пока нет
- EI 02 Eletricidade BásicaДокумент39 страницEI 02 Eletricidade BásicaJbprofessor BatistaОценок пока нет
- EI 03 Corrente ContínuaДокумент9 страницEI 03 Corrente ContínuaJbprofessor BatistaОценок пока нет
- Datasheet Catalogo 01.2022Документ2 страницыDatasheet Catalogo 01.2022Jbprofessor BatistaОценок пока нет
- Exercicios de PropriedadesДокумент1 страницаExercicios de PropriedadesJbprofessor BatistaОценок пока нет
- Exercicios de PropriedadesДокумент3 страницыExercicios de PropriedadesJbprofessor BatistaОценок пока нет
- EI 03 Corrente ContínuaДокумент9 страницEI 03 Corrente ContínuaJbprofessor BatistaОценок пока нет
- Exercicios de PropriedadesДокумент1 страницаExercicios de PropriedadesJbprofessor BatistaОценок пока нет
- Exercicios de ProteçãoДокумент26 страницExercicios de ProteçãoJbprofessor BatistaОценок пока нет
- Exercicios de PropriedadesДокумент1 страницаExercicios de PropriedadesJbprofessor BatistaОценок пока нет
- IC 02 IntroduçãoДокумент24 страницыIC 02 IntroduçãoJbprofessor BatistaОценок пока нет
- IC 05 Hidraulica PDFДокумент42 страницыIC 05 Hidraulica PDFJbprofessor BatistaОценок пока нет
- Ic Célula - de - Carga 05Документ12 страницIc Célula - de - Carga 05IgorFortalОценок пока нет
- IC 03 TerminologiaДокумент22 страницыIC 03 TerminologiaJbprofessor BatistaОценок пока нет
- IC 04 MovimentoДокумент24 страницыIC 04 MovimentoJbprofessor BatistaОценок пока нет
- Sistemas Automacao e ControleДокумент333 страницыSistemas Automacao e ControleTiago VoigtОценок пока нет
- 1 Lista de Exercícios PDFДокумент3 страницы1 Lista de Exercícios PDFJbprofessor BatistaОценок пока нет
- Exercicios de Proteção 02Документ7 страницExercicios de Proteção 02Jbprofessor BatistaОценок пока нет
- IC 03 TerminologiaДокумент22 страницыIC 03 TerminologiaJbprofessor BatistaОценок пока нет
- IC Encorder 04Документ17 страницIC Encorder 04IgorFortalОценок пока нет
- CE Aula 02 TransformadoresДокумент47 страницCE Aula 02 TransformadoresJbprofessor BatistaОценок пока нет
- Apostila SPDA SchneiderДокумент0 страницApostila SPDA SchneiderfuzakaОценок пока нет
- CE Princípio de Eletromagnetismo 01Документ10 страницCE Princípio de Eletromagnetismo 01Roberta CoelhoОценок пока нет
- Eficientizacao MotoresДокумент106 страницEficientizacao MotoresJbprofessor BatistaОценок пока нет
- CE Princípio de Eletromagnetismo 01Документ10 страницCE Princípio de Eletromagnetismo 01Roberta CoelhoОценок пока нет
- NBR 13532 - Elaboração de Projetos de Edificações-ArquiteturaДокумент8 страницNBR 13532 - Elaboração de Projetos de Edificações-ArquiteturaAnna Cristina100% (1)
- Engenharia Econômica Capítulos 1 A 4Документ110 страницEngenharia Econômica Capítulos 1 A 4Marcelo Eduardo Benencase67% (3)
- Manual XTZ PDFДокумент172 страницыManual XTZ PDFBruno CesarОценок пока нет
- Cinetica ExerciciosДокумент2 страницыCinetica ExercicioscarlostucupiОценок пока нет
- Resolucao Conama 490 de 2018 Fase P8 Feiculos PesadosДокумент1 страницаResolucao Conama 490 de 2018 Fase P8 Feiculos PesadosLeonardo SanchesОценок пока нет
