Вам также может понравиться
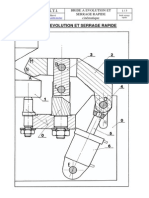
- Bride Serrage RapideДокумент3 страницыBride Serrage RapideRedaAbdraouf0% (2)
- TD N°3 PFS AnalytiqueДокумент6 страницTD N°3 PFS AnalytiqueRoubaОценок пока нет
- 08 Maquette Embrayag DisqueДокумент5 страниц08 Maquette Embrayag Disquederwiche100% (1)
- Cours Sur Les EmbrayagesДокумент7 страницCours Sur Les Embrayagesibrahim rabbajОценок пока нет
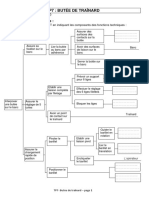
- 07 Butee TrainardДокумент5 страниц07 Butee TrainardHkiri MohamedОценок пока нет
- Pro 2017Документ14 страницPro 2017Crazy ytОценок пока нет
- Guidage Rotation App4Документ4 страницыGuidage Rotation App4Oussama MabroukОценок пока нет
- TP GuimaДокумент3 страницыTP GuimaKamel BousninaОценок пока нет
- Chap08 MAS PDFДокумент4 страницыChap08 MAS PDFCheikh Brahim Elkhadar100% (1)
- DS StatiqueДокумент2 страницыDS StatiqueAdil Hassani Idrissi100% (1)
- FormualireДокумент5 страницFormualireAdil Hassani IdrissiОценок пока нет
- Exercice 3-ConvertiДокумент3 страницыExercice 3-Convertichaouachi alarbiОценок пока нет
- DS2 PDFДокумент8 страницDS2 PDFAbdelilah Elmesbahi100% (1)
- Train Epicycloidal Simple PDFДокумент4 страницыTrain Epicycloidal Simple PDFEdgar ÉtapeОценок пока нет
- Invers 2020Документ3 страницыInvers 2020Mortadha RabahОценок пока нет
- TD 8Документ4 страницыTD 8Niane Møùstãphà BãssîrôūОценок пока нет
- 3 DS2 - DT 2020 - 2021Документ5 страниц3 DS2 - DT 2020 - 2021Elafif Hamdi100% (1)
- TD Synthèse-TOUR SEMI-AUTOMATIQUEДокумент26 страницTD Synthèse-TOUR SEMI-AUTOMATIQUEAb HanaeОценок пока нет
- TD-Presse MotoДокумент7 страницTD-Presse MotoSegaAlainCoulibalyОценок пока нет
- 8-Le Guidage en TranslationДокумент11 страниц8-Le Guidage en TranslationSegaAlainCoulibaly100% (2)
- 03 Exercice Roue Et Vis Sans FinДокумент1 страница03 Exercice Roue Et Vis Sans FinAhmed NajjarОценок пока нет
- Exercice Cinmatique Trajectoires Essuie Glace CorrigДокумент2 страницыExercice Cinmatique Trajectoires Essuie Glace Corrigspectrum66100% (1)
- TD FreinДокумент5 страницTD FreinHamami AymenОценок пока нет
- Variateurs CastellaДокумент2 страницыVariateurs CastellaaaaaОценок пока нет
- SciesauteusecorrectionДокумент3 страницыSciesauteusecorrectionyumiОценок пока нет
- TD Vis EcrouДокумент3 страницыTD Vis EcrouHoussam Had100% (1)
- Boite de VitesseДокумент8 страницBoite de VitesseHamami AymenОценок пока нет
- Devoir de Synthèse #2 - Génie Mécanique - Bac Technique (2013-2014) MR JEMAI Lotfi PDFДокумент10 страницDevoir de Synthèse #2 - Génie Mécanique - Bac Technique (2013-2014) MR JEMAI Lotfi PDFAmina NounaОценок пока нет
- TP10 Meca3D Scie SauteuseДокумент3 страницыTP10 Meca3D Scie SauteuseC'est YanaОценок пока нет
- Cours EmbrayageДокумент5 страницCours EmbrayageHasibKaabi100% (1)
- Technique CДокумент8 страницTechnique CHoussamHannadОценок пока нет
- Exercice ReducteurДокумент8 страницExercice ReducteurGyОценок пока нет
