Вам также может понравиться
- Winding NumberДокумент3 страницыWinding NumberRahul MisriОценок пока нет
- Definition of Curvature As Per Different Sources: 1) Wikipedia: Link:-Curvature of Space CurveДокумент2 страницыDefinition of Curvature As Per Different Sources: 1) Wikipedia: Link:-Curvature of Space CurveKarim ShahbazОценок пока нет
- Radius of Curvature of Cartesian ND Polar CurvesДокумент14 страницRadius of Curvature of Cartesian ND Polar Curveskaran338100% (2)
- Curl (Mathematics) - WikipediaДокумент14 страницCurl (Mathematics) - WikipediaAns RazaОценок пока нет
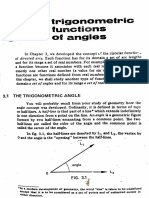
- Trig No Metric FunctionДокумент24 страницыTrig No Metric FunctionShishpal SinghОценок пока нет
- Fungsi Trigon 2Документ7 страницFungsi Trigon 2Muh HidayatullahОценок пока нет
- MECH 211 - Moments of InertiaДокумент56 страницMECH 211 - Moments of InertiaJohn David AbarquezОценок пока нет
- Chapter 02 - TorsionДокумент35 страницChapter 02 - Torsionsengthai100% (1)
- Torsion TensorДокумент7 страницTorsion Tensorletter_ashish4444Оценок пока нет
- Introduction To Mathematics of General RelativityДокумент10 страницIntroduction To Mathematics of General Relativityimanarrovi100% (2)
- Chapter 02 - Torsion and ExceriseДокумент59 страницChapter 02 - Torsion and ExcerisesengthaiОценок пока нет
- Trigonometric Functions Topic SummaryДокумент13 страницTrigonometric Functions Topic SummaryPerson GainableОценок пока нет
- Radius of GyrationДокумент15 страницRadius of GyrationShahid AyoubОценок пока нет
- 三角函数定理Документ21 страница三角函数定理Jonathan HookОценок пока нет
- Rotation Matrix - WikipediaДокумент23 страницыRotation Matrix - WikipediaEfessosОценок пока нет
- Axis-Angle RepresentationДокумент6 страницAxis-Angle RepresentationSAN JUAN BAUTISTAОценок пока нет
- Rectilinear Kinematics: Erratic MotionДокумент14 страницRectilinear Kinematics: Erratic MotionMohammad UmarОценок пока нет
- Rotation MatrixДокумент22 страницыRotation MatrixchessgeneralОценок пока нет
- Ch02 2Документ35 страницCh02 2이재봉Оценок пока нет
- PDF Radius of Curvature CompressДокумент7 страницPDF Radius of Curvature CompressSollutions for techОценок пока нет
- Curl (Mathematics) - Wikipedia, The Free EncyclopediaДокумент10 страницCurl (Mathematics) - Wikipedia, The Free EncyclopediabmxengineeringОценок пока нет
- Trigonometric Functions - Wikipedia, The Free EncyclopediaДокумент18 страницTrigonometric Functions - Wikipedia, The Free Encyclopediadaniyalhassan2789Оценок пока нет
- EvoluteДокумент5 страницEvoluteKrishanu ModakОценок пока нет
- Som 200323142910Документ9 страницSom 200323142910Asante MandioperaОценок пока нет
- Lecture 13, 14 - Chapter 6 Area Moments of InertiaДокумент31 страницаLecture 13, 14 - Chapter 6 Area Moments of Inertiarobel metikuОценок пока нет
- Week 3: Differential Geometry of CurvesДокумент9 страницWeek 3: Differential Geometry of CurvesTeresa Villena GonzálezОценок пока нет
- Curves in SpaceДокумент9 страницCurves in SpaceTeresa Villena GonzálezОценок пока нет
- Riemann Curvature TensorДокумент6 страницRiemann Curvature TensorjosgauОценок пока нет
- 1.1 Objective: Lab Session - 1Документ18 страниц1.1 Objective: Lab Session - 1fawad naeemОценок пока нет
- Robotics Kinematics and DynamicsДокумент6 страницRobotics Kinematics and Dynamicsfadyah yulitaОценок пока нет
