Вам также может понравиться
- Long-Short Term Echo State Network For Time Series PredictionДокумент15 страницLong-Short Term Echo State Network For Time Series PredictionFernando Nicolas Ureta GodoyОценок пока нет
- Applied Catalysis B: EnvironmentalДокумент9 страницApplied Catalysis B: EnvironmentalFernando Nicolas Ureta GodoyОценок пока нет
- Survey of Multifidelity Methods in Uncertainty Propagation, Inference, and OptimizationДокумент42 страницыSurvey of Multifidelity Methods in Uncertainty Propagation, Inference, and OptimizationFernando Nicolas Ureta GodoyОценок пока нет
- Principles and Applications of Mathematical and Physical Modelling of Metallurgical ProcessesДокумент29 страницPrinciples and Applications of Mathematical and Physical Modelling of Metallurgical ProcessesFernando Nicolas Ureta GodoyОценок пока нет
- 1 s2.0 S1474667016356658 MainДокумент6 страниц1 s2.0 S1474667016356658 MainFernando Nicolas Ureta GodoyОценок пока нет
- Some Properties of Continuous-Time Autoregressive Moving Average Time Series ModelsДокумент44 страницыSome Properties of Continuous-Time Autoregressive Moving Average Time Series ModelsFernando Nicolas Ureta GodoyОценок пока нет
- Application of Supervised Machine Learning As A Method For Identifying DEM Contact Law ParametersДокумент16 страницApplication of Supervised Machine Learning As A Method For Identifying DEM Contact Law ParametersFernando Nicolas Ureta GodoyОценок пока нет
- Energy Storage in Paraffin: A PDE Backstepping ExperimentДокумент13 страницEnergy Storage in Paraffin: A PDE Backstepping ExperimentFernando Nicolas Ureta GodoyОценок пока нет
- Optimizing With GaДокумент27 страницOptimizing With GaFernando Nicolas Ureta GodoyОценок пока нет
- Getting Started with LaTeX GuideДокумент19 страницGetting Started with LaTeX Guideabhiraj1234Оценок пока нет
- An End-Member Algorithm For Deciphering PDFДокумент13 страницAn End-Member Algorithm For Deciphering PDFFernando Nicolas Ureta GodoyОценок пока нет
- Class Slides PCДокумент16 страницClass Slides PCFernando Nicolas Ureta GodoyОценок пока нет
- Getting Started with LaTeX GuideДокумент19 страницGetting Started with LaTeX Guideabhiraj1234Оценок пока нет
- Optimizing With GaДокумент62 страницыOptimizing With GaNatanael Acencio RijoОценок пока нет
- Demo Day Region EsДокумент42 страницыDemo Day Region EsFernando Nicolas Ureta GodoyОценок пока нет
- Tools of Titans The Tactics Routines and Habits of Billionaires Icons and World Class Performers PDFДокумент527 страницTools of Titans The Tactics Routines and Habits of Billionaires Icons and World Class Performers PDFFernando Nicolas Ureta GodoyОценок пока нет
- Numerical Solutions of Non-Linear EquationsДокумент35 страницNumerical Solutions of Non-Linear EquationsJatinder KumarОценок пока нет
- Sequential ModularДокумент32 страницыSequential ModularniteeshasinghОценок пока нет
- Random Forests Brei Man MC Learning JДокумент28 страницRandom Forests Brei Man MC Learning JNidhi DubeyОценок пока нет
- Minerals Engineering: J.W.D. Groenewald, C. AldrichДокумент11 страницMinerals Engineering: J.W.D. Groenewald, C. AldrichFernando Nicolas Ureta GodoyОценок пока нет
- Carbonate Equilibria in Natural WatersДокумент26 страницCarbonate Equilibria in Natural WatersNacorn PanchanawapornОценок пока нет
- Quaternary Science ReviewsДокумент19 страницQuaternary Science ReviewsFernando Nicolas Ureta GodoyОценок пока нет
- CurryДокумент11 страницCurryFernando Nicolas Ureta GodoyОценок пока нет
- Continental Temperatures Over Past 2,000 YearsДокумент11 страницContinental Temperatures Over Past 2,000 YearsFernando Nicolas Ureta GodoyОценок пока нет
- Material Control de Lectura 4Документ8 страницMaterial Control de Lectura 4Fernando Andrés TapiaОценок пока нет
- Hojjat HosseinzadehДокумент9 страницHojjat HosseinzadehFernando Nicolas Ureta GodoyОценок пока нет