- Montage RoulementsДокумент4 страницыMontage RoulementsHoussam Had100% (2)
- Guidage en TranslationДокумент33 страницыGuidage en TranslationMohamed SaifОценок пока нет
- TdengrenageДокумент5 страницTdengrenageImane FarrassОценок пока нет
- Programmation Exercice N°2Документ3 страницыProgrammation Exercice N°2mathieu.angeardОценок пока нет
- EPREUVE TERMINALE CONSTRUSTION MECANIQUE (Enregistré Automatiquement) (Enregistré Automatiquement)Документ10 страницEPREUVE TERMINALE CONSTRUSTION MECANIQUE (Enregistré Automatiquement) (Enregistré Automatiquement)etoumbe Alfred100% (2)
- Statique Du SolideДокумент4 страницыStatique Du SolideHal Sof100% (1)
- SerrageДокумент3 страницыSerrageKiko Poli100% (3)
- Examens National 2bac Sci Genieur SMB 2016 R PDFДокумент26 страницExamens National 2bac Sci Genieur SMB 2016 R PDFHanane TounsiОценок пока нет
- DS1 ECAM3aДокумент4 страницыDS1 ECAM3aQuentin MoalОценок пока нет
- Systeme de Preformage Du CartonДокумент11 страницSysteme de Preformage Du Cartonassiahakmi67% (3)
- DM Quille PendulaireДокумент5 страницDM Quille PendulaireFilouОценок пока нет
- BTS CPI Juin 2000 Palan Eurochain VL5 U41Документ33 страницыBTS CPI Juin 2000 Palan Eurochain VL5 U41Yassire SamirОценок пока нет
- 1 TD Liaisons EncastrementДокумент9 страниц1 TD Liaisons EncastrementWael metouiОценок пока нет
- CI03 TD09 Sujet - Modéliser Le Comportement Cinématique Des Trains ÉpicycloïdauxДокумент6 страницCI03 TD09 Sujet - Modéliser Le Comportement Cinématique Des Trains ÉpicycloïdauxIsmail El MoufakirОценок пока нет
- 4 - Roues de FrictionДокумент8 страниц4 - Roues de Frictionesloch100% (1)
- 1-Guidage en RotationДокумент5 страниц1-Guidage en RotationHsjidi DjjdjdОценок пока нет
- CC1 Ie1 18 19Документ1 страницаCC1 Ie1 18 19Hamza RimiОценок пока нет
- 24 Roues de FrictionДокумент6 страниц24 Roues de FrictionDocteur SamОценок пока нет
- Serie Des TD N°4 Engrenages EMДокумент6 страницSerie Des TD N°4 Engrenages EMGrine Salah EddineОценок пока нет
- Corrige Technique Controle2018 PDFДокумент31 страницаCorrige Technique Controle2018 PDFHamami AymenОценок пока нет
- GM DM1-2015 CorrigeДокумент5 страницGM DM1-2015 Corrigefarane darvishiОценок пока нет
- dcn3 3t2 Dispositif D Entrainement CorrectionДокумент4 страницыdcn3 3t2 Dispositif D Entrainement CorrectionGuiliass100% (1)
- Fonction Transmettre Liaisons Pivot CoursДокумент8 страницFonction Transmettre Liaisons Pivot CoursChafik El HadiguiОценок пока нет
- Résumé-Cours-Guidage en Rotation - Guidage en Translation PDFДокумент62 страницыRésumé-Cours-Guidage en Rotation - Guidage en Translation PDFTaoufik Ben Hadid68% (19)
- Bac GM 2004 CorrectionДокумент12 страницBac GM 2004 Correctionseymon57Оценок пока нет
- Chapitre 6 - Guidage en TranslationДокумент13 страницChapitre 6 - Guidage en Translationahidouri100% (3)
- Exercices d'intégrales de lignes, de surfaces et de volumesОт EverandExercices d'intégrales de lignes, de surfaces et de volumesОценок пока нет