- Radius of CurvatureДокумент7 страницRadius of CurvatureYash LokhareОценок пока нет
- Definitions of Those Functions, But One Can Define Them Equally WellДокумент4 страницыDefinitions of Those Functions, But One Can Define Them Equally WellkabebangОценок пока нет
- Points and Planes in 3DДокумент30 страницPoints and Planes in 3DAbsarОценок пока нет
- Trigonometric Functions 2Документ34 страницыTrigonometric Functions 2Sahil JindalОценок пока нет
- List of Trigonometric IdentitiesДокумент16 страницList of Trigonometric IdentitiesArnab NandiОценок пока нет
- Lab Session 3Документ7 страницLab Session 3m.sheraz malikОценок пока нет
- Flight Direction Cosine MatrixДокумент11 страницFlight Direction Cosine MatrixsazradОценок пока нет
- List of Trigonometric Identities - wikiPEDIAДокумент26 страницList of Trigonometric Identities - wikiPEDIAAmiya Ranjan MalikОценок пока нет
- Trigonometric Functions - WikipediaДокумент14 страницTrigonometric Functions - WikipediaAlone EulerОценок пока нет
- Differential Calculus: Differentiation. Geometrically, The Derivative at A Point Is TheДокумент10 страницDifferential Calculus: Differentiation. Geometrically, The Derivative at A Point Is TheNirmal BhowmickОценок пока нет
- Plane Trigonometry: Trigonometry Angle Unit ConversionДокумент5 страницPlane Trigonometry: Trigonometry Angle Unit ConversionZairah Ann BorjaОценок пока нет
- List of Trigonometric Identities: Wiki Loves Monuments: Photograph A Monument, Help Wikipedia and Win!Документ43 страницыList of Trigonometric Identities: Wiki Loves Monuments: Photograph A Monument, Help Wikipedia and Win!rajeshkumar0243Оценок пока нет
- Vectors and Dirac Delta FunctionДокумент39 страницVectors and Dirac Delta FunctionSubrata RakshitОценок пока нет
- 1706 07878Документ19 страниц1706 07878Ch ZainОценок пока нет
- Chapter 5 TransformationsДокумент7 страницChapter 5 Transformationsdenis kipkiruiОценок пока нет
- Robotics and Automation ME-465 Lec 3: Dr. Sara AliДокумент58 страницRobotics and Automation ME-465 Lec 3: Dr. Sara Alimuhammad usamaОценок пока нет
- Lab Session 2 MomДокумент7 страницLab Session 2 Momm.sheraz malikОценок пока нет
- App IIIcha 4Документ69 страницApp IIIcha 4Sena MekoninОценок пока нет
- Module 1: A Crash Course in Vectors Lecture 2: Coordinate SystemsДокумент10 страницModule 1: A Crash Course in Vectors Lecture 2: Coordinate SystemsPraveen KumarОценок пока нет
- Rigid Foldable Structure From Space Curve Tachi IASS2011Документ8 страницRigid Foldable Structure From Space Curve Tachi IASS2011alan garcia reyesОценок пока нет
- Experiment # 1 PDFДокумент15 страницExperiment # 1 PDFMuhammad ALI NoorОценок пока нет
- Schoolisfun's Math Level 2 Subject Test Guide and FormulasДокумент40 страницSchoolisfun's Math Level 2 Subject Test Guide and Formulassudhakaralla1100% (2)
- Kinamatics of Rotational Motion Alipit and ArandidДокумент37 страницKinamatics of Rotational Motion Alipit and ArandidJudith BagasinОценок пока нет
- Parametric DerivativeДокумент2 страницыParametric DerivativegraxaakoОценок пока нет
- Computer Graphics Imp QuesДокумент23 страницыComputer Graphics Imp QuesDr. MANU SINGH KEC (CSE)Оценок пока нет
- Chapter III Torsion 3.1 3.2Документ7 страницChapter III Torsion 3.1 3.2Joshua John Julio100% (1)
- Multilinear Functions Of Direction And Their Uses In Differential GeometryОт EverandMultilinear Functions Of Direction And Their Uses In Differential GeometryОценок пока нет
