Вам также может понравиться
- Solar Powered LED Street Light With Auto - Intensity ControlДокумент16 страницSolar Powered LED Street Light With Auto - Intensity Controljigar16789Оценок пока нет
- Mini Project ReportДокумент9 страницMini Project ReportShiekh LafeezОценок пока нет
- Design and Implementation of Smart Solar LEDДокумент4 страницыDesign and Implementation of Smart Solar LEDArif Arkarnis100% (3)
- Sample Street Light Report 2 PDFДокумент58 страницSample Street Light Report 2 PDFApoorva v Hejjaji100% (1)
- Automatic Street Light ControllerДокумент16 страницAutomatic Street Light ControllerAsif Newaz Khan100% (2)
- 5-Automatic Street LightДокумент47 страниц5-Automatic Street LightSanthosh Kumar NeelamОценок пока нет
- Smart Street Lighting System Based On Sensors Using PLC and ScadaДокумент7 страницSmart Street Lighting System Based On Sensors Using PLC and ScadaIAEME PublicationОценок пока нет
- Autometic Street Light ControllerДокумент31 страницаAutometic Street Light ControllerAman Kumar SinghОценок пока нет
- Project Ideas ECE StudentsДокумент51 страницаProject Ideas ECE StudentsVatsal N ShahОценок пока нет
- Smart Vehicle Headlight Automation With Efficient Energy Management SystemДокумент32 страницыSmart Vehicle Headlight Automation With Efficient Energy Management SystemPRASHANTH KUMAR S100% (1)
- Automatic Street Light ControlДокумент9 страницAutomatic Street Light ControlMuhammad AwaisОценок пока нет
- Smart Street Light Project ReportДокумент24 страницыSmart Street Light Project ReportPavan S 4UB18EC024Оценок пока нет
- Cape Coast Technical University Project Work Design of Solar Street Light System From University of Cape Coast West Gate To ElminaДокумент29 страницCape Coast Technical University Project Work Design of Solar Street Light System From University of Cape Coast West Gate To ElminaJames TorkonooОценок пока нет
- Automatic Street Light Control Using LDRДокумент14 страницAutomatic Street Light Control Using LDRpubg mobileОценок пока нет
- Automatic Street Light Control Using LDRДокумент3 страницыAutomatic Street Light Control Using LDRDGPROJECTS100% (1)
- Microcontroller Based Solar Charger: A Project Report OnДокумент51 страницаMicrocontroller Based Solar Charger: A Project Report Oniwantinthatve67% (3)
- Automatic Street Light Controller Using Ic 555 TimerДокумент9 страницAutomatic Street Light Controller Using Ic 555 Timerkaarthik KОценок пока нет
- A Design of Single Axis Sun Tracking SystemДокумент4 страницыA Design of Single Axis Sun Tracking SystemMazhar UddeenОценок пока нет
- Automatic Street Light ControlДокумент41 страницаAutomatic Street Light ControlP.r. Suvankar67% (3)
- Automatic Street Light Controller Using LDR and RelayДокумент44 страницыAutomatic Street Light Controller Using LDR and RelayIorhee saviour100% (1)
- Automatic Road Safety Reflector Lightning System: Department of Electrical and Electronics EngineeringДокумент2 страницыAutomatic Road Safety Reflector Lightning System: Department of Electrical and Electronics EngineeringSrujan ReddyОценок пока нет
- Design and Simulation of PV Water Pumping SystemДокумент104 страницыDesign and Simulation of PV Water Pumping Systemshanmugam.s100% (7)
- Mini Project Report FinalДокумент24 страницыMini Project Report FinalPrathamesh Parit100% (1)
