Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- A Novel Compliant Linear-Motion Mechanism Based On Parasitic MOTION COMPESATIONДокумент14 страницA Novel Compliant Linear-Motion Mechanism Based On Parasitic MOTION COMPESATIONalfonsoОценок пока нет
- 2016 Symbiotic Organisms Search For Optimum DesignДокумент15 страниц2016 Symbiotic Organisms Search For Optimum DesignalfonsoОценок пока нет
- 2008 Robustness of Composite Floor Systems With ShearДокумент9 страниц2008 Robustness of Composite Floor Systems With ShearalfonsoОценок пока нет
- Gregory R.D.-classical Mechanics-CUP (2006)Документ18 страницGregory R.D.-classical Mechanics-CUP (2006)alfonsoОценок пока нет
- 2000 Optimum Spacing Design of Grillage Systems Using A Genetic AlgorithmДокумент11 страниц2000 Optimum Spacing Design of Grillage Systems Using A Genetic AlgorithmalfonsoОценок пока нет
- 2010 Artificial Bee Colony Algorithm For Optimization of Truss StructuresДокумент5 страниц2010 Artificial Bee Colony Algorithm For Optimization of Truss StructuresalfonsoОценок пока нет
- Effect of SiO2 Coating On Photoluminescence and Thermal Stability 2008Документ5 страницEffect of SiO2 Coating On Photoluminescence and Thermal Stability 2008alfonsoОценок пока нет
- Non-Linear Analysis of Structural Steel FramesДокумент22 страницыNon-Linear Analysis of Structural Steel FramesalfonsoОценок пока нет
- Analysis of Parasitic Motion in Parallelogram Compliant Mechanism 2010Документ6 страницAnalysis of Parasitic Motion in Parallelogram Compliant Mechanism 2010alfonsoОценок пока нет
- Photocatalytic Abatement of NOx Pollutants in The Air Using Commercial Functional Coating With Porous Morphology 2017Документ20 страницPhotocatalytic Abatement of NOx Pollutants in The Air Using Commercial Functional Coating With Porous Morphology 2017alfonsoОценок пока нет
- RakMek 43 1 2010 3Документ19 страницRakMek 43 1 2010 3Manuel ValenteОценок пока нет
- A Survey of Manufacturing Oriented Topology Optimization MethodsДокумент15 страницA Survey of Manufacturing Oriented Topology Optimization MethodsalfonsoОценок пока нет
- 2017 Tying Capacity of Web Cleat Connections in Fire Part 2Документ12 страниц2017 Tying Capacity of Web Cleat Connections in Fire Part 2alfonsoОценок пока нет
- Functionally Graded Materials 2017Документ118 страницFunctionally Graded Materials 2017alfonsoОценок пока нет
- Solving Multiobjective Optimization ProblemsДокумент38 страницSolving Multiobjective Optimization ProblemsalfonsoОценок пока нет
- Post-Limit Stiffness and Ductility PDFДокумент17 страницPost-Limit Stiffness and Ductility PDFalfonsoОценок пока нет
- Design of Compliant Mechanisms Applications To MEMSДокумент10 страницDesign of Compliant Mechanisms Applications To MEMSalfonsoОценок пока нет
- Leonardo Pinheiroa and Ricardo A. M. Silveira - Computational Procedures For Nonlinear Analysis of Frames With Semi-Rigid ConnectionsДокумент30 страницLeonardo Pinheiroa and Ricardo A. M. Silveira - Computational Procedures For Nonlinear Analysis of Frames With Semi-Rigid ConnectionsCristina VlaicuОценок пока нет
- Analysis of Natural Frequencies of Cantilever Beam Using Ansys 2017 PDFДокумент5 страницAnalysis of Natural Frequencies of Cantilever Beam Using Ansys 2017 PDFalfonsoОценок пока нет
- Solving Multiobjective Optimization ProblemsДокумент38 страницSolving Multiobjective Optimization ProblemsalfonsoОценок пока нет
- 2005 Development of Practical Design Methods For Steel Structures With Semi Rigid Connections PDFДокумент13 страниц2005 Development of Practical Design Methods For Steel Structures With Semi Rigid Connections PDFalfonsoОценок пока нет
- 2004 ELASTO PLASTIC FE ANALYSIS ON MOMENT ROTATION Relations of Top and Seat Angle Connections PDFДокумент10 страниц2004 ELASTO PLASTIC FE ANALYSIS ON MOMENT ROTATION Relations of Top and Seat Angle Connections PDFalfonsoОценок пока нет
- 2001 Nonlinear Analysis of Frames With Flexible Connections PDFДокумент11 страниц2001 Nonlinear Analysis of Frames With Flexible Connections PDFalfonsoОценок пока нет
- Solving Multiobjective Optimization ProblemsДокумент38 страницSolving Multiobjective Optimization ProblemsalfonsoОценок пока нет
- International Journal of Heat and Mass Transfer: Sławomir Dykas, Włodzimierz WróblewskiДокумент9 страницInternational Journal of Heat and Mass Transfer: Sławomir Dykas, Włodzimierz WróblewskialfonsoОценок пока нет
- Accepted Manuscript: Applied Thermal EngineeringДокумент20 страницAccepted Manuscript: Applied Thermal EngineeringalfonsoОценок пока нет