- Orthographic Projection: Exploring Orthographic Projection in Computer VisionОт EverandOrthographic Projection: Exploring Orthographic Projection in Computer VisionОценок пока нет
- Jump To Navigationjump To Search: This Article Is About Biological Eggs. For Eggs As Food, See - For Other Uses, SeeДокумент5 страницJump To Navigationjump To Search: This Article Is About Biological Eggs. For Eggs As Food, See - For Other Uses, SeeewbОценок пока нет
- Cooking: Jump To Navigationjump To SearchДокумент10 страницCooking: Jump To Navigationjump To SearchewbОценок пока нет
- Cars (Film) : Jump To Navigationjump To SearchДокумент23 страницыCars (Film) : Jump To Navigationjump To SearchewbОценок пока нет
- Places: Bridge Can Also Refer ToДокумент2 страницыPlaces: Bridge Can Also Refer ToewbОценок пока нет
- Deck (Bridge) : Structural AnalysisДокумент2 страницыDeck (Bridge) : Structural AnalysisewbОценок пока нет
- History and Development: Instrumentation Is A Collective Term ForДокумент5 страницHistory and Development: Instrumentation Is A Collective Term ForewbОценок пока нет
- MK-Composite Bridge System: Description of MethodДокумент2 страницыMK-Composite Bridge System: Description of MethodewbОценок пока нет
- Geology: For The Scientific Journal, SeeДокумент5 страницGeology: For The Scientific Journal, SeeewbОценок пока нет
- Euler-Bernoulli Beam TheoryДокумент6 страницEuler-Bernoulli Beam TheoryewbОценок пока нет
- Aquifers: Groundwater Is TheДокумент3 страницыAquifers: Groundwater Is TheewbОценок пока нет
- Seismic WaveДокумент9 страницSeismic WaveewbОценок пока нет
- Requesting A Translation From A Foreign Language To EnglishДокумент3 страницыRequesting A Translation From A Foreign Language To EnglishewbОценок пока нет
- For Other Uses, See .: Pier (Disambiguation)Документ11 страницFor Other Uses, See .: Pier (Disambiguation)ewbОценок пока нет
- Machine: This Article Is About Devices That Perform Tasks. For Other Uses, See - Further InformationДокумент4 страницыMachine: This Article Is About Devices That Perform Tasks. For Other Uses, See - Further InformationewbОценок пока нет
- Microsoft CorporationДокумент7 страницMicrosoft CorporationewbОценок пока нет
- Ebay Inc.: From Wikipedia, The Free EncyclopediaДокумент5 страницEbay Inc.: From Wikipedia, The Free EncyclopediaewbОценок пока нет
- Google Is An American: (Hide)Документ4 страницыGoogle Is An American: (Hide)ewbОценок пока нет
- For Other Types of Motorized Vehicles, See - For The 2006 Pixar Film, See - For Other Uses, See andДокумент4 страницыFor Other Types of Motorized Vehicles, See - For The 2006 Pixar Film, See - For Other Uses, See andewbОценок пока нет
- Plane or AircraftДокумент2 страницыPlane or AircraftewbОценок пока нет
- British Universal Bearing Piles: Product DimensionsДокумент1 страницаBritish Universal Bearing Piles: Product DimensionsewbОценок пока нет
- "Hello, World!" Program: "Hello World" Redirects Here. For Other Uses, SeeДокумент9 страниц"Hello, World!" Program: "Hello World" Redirects Here. For Other Uses, SeeewbОценок пока нет
- Portland Cement: Standard Specification ForДокумент9 страницPortland Cement: Standard Specification ForHishmat Ezz AlarabОценок пока нет
- BS EN 50483-6-2009 EnglishДокумент27 страницBS EN 50483-6-2009 EnglishДмитро Денис100% (2)