- Automatic Street Light Using Solar and Piezoelectric SensorДокумент4 страницыAutomatic Street Light Using Solar and Piezoelectric SensorIJRASETPublicationsОценок пока нет
- Solar Tracking SystemДокумент3 страницыSolar Tracking SystemsahiiiiОценок пока нет
- Automatic Night Lamp With Morning AlarmДокумент4 страницыAutomatic Night Lamp With Morning AlarmijaertОценок пока нет
- Design and Implementation of A G P Photovoltaic Maximum Power Point TrackerДокумент55 страницDesign and Implementation of A G P Photovoltaic Maximum Power Point TrackerBilal KanjОценок пока нет
- Zigbee Based Smart Street Lighting SystemДокумент3 страницыZigbee Based Smart Street Lighting SystemseventhsensegroupОценок пока нет
- Automatic Street Light Control PDFДокумент9 страницAutomatic Street Light Control PDFmannie edet0% (1)
- Solar Powered Led Street Light-1Документ25 страницSolar Powered Led Street Light-1kiswah computersОценок пока нет
- Laser Security System: Bachelor of Techonology IN Electronics and Communication EngineeringДокумент17 страницLaser Security System: Bachelor of Techonology IN Electronics and Communication Engineering4H9. Aaleem skОценок пока нет
- OAG - LED Replacement September Executive Summary 2014 FinalДокумент4 страницыOAG - LED Replacement September Executive Summary 2014 Finaldean robertsОценок пока нет
- SynopsisДокумент5 страницSynopsisyrikki100% (1)
- Chapter - 1 1.1 OverviewДокумент21 страницаChapter - 1 1.1 OverviewTirumalarao PechettyОценок пока нет
- Automatic Bathroom Light PDFДокумент1 страницаAutomatic Bathroom Light PDFJan Ahmed0% (1)
- Low-Cost Automatic Headlight Dimmer System - 24 PagesДокумент24 страницыLow-Cost Automatic Headlight Dimmer System - 24 Pagesjulakanti1Оценок пока нет
- Solar Battery ChargerДокумент32 страницыSolar Battery Chargerapi-298102482Оценок пока нет
- Traffic Light SystemДокумент25 страницTraffic Light SystemiykedigitalОценок пока нет
- Solar Tracking SystemДокумент31 страницаSolar Tracking SystemShivam Mishra100% (1)
- Auto Intensity Control of Street LightsДокумент7 страницAuto Intensity Control of Street LightsKoushik MaityОценок пока нет
- LED Street LightingДокумент36 страницLED Street LightingenochsandysandyОценок пока нет
- Solar Powered Battery Charging With Reverse Current ProtectionДокумент3 страницыSolar Powered Battery Charging With Reverse Current ProtectionPallav DuttaОценок пока нет
- Street Light Monitoring and Controlling SystemДокумент8 страницStreet Light Monitoring and Controlling SystemSATRIOОценок пока нет
- Report On Solar PV TechnologiesДокумент16 страницReport On Solar PV Technologiessagar paneliyaОценок пока нет
- S124-Solar Based Mobile Charger For Rural AreasДокумент4 страницыS124-Solar Based Mobile Charger For Rural AreasYellaturi Siva Kishore ReddyОценок пока нет
- MPPT Using Sepic ConverterДокумент109 страницMPPT Using Sepic ConverterSandhya RevuriОценок пока нет
- Design and Implementation of A Solar Power SystemДокумент6 страницDesign and Implementation of A Solar Power SystemEditor IJTSRDОценок пока нет
- Automatic Street Light Control SystemДокумент10 страницAutomatic Street Light Control SystemMahathir AhmadОценок пока нет
- Intelligent Street-Light System Using Arduino UNOДокумент2 страницыIntelligent Street-Light System Using Arduino UNOSherry Sher0% (1)
- Smart Street Light For Energy ConservationДокумент5 страницSmart Street Light For Energy ConservationkhalidОценок пока нет