- Manual T1500 - Rev.01.1470082490Документ4 страницыManual T1500 - Rev.01.1470082490LucasMaximinoОценок пока нет
- Protocolo de ColetasДокумент1 страницаProtocolo de ColetasalessandraОценок пока нет
- Ácido - ARGALIT NAP 52 - FISPQ 260Документ14 страницÁcido - ARGALIT NAP 52 - FISPQ 260jao.muniz97Оценок пока нет
- O Diodo LaserДокумент12 страницO Diodo LaserpjvvsapoОценок пока нет
- Laudo de Avaliação As 2173-2022-1Документ6 страницLaudo de Avaliação As 2173-2022-1Jordan Pereira PereiraОценок пока нет
- Caixas Cambio Eaton Fso 4405 Aluminio PDFДокумент167 страницCaixas Cambio Eaton Fso 4405 Aluminio PDFtelmy86% (7)
- TRILHADEIRA. WWW - Vencedoramaqtron.com - Br. Manual de InstruçãoДокумент8 страницTRILHADEIRA. WWW - Vencedoramaqtron.com - Br. Manual de InstruçãoGustavo Santos100% (1)
- UMB Informatec - Instalação e ConfiguraçãoДокумент22 страницыUMB Informatec - Instalação e ConfiguraçãoEquipamentosОценок пока нет
- 7º Relatorio de FiscalizacaoДокумент29 страниц7º Relatorio de FiscalizacaoManuel Da Silva Ngunga50% (2)
- FORM-PO-OM-COSE-001-03 - TP FASE A Rev0Документ4 страницыFORM-PO-OM-COSE-001-03 - TP FASE A Rev0fabioОценок пока нет
- Potência em Regime Senoidal PermanenteДокумент39 страницPotência em Regime Senoidal PermanentePedro HenriqueОценок пока нет
- Apostila HIBERNATE PDFДокумент78 страницApostila HIBERNATE PDFrodrigomichel100% (1)
- UABJ Lista Convocacao Chamada RegularДокумент13 страницUABJ Lista Convocacao Chamada RegularMaria Luíza SantosОценок пока нет
- Ufpr2014 Aps Fundamentos Da ArquiteturaДокумент102 страницыUfpr2014 Aps Fundamentos Da ArquiteturaCaiuby Menezes da CostaОценок пока нет
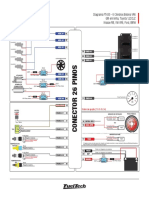
- FT450 - 6 Cil 6 Inj Bob VR6 01Документ1 страницаFT450 - 6 Cil 6 Inj Bob VR6 01William FernandesОценок пока нет
- PROVAДокумент4 страницыPROVASiSi SilvaОценок пока нет
- MODELO - TRABALHO MiguelДокумент4 страницыMODELO - TRABALHO Miguelkarina calado CorreiaОценок пока нет
- ΒΔΞ - Cavalos X CilindradasДокумент2 страницыΒΔΞ - Cavalos X CilindradasNOIVODALAGOAОценок пока нет
- Solda Na Manutenção IIДокумент3 страницыSolda Na Manutenção IIMarx AraujoОценок пока нет
- Manual Torno Nardini AM 325-400-500-650 (Reduzido)Документ135 страницManual Torno Nardini AM 325-400-500-650 (Reduzido)Daniel TavaresОценок пока нет
- Manual Mmo16e1ng e Mmo16e1ng XTДокумент93 страницыManual Mmo16e1ng e Mmo16e1ng XTMarcioОценок пока нет
- 01 Leitura e Interpretação DesenhoДокумент50 страниц01 Leitura e Interpretação DesenhoMoacir SilvaОценок пока нет
- Thales Steven Cerqueira Macario 2018Документ2 страницыThales Steven Cerqueira Macario 2018Zilma MarquesОценок пока нет
- Candidatos Com Inscrição HomologadaДокумент246 страницCandidatos Com Inscrição HomologadaregistroОценок пока нет
- Petrobras 21 Ns Demanda Candidatos Por Vaga Sem Cadastro de ReservaДокумент2 страницыPetrobras 21 Ns Demanda Candidatos Por Vaga Sem Cadastro de ReservaAlexandre ArnoldОценок пока нет