- CSCI 123 - Final ExamДокумент15 страницCSCI 123 - Final ExamBrianYoungОценок пока нет
- PERSONAL DEVELOPMENT (What Is Personal Development?)Документ37 страницPERSONAL DEVELOPMENT (What Is Personal Development?)Ronafe Roncal GibaОценок пока нет
- Disbursement VoucherДокумент7 страницDisbursement VoucherDan MarkОценок пока нет
- Topfast BRAND Catalogue Ingco 2021 MayДокумент116 страницTopfast BRAND Catalogue Ingco 2021 MayMoh AwadОценок пока нет
- Car Section 2 Series (H) Part-IiДокумент6 страницCar Section 2 Series (H) Part-Iipandurang nalawadeОценок пока нет
- Assessment PN1096617Документ14 страницAssessment PN1096617Amr TarekОценок пока нет
- Bulk Separator - V-1201 Method StatementДокумент2 страницыBulk Separator - V-1201 Method StatementRoshin99Оценок пока нет
- Unit 1: Power and Responsibility: 1. Important Leadership QualitiesДокумент6 страницUnit 1: Power and Responsibility: 1. Important Leadership QualitiesTrần Thanh MinhОценок пока нет
- EUCLIDДокумент3 страницыEUCLIDNandini MouryaОценок пока нет
- Contract 1 ProjectДокумент21 страницаContract 1 ProjectAditi BanerjeeОценок пока нет
- Solutions Jet FuelДокумент4 страницыSolutions Jet FuelkevinОценок пока нет
- Lecture Notes - Introduction To Big DataДокумент8 страницLecture Notes - Introduction To Big Datasakshi kureley0% (1)
- WKS 8 & 9 - Industrial Dryer 2T 2020-2021Документ26 страницWKS 8 & 9 - Industrial Dryer 2T 2020-2021Mei Lamfao100% (1)
- Registration Form - Synergies in Communication - 6th Edition - 2017-Drobot AnaДокумент3 страницыRegistration Form - Synergies in Communication - 6th Edition - 2017-Drobot AnaAna IrinaОценок пока нет
- Nielsen Report - The New Trend Among Indonesia's NetizensДокумент20 страницNielsen Report - The New Trend Among Indonesia's NetizensMarsha ImaniaraОценок пока нет
- L Rexx PDFДокумент9 страницL Rexx PDFborisg3Оценок пока нет
- CM011l E01 Exp.3 DeJuanДокумент3 страницыCM011l E01 Exp.3 DeJuanJarell De JuanОценок пока нет
- Schematic Circuits: Section C - ElectricsДокумент1 страницаSchematic Circuits: Section C - ElectricsIonut GrozaОценок пока нет
- Vacon NX, Non-Regenerative Front End FI9 UD01217B PDFДокумент48 страницVacon NX, Non-Regenerative Front End FI9 UD01217B PDFSilvian IonescuОценок пока нет
- Citing Correctly and Avoiding Plagiarism: MLA Format, 7th EditionДокумент4 страницыCiting Correctly and Avoiding Plagiarism: MLA Format, 7th EditionDanish muinОценок пока нет
- Ugtt April May 2019 NewДокумент48 страницUgtt April May 2019 NewSuhas SОценок пока нет
- TAPPI T 810 Om-06 Bursting Strength of Corrugated and Solid FiberboardДокумент5 страницTAPPI T 810 Om-06 Bursting Strength of Corrugated and Solid FiberboardNguyenSongHaoОценок пока нет
- What Is Public RelationsДокумент52 страницыWhat Is Public RelationsMarwa MoussaОценок пока нет
- Introduction To Templates in C++Документ16 страницIntroduction To Templates in C++hammarbytpОценок пока нет
- GSM BSC6000 Performance StatisticsДокумент72 страницыGSM BSC6000 Performance StatisticsAli AlshwalОценок пока нет
- Chapter 2.2 Quantitative Analysis NewДокумент44 страницыChapter 2.2 Quantitative Analysis NewMinase TilayeОценок пока нет
- Aug 21 Lab PhET Motion Graphs QuДокумент8 страницAug 21 Lab PhET Motion Graphs QureynandcpcОценок пока нет
- Tripura 04092012Документ48 страницTripura 04092012ARTHARSHI GARGОценок пока нет