- Solar Energy Projects ListДокумент8 страницSolar Energy Projects ListSanjana Singh100% (1)
- Smart Street Lighting SystemДокумент4 страницыSmart Street Lighting SystemVeronica George0% (2)
- Design of Solar Led Street Lamp Automatic Control Circuit Literature ReviewДокумент24 страницыDesign of Solar Led Street Lamp Automatic Control Circuit Literature Reviewsouvikdolui75% (4)
- 50.solar Tracking System For Optimal Power GenerationДокумент4 страницы50.solar Tracking System For Optimal Power GenerationRavi Teja Varma KunaparajuОценок пока нет
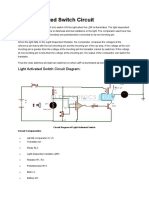
- Light Activated Switch Circuit DiagramДокумент2 страницыLight Activated Switch Circuit DiagramNoor FazillaОценок пока нет
- Solar Street Lights-1Документ23 страницыSolar Street Lights-1Nutan PrasadОценок пока нет
- Solar Powered Auto Night Lamp: Name: Rajesh Bagli Reg No: D192007462Документ18 страницSolar Powered Auto Night Lamp: Name: Rajesh Bagli Reg No: D192007462EIJE100% (1)
- Project IGIДокумент106 страницProject IGIPawan Wagh PatilОценок пока нет
- Smart Street LightДокумент18 страницSmart Street LightANSHUMAN KUMAR (ÃV)Оценок пока нет
- 8051 InstructionsДокумент24 страницы8051 InstructionsMurali VannappanОценок пока нет
- HASBE: A Hierarchical Attribute-Based Solution For Flexible and Scalable Access Control in Cloud ComputingДокумент4 страницыHASBE: A Hierarchical Attribute-Based Solution For Flexible and Scalable Access Control in Cloud ComputingMurali VannappanОценок пока нет
- Service Quality and Consumer SatisfactionДокумент46 страницService Quality and Consumer SatisfactionMurali VannappanОценок пока нет
- A Study On Rewards and Compensation of Employee With Special ReferenceДокумент21 страницаA Study On Rewards and Compensation of Employee With Special ReferenceMurali Vannappan100% (1)
- Final-Advance Breaking System For Hill Drive VehiclesДокумент59 страницFinal-Advance Breaking System For Hill Drive VehiclesMurali VannappanОценок пока нет
- TemplateДокумент1 страницаTemplateMurali VannappanОценок пока нет
- Student Management System Project ReportДокумент59 страницStudent Management System Project ReportMurali Vannappan60% (30)
- Teaching Physics Using Robotics SynopsisДокумент12 страницTeaching Physics Using Robotics SynopsisMurali VannappanОценок пока нет
- TermsДокумент1 страницаTermsMurali VannappanОценок пока нет
- Square Hole Drilling MachineДокумент3 страницыSquare Hole Drilling MachineMurali VannappanОценок пока нет
- Automatic Double Axis Pneumatic JCB Sensor Based Inspection ConveyorДокумент2 страницыAutomatic Double Axis Pneumatic JCB Sensor Based Inspection ConveyorMurali VannappanОценок пока нет
- Home Security and Monitoring SystemДокумент2 страницыHome Security and Monitoring SystemMurali VannappanОценок пока нет
- Fuelless Heat EnergyДокумент22 страницыFuelless Heat EnergyMurali VannappanОценок пока нет
- Automation of Drilling Process Using Electro-Pneumatic SystemДокумент5 страницAutomation of Drilling Process Using Electro-Pneumatic SystemMurali VannappanОценок пока нет
- Generator Failure Investigation PDFДокумент25 страницGenerator Failure Investigation PDFvenkatws1Оценок пока нет
- Samsung 2016 Sales Catalog PDFДокумент8 страницSamsung 2016 Sales Catalog PDFDeddi KhrisnaОценок пока нет
- How To Do Catalogue in Whatsapp - Google SearchДокумент1 страницаHow To Do Catalogue in Whatsapp - Google SearchAzwina OthmanОценок пока нет