- C 04-02 PDFДокумент8 страницC 04-02 PDFkharrat samirОценок пока нет
- Pompe A Pistons Axiaux PDFДокумент8 страницPompe A Pistons Axiaux PDFNadia DridiОценок пока нет
- Calcul Des Boulons Au CisaillementДокумент2 страницыCalcul Des Boulons Au CisaillementNadia DridiОценок пока нет
- Chapitre.3 Partie.1Документ38 страницChapitre.3 Partie.1Nadia DridiОценок пока нет
- Corrige D Examen MNT PRV 4fДокумент3 страницыCorrige D Examen MNT PRV 4fNasserОценок пока нет
- Designation Materiaux v4Документ6 страницDesignation Materiaux v4Hatem LaajiliОценок пока нет
- Position Protection Animale ChasseДокумент9 страницPosition Protection Animale ChasseNadia DridiОценок пока нет
- Pompe A Pistons Axiaux PDFДокумент8 страницPompe A Pistons Axiaux PDFNadia DridiОценок пока нет
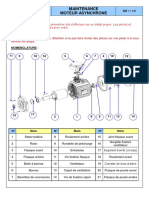
- Démontage Remontage - Maintenance Moteur PDFДокумент5 страницDémontage Remontage - Maintenance Moteur PDFMayor Nfmn100% (2)
- m14 Sensibilisation A La Qualite Ge EsaДокумент75 страницm14 Sensibilisation A La Qualite Ge EsaNadia DridiОценок пока нет
- Tap PDFДокумент248 страницTap PDFNadia DridiОценок пока нет
- Empreintesv 6Документ17 страницEmpreintesv 6amrОценок пока нет
- Metrologie de BaseДокумент8 страницMetrologie de BaseA. samir86% (7)
- Sujet 1 PDFДокумент10 страницSujet 1 PDFLarbi ElbakkaliОценок пока нет
- Accoudoirv 5Документ46 страницAccoudoirv 5Nadia DridiОценок пока нет
- Caracteristiques Des HuilesДокумент9 страницCaracteristiques Des Huilessl1962100% (1)
- EffetgyroscopiqueДокумент22 страницыEffetgyroscopiqueNadia DridiОценок пока нет
- Examen 2013Документ4 страницыExamen 2013Brahim MouhcineОценок пока нет
- Plan de MouleДокумент1 страницаPlan de MouleNadia DridiОценок пока нет
- Automobile 1 V 2Документ41 страницаAutomobile 1 V 2Nadia DridiОценок пока нет
- Vocabulaire Moule DinjectionДокумент1 страницаVocabulaire Moule DinjectionMouradBenSedrineОценок пока нет
- Torsion Act (Banc D'essai)Документ4 страницыTorsion Act (Banc D'essai)Nadia DridiОценок пока нет
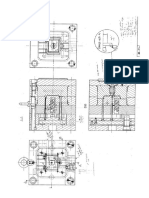
- Moule D'injectionДокумент3 страницыMoule D'injectionNadia DridiОценок пока нет
- Vocabulaire Moule DinjectionДокумент1 страницаVocabulaire Moule DinjectionMouradBenSedrineОценок пока нет
- Carte de L'europe À ImprimerДокумент1 страницаCarte de L'europe À ImprimerNadia DridiОценок пока нет
- Caractéristiques Équivalentes D'inertie de Mécanismes CourantsДокумент2 страницыCaractéristiques Équivalentes D'inertie de Mécanismes CourantsNadia DridiОценок пока нет
- Operations Geometriques 2DДокумент12 страницOperations Geometriques 2DNadia DridiОценок пока нет
- Caractéristiques Équivalentes D'inertie de Mécanismes CourantsДокумент2 страницыCaractéristiques Équivalentes D'inertie de Mécanismes CourantsNadia DridiОценок пока нет
- Implementation D Un Modele de ComportemeДокумент3 страницыImplementation D Un Modele de ComportemeNadia DridiОценок пока нет
