Вам также может понравиться
- Manual Predict 1Документ97 страницManual Predict 1David KlinkenbergОценок пока нет
- Clasificación de Los Yacimientos Mediante Diagramas de Fase (Autoguardado)Документ20 страницClasificación de Los Yacimientos Mediante Diagramas de Fase (Autoguardado)Mario Enrique Vadillo SáenzОценок пока нет
- Reg Pozo S Intro Ducci OnДокумент99 страницReg Pozo S Intro Ducci OnDanitza Pamela QuisbertОценок пока нет
- Pruebas de Pozos-1er Capítulo Marzo 2018Документ148 страницPruebas de Pozos-1er Capítulo Marzo 2018Cristopher OrtizОценок пока нет
- Procesado de Datos Sísmicos PDFДокумент125 страницProcesado de Datos Sísmicos PDFgus_tavo161Оценок пока нет
- Etapas de simulación de yacimientosДокумент45 страницEtapas de simulación de yacimientosjoreli100% (1)
- Modelo GeologicoДокумент15 страницModelo GeologicoDaniel SanchezОценок пока нет
- Simulación Numérica de Yacimientos FracturadosДокумент5 страницSimulación Numérica de Yacimientos FracturadosChristian CG100% (1)
- Portafolio Comportamiento de YacimientosДокумент20 страницPortafolio Comportamiento de YacimientosDiana Herrera SolisОценок пока нет
- 02 Curvas de Declinacion I2019Документ60 страниц02 Curvas de Declinacion I2019Ricardo HernandezОценок пока нет
- II.2 y II.3 Campos Proritarios - Reporte Trimestral CNHДокумент21 страницаII.2 y II.3 Campos Proritarios - Reporte Trimestral CNHPedro Mentado100% (2)
- Congreso Mundial de Crudos PesadosДокумент8 страницCongreso Mundial de Crudos PesadosJose OsornoОценок пока нет
- Cap01 Conceptos Básicos de Petrofísica y RegistrosДокумент82 страницыCap01 Conceptos Básicos de Petrofísica y RegistrosJulieth Julio MurciaОценок пока нет
- Escuela Superior Politécnica Del Litoral: Tesis de GradoДокумент243 страницыEscuela Superior Politécnica Del Litoral: Tesis de GradoZitro0991Оценок пока нет
- Tesis PDFДокумент137 страницTesis PDFMarlon HerreraОценок пока нет
- Curso de MudloggingДокумент76 страницCurso de MudloggingNestor Cucuna CalizayaОценок пока нет
- Flujo de Fluidos en El Medio PorosoДокумент131 страницаFlujo de Fluidos en El Medio PorosojosmellcОценок пока нет
- Análisis de Conductividad de FracturasДокумент28 страницAnálisis de Conductividad de FracturasJinhichi Molero RodriguezОценок пока нет
- Newsleter Ingenieria de Yacimientos EneroДокумент12 страницNewsleter Ingenieria de Yacimientos EneroLorenzo Antonio Cordova100% (1)
- Registros de PozosДокумент11 страницRegistros de PozosZurisadai GallegosОценок пока нет
- Geoestadística: Análisis espacial de fenómenosДокумент118 страницGeoestadística: Análisis espacial de fenómenosCesar Avalos100% (1)
- Geomecánica de pozos: propiedades mecánicas de la rocaДокумент144 страницыGeomecánica de pozos: propiedades mecánicas de la rocaLuis ValensiОценок пока нет
- Presentación Procedimiento Asentamiento TR'sДокумент23 страницыPresentación Procedimiento Asentamiento TR'sPequeño GuerreroОценок пока нет
- CARACTERIZACION DE YACIMIENTOS, CrucigramaДокумент6 страницCARACTERIZACION DE YACIMIENTOS, Crucigramalorena hernandez aguilarОценок пока нет
- Tipos de NFRДокумент17 страницTipos de NFRAdriana Garcia CortezОценок пока нет
- Analisis PVTДокумент27 страницAnalisis PVTYamilet Nataly Maire100% (1)
- Ejercicios KriggingДокумент3 страницыEjercicios KriggingCristobal L. SantibañezОценок пока нет