- Comparison of HPGR Ball Mill and HPGR Stirred Mill Circuits To The Existing Ag Sag Mill Ball Mill CircuitsДокумент180 страницComparison of HPGR Ball Mill and HPGR Stirred Mill Circuits To The Existing Ag Sag Mill Ball Mill CircuitsNataniel LinaresОценок пока нет
- Sequential Modular and Simultaneous Modular StrategiesДокумент13 страницSequential Modular and Simultaneous Modular Strategieskim haksongОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- NCERT Solutions For Class 8 Maths Chapter 14 - FactorizationДокумент25 страницNCERT Solutions For Class 8 Maths Chapter 14 - FactorizationSATAMANYU BHOLОценок пока нет
- Bombers and SeagullsДокумент8 страницBombers and SeagullshpgeraldОценок пока нет
- Custom Objects, Fields, Tabs, Related Lists, List ViewsДокумент7 страницCustom Objects, Fields, Tabs, Related Lists, List ViewsAjay GhugeОценок пока нет
- Electrochemical Cleaningof Artificially Tarnished SilverДокумент11 страницElectrochemical Cleaningof Artificially Tarnished SilverRahmi Nur Anisah Nasution 2003114489Оценок пока нет
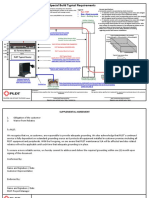
- Special Build Typical Requirements (Rev1) PDFДокумент2 страницыSpecial Build Typical Requirements (Rev1) PDFToper CdjОценок пока нет
- Dcee 27a Lect 1Документ39 страницDcee 27a Lect 1Geraldine TimpocОценок пока нет
- Surface Roughness Conversion Chart Tables - Engineers EdgeДокумент10 страницSurface Roughness Conversion Chart Tables - Engineers Edgejames.anitОценок пока нет
- Effect of Restraint, Volume Change, and Reinforcement On Cracking of Mass ConcreteДокумент26 страницEffect of Restraint, Volume Change, and Reinforcement On Cracking of Mass ConcreteDIDIER ANGEL LOPEZ RINCONОценок пока нет
- Pavan Kumar 1Документ8 страницPavan Kumar 1Anji ChОценок пока нет
- MSCS) (V4.12.10) MSC Server Hardware DescriptionДокумент148 страницMSCS) (V4.12.10) MSC Server Hardware DescriptionDeepak JoshiОценок пока нет
- Introduction To Music Theory: Inversions of ChordsДокумент3 страницыIntroduction To Music Theory: Inversions of Chordsnaveenmanuel8879Оценок пока нет
- AAL1 and Segmentation and Reassembly LayerДокумент18 страницAAL1 and Segmentation and Reassembly Layeroureducation.inОценок пока нет
- MinePlan Release NotesДокумент14 страницMinePlan Release NotesJuanJo RoblesОценок пока нет
- Graph Theory 6Документ30 страницGraph Theory 6Zeeshan AhmedОценок пока нет
- Document: NO.:: Ultrasonic ExaminationДокумент41 страницаDocument: NO.:: Ultrasonic ExaminationDamar WardhanaОценок пока нет
- VT2009B Eng 02 953680Документ2 страницыVT2009B Eng 02 953680gabrieltracto100% (1)
- Laminar Flow Reactor ProblemДокумент6 страницLaminar Flow Reactor ProblemAileen Banua Añonuevo100% (1)
- Tensile FinalДокумент43 страницыTensile Finalnamrataavyas75% (4)
- Basic Chemistry Review (Students)Документ16 страницBasic Chemistry Review (Students)AnilovRozovaОценок пока нет
- EL Bay-O-Net Current-Limiting Fuse Assembly - CA132039ENДокумент4 страницыEL Bay-O-Net Current-Limiting Fuse Assembly - CA132039ENfederico4thОценок пока нет
- Erection Manual Hydro-1Документ63 страницыErection Manual Hydro-1rajfab100% (1)
- Explorer - Help RESCOДокумент18 страницExplorer - Help RESCOTomás Oteros OrdóñezОценок пока нет
- IT407 Knowledge EngineeringДокумент2 страницыIT407 Knowledge EngineeringVidya AОценок пока нет
- RPGS Complete Lecture Note1 Inpdf Compressed1Документ203 страницыRPGS Complete Lecture Note1 Inpdf Compressed1Purusottam PandeyОценок пока нет
- Datasheet PDFДокумент16 страницDatasheet PDFSergio Daniel BarretoОценок пока нет
- Areas Related To CircleДокумент32 страницыAreas Related To CircleGiorno GiovannaОценок пока нет
- Ldp-105m150 Moso Test ReportДокумент17 страницLdp-105m150 Moso Test ReportzecyberОценок пока нет
- NeurophysiologyДокумент364 страницыNeurophysiologyTaimoor Ul HassanОценок пока нет
- Mech Vi Non Traditional Machining (10me665) NotesДокумент45 страницMech Vi Non Traditional Machining (10me665) Notesnikhil0% (1)
- Glass Transition Temperature: IntroductionДокумент7 страницGlass Transition Temperature: IntroductionBarkha RaniОценок пока нет