- Structural and Multidisciplinary Optimization Volume 32 Issue 3 2006 (Doi 10.1007/s00158-006-0021-2) S. Kitayama M. Arakawa K. Yamazaki - Penalty Function Approach For The Mixed Discrete NonlineaДокумент12 страницStructural and Multidisciplinary Optimization Volume 32 Issue 3 2006 (Doi 10.1007/s00158-006-0021-2) S. Kitayama M. Arakawa K. Yamazaki - Penalty Function Approach For The Mixed Discrete NonlineaalfonsoОценок пока нет
- Multiobjective Optimization NSGAII 0Документ16 страницMultiobjective Optimization NSGAII 0Carlos Soza RossОценок пока нет
- A Discrete Binary Version of Particle Swarm Algorithm PDFДокумент5 страницA Discrete Binary Version of Particle Swarm Algorithm PDFJuan Sebastián Poveda GulfoОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- CE162P MODULE 2 LECTURE 4 Analysis & Design of Mat FoundationДокумент32 страницыCE162P MODULE 2 LECTURE 4 Analysis & Design of Mat FoundationPROSPEROUS LUCKILYОценок пока нет
- White Paper: 1 Definitive Guide To Data QualityДокумент18 страницWhite Paper: 1 Definitive Guide To Data QualityGonçalo MartinsОценок пока нет
- Regulasi KampenДокумент81 страницаRegulasi KampenIrWaN Dompu100% (2)
- Meta100 AP Brochure WebДокумент15 страницMeta100 AP Brochure WebFirman RamdhaniОценок пока нет
- KIA SONET BookingDocketДокумент7 страницKIA SONET BookingDocketRajesh ThulasiramОценок пока нет
- Plan Lectie Clasa 5 D HaineДокумент5 страницPlan Lectie Clasa 5 D HaineCristina GrapinoiuОценок пока нет
- Eccentric FootingДокумент3 страницыEccentric FootingVarunn VelОценок пока нет
- TTDM - JithinДокумент24 страницыTTDM - JithinAditya jainОценок пока нет
- Engineering Ethics in Practice ShorterДокумент79 страницEngineering Ethics in Practice ShorterPrashanta NaikОценок пока нет
- D E S C R I P T I O N: Acknowledgement Receipt For EquipmentДокумент2 страницыD E S C R I P T I O N: Acknowledgement Receipt For EquipmentTindusNiobetoОценок пока нет
- Template Budget ProposalДокумент4 страницыTemplate Budget ProposalimamОценок пока нет
- Waste Biorefinery Models Towards Sustainable Circular Bioeconomy Critical Review and Future Perspectives2016bioresource Technology PDFДокумент11 страницWaste Biorefinery Models Towards Sustainable Circular Bioeconomy Critical Review and Future Perspectives2016bioresource Technology PDFdatinov100% (1)
- VOTOL EMController Manual V2.0Документ18 страницVOTOL EMController Manual V2.0Nandi F. ReyhanОценок пока нет
- Determinant of Nurses' Response Time in Emergency Department When Taking Care of A PatientДокумент9 страницDeterminant of Nurses' Response Time in Emergency Department When Taking Care of A PatientRuly AryaОценок пока нет
- CIPD L5 EML LOL Wk3 v1.1Документ19 страницCIPD L5 EML LOL Wk3 v1.1JulianОценок пока нет
- National Interest Waiver Software EngineerДокумент15 страницNational Interest Waiver Software EngineerFaha JavedОценок пока нет
- Misc 8DNL 8MPL 8MPN B PDFДокумент41 страницаMisc 8DNL 8MPL 8MPN B PDFVesica PiscesОценок пока нет
- Aristotle - OCR - AS Revision NotesДокумент3 страницыAristotle - OCR - AS Revision NotesAmelia Dovelle0% (1)
- LG LFX31945 Refrigerator Service Manual MFL62188076 - Signature2 Brand DID PDFДокумент95 страницLG LFX31945 Refrigerator Service Manual MFL62188076 - Signature2 Brand DID PDFplasmapete71% (7)
- SDS ERSA Rev 0Документ156 страницSDS ERSA Rev 0EdgarVelosoCastroОценок пока нет
- Types of Chemical Reactions: Synthesis and DecompositionДокумент3 страницыTypes of Chemical Reactions: Synthesis and DecompositionAlan MartínОценок пока нет
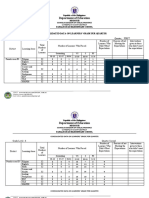
- Department of Education: Consolidated Data On Learners' Grade Per QuarterДокумент4 страницыDepartment of Education: Consolidated Data On Learners' Grade Per QuarterUsagi HamadaОценок пока нет
- Uniform Motion WorksheetДокумент8 страницUniform Motion Worksheetnikhil patro100% (1)
- FT2020Документ7 страницFT2020Sam SparksОценок пока нет
- 28 TerminalsДокумент42 страницы28 TerminalsAlin FazacasОценок пока нет
- 1994 Manual de Taller Bronco, Econoline, F-Series PDFДокумент208 страниц1994 Manual de Taller Bronco, Econoline, F-Series PDFOscar Cruz100% (1)
- TIA Guidelines SingaporeДокумент24 страницыTIA Guidelines SingaporeTahmidSaanidОценок пока нет
- Intelligent Status Monitoring System For Port Machinery: RMGC/RTGCДокумент2 страницыIntelligent Status Monitoring System For Port Machinery: RMGC/RTGCfatsahОценок пока нет
- Community Profile and Baseline DataДокумент7 страницCommunity Profile and Baseline DataEJ RaveloОценок пока нет
- RH-A Catalog PDFДокумент1 страницаRH-A Catalog PDFAchmad KОценок пока нет