- Well Heads Import PetrelДокумент23 страницыWell Heads Import PetrelGeolisОценок пока нет
- Analisis de NucleosДокумент6 страницAnalisis de NucleosJorge Saire100% (1)
- Presentación de Prototipos (Unidos)Документ50 страницPresentación de Prototipos (Unidos)Hernandez Reyes Hugo AlbertoОценок пока нет
- Manejo de Proyectos de Terminación de Pozos MarinosДокумент22 страницыManejo de Proyectos de Terminación de Pozos MarinosJavierОценок пока нет
- Determinación de Gastos Críticos de Producción para Minimizar La Conificación de Agua en Yacimientos PetrolerosДокумент102 страницыDeterminación de Gastos Críticos de Producción para Minimizar La Conificación de Agua en Yacimientos PetrolerosRZRОценок пока нет
- Caracterizacion DinamicaДокумент17 страницCaracterizacion DinamicaMartin Martinez RamirezОценок пока нет
- Atlas Geologico No Convencionales V3Документ73 страницыAtlas Geologico No Convencionales V3Alejandro Garza JuárezОценок пока нет
- Aplicación de Petrel en la caracterización de YNFДокумент6 страницAplicación de Petrel en la caracterización de YNFJorgee DzulОценок пока нет
- Simulacion Numerica de YacimientosДокумент10 страницSimulacion Numerica de YacimientosPedro Wilmar Guerrero MahechaОценок пока нет
- Terminación DST de Un Pozo Exploratorio en Aguas ProfundasДокумент83 страницыTerminación DST de Un Pozo Exploratorio en Aguas ProfundasAlejandroMendozaОценок пока нет
- Predicción Del Comportamiento de Un Yacimiento Con SegregaciónДокумент10 страницPredicción Del Comportamiento de Un Yacimiento Con SegregaciónJair RosasОценок пока нет
- Nucleos PerforacionДокумент16 страницNucleos PerforacionIvan Kock100% (1)
- Luzbel Napoleon SДокумент78 страницLuzbel Napoleon Sdaniel_calzada1Оценок пока нет
- PROGRAMA CANTARELL 1019 Ok PDFДокумент136 страницPROGRAMA CANTARELL 1019 Ok PDFMarco Antonio Tovar BarrancoОценок пока нет
- Cálculo de reservas y productividad de petróleo y gas en yacimientos del PerúДокумент45 страницCálculo de reservas y productividad de petróleo y gas en yacimientos del PerúYeison Bracho100% (1)
- Declinación de Los Yacimientos ShaleДокумент116 страницDeclinación de Los Yacimientos ShaleTlacaelel2018Оценок пока нет
- Trabajo Especial de GradoДокумент166 страницTrabajo Especial de GradoRoberto FuentesОценок пока нет
- Skua Gocad Spanish SimuladoresДокумент8 страницSkua Gocad Spanish SimuladoresVeronica Efigenia Cruz WongОценок пока нет
- Curso de Analisis Computarizado de Pruebas de Presiones, PDFДокумент170 страницCurso de Analisis Computarizado de Pruebas de Presiones, PDFJean RangelОценок пока нет
- Registros de ProduccionДокумент105 страницRegistros de ProduccionSandy LázgarОценок пока нет
- Temas 1234 PDFДокумент108 страницTemas 1234 PDFCintia Mamani LlanqueОценок пока нет
- EstadisticaDescriptivaEnsayo JonathanRubioДокумент14 страницEstadisticaDescriptivaEnsayo JonathanRubioJonathan MauricioОценок пока нет
- Informe - Ariana Polanco IДокумент25 страницInforme - Ariana Polanco Iariana polancoОценок пока нет
- Datos Agrupados y No AgrupadosДокумент5 страницDatos Agrupados y No AgrupadosIvan HuertaОценок пока нет
- Memoria EscandonДокумент12 страницMemoria EscandonJuan Carlos Escandón CastilloОценок пока нет
- Taller #4Документ9 страницTaller #4kiara blandonОценок пока нет
- Conceptos de Estadistica DescriptivaДокумент13 страницConceptos de Estadistica DescriptivaGustavo BarrientosОценок пока нет