- World02 08 15Документ33 страницыWorld02 08 15The WorldОценок пока нет
- Prescolite Recessed Lighting Catalog RS-1 1966Документ36 страницPrescolite Recessed Lighting Catalog RS-1 1966Alan MastersОценок пока нет
- Chapter 5:light 2003: 1. The Diagram Shows A Student Looking at A Plane MirrorДокумент17 страницChapter 5:light 2003: 1. The Diagram Shows A Student Looking at A Plane MirrorBernard GohОценок пока нет
- Lithography Sequence: Lithography Process Requirements The PhotoresistДокумент3 страницыLithography Sequence: Lithography Process Requirements The PhotoresiststansilawОценок пока нет
- Borax Mineral Activity PDFДокумент3 страницыBorax Mineral Activity PDFFranco Vega LovatonОценок пока нет
- The New Yorker February 12 2018 PDFДокумент110 страницThe New Yorker February 12 2018 PDFMelissa100% (3)
- Aromatherapy - 600 Aromatherapy Recipes For Beauty, Health & Home - Plus Advice & Tips On How To Use Essential Oils - Nodrm PDFДокумент365 страницAromatherapy - 600 Aromatherapy Recipes For Beauty, Health & Home - Plus Advice & Tips On How To Use Essential Oils - Nodrm PDFFernanda Rodriguez75% (4)
- RHS Exam OutlineДокумент10 страницRHS Exam Outlinefree booksОценок пока нет
- Odyssey Marine Exploration, Inc. v. The Unidentified Shipwrecked Vessel - Document No. 88Документ7 страницOdyssey Marine Exploration, Inc. v. The Unidentified Shipwrecked Vessel - Document No. 88Justia.comОценок пока нет
- Bush - As We May Think (Life Magazine 9-10-1945)Документ8 страницBush - As We May Think (Life Magazine 9-10-1945)Abraham LepeОценок пока нет
- Astronomy - Buying The Best Telescope - Sky & Telescope 1997Документ7 страницAstronomy - Buying The Best Telescope - Sky & Telescope 1997오상진Оценок пока нет
- O'Donnell Family Tree PhotosДокумент47 страницO'Donnell Family Tree PhotosJimОценок пока нет
- Lubitel 2Документ7 страницLubitel 2Mihai AndreiОценок пока нет
- Working Platform Powerpoint Presentation January2008.PpsДокумент22 страницыWorking Platform Powerpoint Presentation January2008.PpsshingkeongОценок пока нет
- Tugasan 2: SFU3023 General Physics IiДокумент4 страницыTugasan 2: SFU3023 General Physics IiShahidan SidekОценок пока нет
- APX HF3 User's Manual PDFДокумент30 страницAPX HF3 User's Manual PDFAlexander Grau100% (1)
- Evelyn Be MineДокумент330 страницEvelyn Be MinePrincess Fujoshi100% (4)
- Sony DSC-W100 Service ManualДокумент69 страницSony DSC-W100 Service ManualBrent SmithОценок пока нет
- Voicecourse StrobosДокумент35 страницVoicecourse StrobospocepocОценок пока нет
- Book of Lost Spells (Necromancer Games)Документ137 страницBook of Lost Spells (Necromancer Games)Rodrigo Hky91% (22)
- Angel-Attica-Hesperia 1945 PDFДокумент105 страницAngel-Attica-Hesperia 1945 PDFStella Katsarou100% (1)
- Sinopsis 3 IdiotДокумент2 страницыSinopsis 3 IdiotReza KurniawanОценок пока нет
- AS Level Film Studies-Production Planning: A Location ReportДокумент5 страницAS Level Film Studies-Production Planning: A Location ReportkautsarAchouchenОценок пока нет
- ToolsShortcuts PDFДокумент1 страницаToolsShortcuts PDFlucasОценок пока нет
- Russia, June 2014Документ21 страницаRussia, June 2014Josh JonesОценок пока нет
- Zone One by Colson WhiteheadДокумент31 страницаZone One by Colson WhiteheadRandomHouseAU43% (7)
- ADANI Medical MAMMOSCAN Leaflet A3 Eng 020916Документ2 страницыADANI Medical MAMMOSCAN Leaflet A3 Eng 020916eduardoОценок пока нет