Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Design and Analysis of Underground Circular & Rectangular Water Tank and Intze Water TankДокумент5 страницDesign and Analysis of Underground Circular & Rectangular Water Tank and Intze Water TankGRD JournalsОценок пока нет
- Image Based Virtual Try On NetworkДокумент4 страницыImage Based Virtual Try On NetworkGRD JournalsОценок пока нет
- GRDJEV06I060005Документ7 страницGRDJEV06I060005GRD JournalsОценок пока нет
- Optimization of Xanthan Gum Fermentation Utilizing Food WasteДокумент11 страницOptimization of Xanthan Gum Fermentation Utilizing Food WasteGRD JournalsОценок пока нет
- Chronic Kidney Disease Stage Prediction in HIV Infected Patient Using Deep LearningДокумент8 страницChronic Kidney Disease Stage Prediction in HIV Infected Patient Using Deep LearningGRD JournalsОценок пока нет
- Automatic Face Recognition Attendance System Using Python and OpenCvДокумент7 страницAutomatic Face Recognition Attendance System Using Python and OpenCvGRD Journals100% (1)
- Evaluate The Performance of MongoDB NoSQL Database Using PythonДокумент5 страницEvaluate The Performance of MongoDB NoSQL Database Using PythonGRD JournalsОценок пока нет
- Simulation and Prediction of LULC Change Detection Using Markov Chain and Geo-Spatial Analysis, A Case Study in Ningxia North ChinaДокумент13 страницSimulation and Prediction of LULC Change Detection Using Markov Chain and Geo-Spatial Analysis, A Case Study in Ningxia North ChinaGRD JournalsОценок пока нет
- Grdjev06i010003 PDFДокумент4 страницыGrdjev06i010003 PDFGRD JournalsОценок пока нет
- Design and Simulation of LNA Using Advanced Design Systems (ADS)Документ6 страницDesign and Simulation of LNA Using Advanced Design Systems (ADS)GRD JournalsОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Brady Lecture 6Документ32 страницыBrady Lecture 6TygerGoose0% (1)
- Cidtt The GuideДокумент268 страницCidtt The GuideAbdul Shameem100% (1)
- Syllabus 330C SystemsДокумент1 страницаSyllabus 330C SystemsDANIEL VARGAS RODRIGUEZОценок пока нет
- Remote SensingДокумент30 страницRemote SensingAdeel AhmedОценок пока нет
- Toshiba Multi Split and Single Split Systems BrochureДокумент32 страницыToshiba Multi Split and Single Split Systems Brochurethanhlong2005Оценок пока нет
- 11kv BB1Документ1 страница11kv BB1Hammadiqbal12Оценок пока нет
- Free Convection (Formulae & Problems)Документ15 страницFree Convection (Formulae & Problems)ananth2012Оценок пока нет
- DominosДокумент11 страницDominosApril MartinezОценок пока нет
- Norma para Tuercas Hexagonales y Cuadradas (Inch Series) ASME-ANSI B18.2.2-1987Документ42 страницыNorma para Tuercas Hexagonales y Cuadradas (Inch Series) ASME-ANSI B18.2.2-1987Jorge Roman SantosОценок пока нет
- MPT Health and Safety GuidelinesДокумент9 страницMPT Health and Safety GuidelinesJohn PajeОценок пока нет
- Iso 10211 Heat2 Heat3Документ16 страницIso 10211 Heat2 Heat3nsk377416100% (1)
- Ao-90265ba Pci CardДокумент46 страницAo-90265ba Pci CardFrancisco Javier PérezОценок пока нет
- InternshipДокумент14 страницInternshipMohammed Shaheeruddin0% (1)
- Alexandria University Faculty of Engineering: Electromechanical Engineering Sheet 1 (Synchronous Machine)Документ5 страницAlexandria University Faculty of Engineering: Electromechanical Engineering Sheet 1 (Synchronous Machine)Mahmoud EltawabОценок пока нет
- مثال تطبيقي في النمذجة والمحاكاة باستخدام CSIMДокумент11 страницمثال تطبيقي في النمذجة والمحاكاة باستخدام CSIMأكبر مكتبة كتب عربيةОценок пока нет
- The Beginner's Guide To SynthsДокумент11 страницThe Beginner's Guide To SynthsAnda75% (4)
- The Impact of Internet Use For StudentsДокумент8 страницThe Impact of Internet Use For StudentsCharlesОценок пока нет
- Ade 364 Ade366 Workshop Manual Abby PDFДокумент297 страницAde 364 Ade366 Workshop Manual Abby PDFJesu Jese68% (34)
- Xerox Corporation - TonerДокумент2 страницыXerox Corporation - Tonerjaredf@jfelectric.com100% (3)
- Falcon 7X CommunicationsДокумент105 страницFalcon 7X Communicationsjunmech-1Оценок пока нет
- Last - kmsg-2016-11-17 10 29 34Документ588 страницLast - kmsg-2016-11-17 10 29 34Anonymous HpW3UcqОценок пока нет
- Characteristics of Supercritical Flow in Rectangular ChannelДокумент10 страницCharacteristics of Supercritical Flow in Rectangular ChannelFatihОценок пока нет
- Harga Jual Genset Deutz GermanyДокумент2 страницыHarga Jual Genset Deutz GermanyAgung SetiawanОценок пока нет
- Weg CFW500 Enc PDFДокумент32 страницыWeg CFW500 Enc PDFFabio Pedroso de Morais100% (1)
- Inv INDIGO 22.11.2021 + TRДокумент1 страницаInv INDIGO 22.11.2021 + TRJunis MamedovОценок пока нет
- Yaskawa TM.J7.01Документ96 страницYaskawa TM.J7.01Salvador CrisantosОценок пока нет
- Forensics Plastics and Burn TestsДокумент2 страницыForensics Plastics and Burn TestsTrishaОценок пока нет
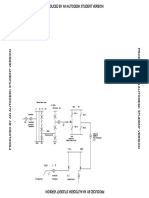
- Congelador - Frigidaire GLFC1326FW1 - Man - Eng - PartsДокумент7 страницCongelador - Frigidaire GLFC1326FW1 - Man - Eng - Partsfelix bazanОценок пока нет
- High Performance HTP eДокумент14 страницHigh Performance HTP ejohnny_cashedОценок пока нет
- Relationship Between Organisations and Information SystemsДокумент16 страницRelationship Between Organisations and Information SystemsJoan KuriaОценок пока нет