- Unidad 3 Estadistica DescriptivaДокумент9 страницUnidad 3 Estadistica DescriptivaCarloss Ruiz R100% (1)
- Investigacion UNIDAD 1Документ9 страницInvestigacion UNIDAD 1Arleth Lopez AntonioОценок пока нет
- Elementos de estadística para ingeniería: Un curso básicoОт EverandElementos de estadística para ingeniería: Un curso básicoОценок пока нет
- Estadística para veterinarios y zootecnistasОт EverandEstadística para veterinarios y zootecnistasРейтинг: 5 из 5 звезд5/5 (1)
- Manual Para La Construcción De Tablas De Contingencia: Modelo, Investigación Y AnálisisОт EverandManual Para La Construcción De Tablas De Contingencia: Modelo, Investigación Y AnálisisОценок пока нет
- Herramienta de Producción PLT y Pruebas de PresiónДокумент5 страницHerramienta de Producción PLT y Pruebas de PresiónJulio MartínezОценок пока нет
- Requisitos para el diseño de una plataforma petroleraДокумент58 страницRequisitos para el diseño de una plataforma petroleraJulio Martínez83% (6)
- Guia Yacimientos ArenoarcillososДокумент1 страницаGuia Yacimientos ArenoarcillososJulio MartínezОценок пока нет
- Herramienta de Producción PLT y Pruebas de PresiónДокумент5 страницHerramienta de Producción PLT y Pruebas de PresiónJulio MartínezОценок пока нет
- Edafología: estudio del sueloДокумент6 страницEdafología: estudio del sueloJulio MartínezОценок пока нет
- Wellbore StorageДокумент24 страницыWellbore StorageJulio MartínezОценок пока нет
- Comision Mundial Del Medio AmbienteДокумент26 страницComision Mundial Del Medio AmbienteJulio Martínez100% (1)
- Conducta HumanaДокумент1 страницаConducta HumanaJulio Martínez67% (3)
- La Ética en La IngenieriaДокумент30 страницLa Ética en La IngenieriaJulio MartínezОценок пока нет
- Motivación PersonalДокумент2 страницыMotivación PersonalJulio MartínezОценок пока нет
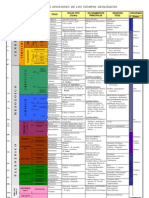
- Tabla de Los Tiempos GeológicosДокумент1 страницаTabla de Los Tiempos GeológicosHardy Angel Sahuanay JulcaОценок пока нет
- Fuerzas Que Inducen A La Aceptación de Las NormasДокумент9 страницFuerzas Que Inducen A La Aceptación de Las NormasJulio MartínezОценок пока нет
- CNDHДокумент13 страницCNDHJulio MartínezОценок пока нет
- Formación de la Sierra Madre Occidental (SMOДокумент18 страницFormación de la Sierra Madre Occidental (SMOJulio MartínezОценок пока нет
- CartografíaДокумент22 страницыCartografíaJulio MartínezОценок пока нет
- Fuerzas Que Inducen A La Aceptación de Las NormasДокумент9 страницFuerzas Que Inducen A La Aceptación de Las NormasJulio MartínezОценок пока нет
- Conducta HumanaДокумент1 страницаConducta HumanaJulio Martínez67% (3)
- 21 Leyes Irrefutables Del LiderazgoДокумент23 страницы21 Leyes Irrefutables Del LiderazgoJulio MartínezОценок пока нет
- Filo 1Документ160 страницFilo 1arrОценок пока нет
- Lección 3 Proyecto de Investigación JurídicaДокумент6 страницLección 3 Proyecto de Investigación JurídicaBrigitt Sujey Aguirre TorresОценок пока нет
- Investigación científica en la Universidad Nacional Hermilio ValdizánДокумент9 страницInvestigación científica en la Universidad Nacional Hermilio ValdizánWilmer León SandovalОценок пока нет
- Semana 02 Guia Practica 02 TareaДокумент3 страницыSemana 02 Guia Practica 02 TareaANGIE LESLIE MESCUA MALLMAОценок пока нет
- R - CU 387 2021 UAC Reglamento EpgДокумент3 страницыR - CU 387 2021 UAC Reglamento EpgSebastian Pedraza RamirezОценок пока нет
- Metodo CuantitativoДокумент9 страницMetodo CuantitativoJohan MorenoОценок пока нет
- Control de Lectura 3 de La Economía General A La Economía Financiera Un Comentario INNOVARДокумент4 страницыControl de Lectura 3 de La Economía General A La Economía Financiera Un Comentario INNOVARGuzmán Alvarado Axel MiguelОценок пока нет
- Lógica - 03 Métodos de DemostraciónДокумент103 страницыLógica - 03 Métodos de Demostraciónoscar javier vega alvarengaОценок пока нет
- Ramón Torras. Escuela Española de CantoДокумент193 страницыRamón Torras. Escuela Española de CantoNatalia SindeОценок пока нет
- Estadisticas II Tarea VIIIДокумент4 страницыEstadisticas II Tarea VIIIOmar Sibriàn100% (1)
- MetodologíaДокумент30 страницMetodologíaAlessandroMaximoffОценок пока нет
- Estrategia comunicación trabajo comunitario La EstrellaДокумент86 страницEstrategia comunicación trabajo comunitario La EstrellaLuis Alberto Jordan Pilco100% (1)
- Estadistica Con StataДокумент37 страницEstadistica Con StataOsvaldo NinaОценок пока нет
- Esquema TIFДокумент10 страницEsquema TIFjamilezapatacarlierОценок пока нет
- Informe de Lectura Taylor y DavilaДокумент5 страницInforme de Lectura Taylor y DavilaNatalia CanoОценок пока нет
- Practica de Topografia 2Документ21 страницаPractica de Topografia 2IsabellaBortolinОценок пока нет
- Fase 2 Maira Rodelo Grupo 95Документ21 страницаFase 2 Maira Rodelo Grupo 95facturas casanareОценок пока нет
- Principios básicos de criminalísticaДокумент4 страницыPrincipios básicos de criminalísticaDenisse RamirezОценок пока нет
- MetodologíaДокумент6 страницMetodologíaEDUARD SERRANOОценок пока нет
- Abbagnano y Visalberghi-Cap XVII y XVIII - Historia de La PedagogíaДокумент37 страницAbbagnano y Visalberghi-Cap XVII y XVIII - Historia de La Pedagogíapaulobarsena100% (1)
- Fundamentos de la cienciaДокумент14 страницFundamentos de la cienciaChloe NoahОценок пока нет
- CASO PRÁCTICO 3 - Estadística InferencialДокумент7 страницCASO PRÁCTICO 3 - Estadística InferencialYomi OcampoОценок пока нет
- Cuadro Comparativo Metodos de Investigacion CientificaДокумент2 страницыCuadro Comparativo Metodos de Investigacion CientificaLESLY JHANELA CRUZ ROMOОценок пока нет
- Caso Parcial ..Документ1 страницаCaso Parcial ..Lionel WuОценок пока нет
- Curso Popular de Economía Política - A. BogdanovДокумент98 страницCurso Popular de Economía Política - A. BogdanovAntonio David San Agustín LópezОценок пока нет
- Medición e incertidumbre en el laboratorio: instrumentos, errores y cálculosДокумент11 страницMedición e incertidumbre en el laboratorio: instrumentos, errores y cálculosCristhian Eduardo Canario FerrelОценок пока нет
- Tarea 2 Filosofia GeneralДокумент6 страницTarea 2 Filosofia GeneralMadeley Moris HenríquezОценок пока нет
- Tarea Virtual 1 EnsayoДокумент8 страницTarea Virtual 1 EnsayoJuan Tuni100% (1)
- Unidad 2 ProbabilidadesДокумент38 страницUnidad 2 ProbabilidadesJorge AlarjaОценок пока нет
- OBLIGATORIEDAD DE FISCALIZACIÓN DEL JURADO NACIONAL DE ELECCIONES EN LOS PROCESOS ELECTORALES INTERNOS EN LAS ORGANIZACIONES POLÍTICASДокумент43 страницыOBLIGATORIEDAD DE FISCALIZACIÓN DEL JURADO NACIONAL DE ELECCIONES EN LOS PROCESOS ELECTORALES INTERNOS EN LAS ORGANIZACIONES POLÍTICASLuis Antonio Andre CondorОценок пока нет