- 1.les Actionsmecanique-1Документ3 страницы1.les Actionsmecanique-1Samba SallОценок пока нет
- RDM Chap2Документ16 страницRDM Chap2Aymen Khalfaoui100% (1)
- Exercices Hydraulique Theorique-1Документ5 страницExercices Hydraulique Theorique-1Salah Eddine SebbarОценок пока нет
- UTF8-B-RXR1ZGUgZCd1biBoYW5nYXIgZW4gY2hhcnBlbnRlIG1ldGFsbGlxdWUgw6A - UTF8-B-IHVzYWdlIGRlIHN0b2NrYWdlIGF2ZWMgdW4gcG9udCByb3VsYW50Li5wZGY - PDFДокумент266 страницUTF8-B-RXR1ZGUgZCd1biBoYW5nYXIgZW4gY2hhcnBlbnRlIG1ldGFsbGlxdWUgw6A - UTF8-B-IHVzYWdlIGRlIHN0b2NrYWdlIGF2ZWMgdW4gcG9udCByb3VsYW50Li5wZGY - PDFSamsouma BkОценок пока нет
- Comportement Dynamique Des Structures, G-HivinДокумент62 страницыComportement Dynamique Des Structures, G-HivinChoo JaaОценок пока нет
- ch4 Principes de La Mecanique ElДокумент7 страницch4 Principes de La Mecanique ElHAMADA1972Оценок пока нет
- Belmihoub RymДокумент109 страницBelmihoub RymMohammed DahbiОценок пока нет
- +++ Joint Labyrinthe - Thèse PDFДокумент172 страницы+++ Joint Labyrinthe - Thèse PDFnadjib62Оценок пока нет
- Propagation D'une Onde Électromagnétique Plane Dans Le Vide (2) - Propagation D'une Onde Électromagnétique Plane Dans Le Vide PDFДокумент4 страницыPropagation D'une Onde Électromagnétique Plane Dans Le Vide (2) - Propagation D'une Onde Électromagnétique Plane Dans Le Vide PDFsteve kadjeОценок пока нет
- Las9 ChampMagnetiqueДокумент8 страницLas9 ChampMagnetiqueNabil Ait BrahimОценок пока нет
- Note de Calcul PoteauДокумент15 страницNote de Calcul PoteauOlivier Rack Royal100% (1)
- Etude D'un Hangar Métallique de StockageДокумент108 страницEtude D'un Hangar Métallique de StockageChakir AbdessamadОценок пока нет
- TP Du Viscosité Et Detection Ds FuitesДокумент7 страницTP Du Viscosité Et Detection Ds FuitesZAAIRA HAMZAОценок пока нет
- TP FlexionДокумент5 страницTP FlexionJamkimos YasnasyouОценок пока нет
- CHAPITRE 3 Cinétique Du SolideДокумент29 страницCHAPITRE 3 Cinétique Du Solideyoussefachaaou10Оценок пока нет
- TP MDF03Документ9 страницTP MDF03imenОценок пока нет
- MSG30-3245 FRДокумент68 страницMSG30-3245 FRlaurentmbambi3Оценок пока нет
- Mines Pont Extrait 2011 CorrigéДокумент4 страницыMines Pont Extrait 2011 Corrigézazazaz2000Оценок пока нет
- TD N°2 ThermodynamiqueДокумент2 страницыTD N°2 Thermodynamiquezakaria koneОценок пока нет
- Multicel FRДокумент4 страницыMulticel FRGef StarcrowОценок пока нет
- Corrigé TD SVT 2015 Mécanique 1-8Документ2 страницыCorrigé TD SVT 2015 Mécanique 1-8Jaouad DiouriОценок пока нет
- ViscositéДокумент6 страницViscositéLI ASОценок пока нет
- Corrige de La Serie 3Документ6 страницCorrige de La Serie 3dfghОценок пока нет
- Chapitre III Décantation 2014Документ7 страницChapitre III Décantation 2014Saber MounirОценок пока нет
- Connaissance de La Mécanique Appliquée BAEL BTP-TSCTДокумент109 страницConnaissance de La Mécanique Appliquée BAEL BTP-TSCTIkram Khalyl100% (3)
- Chapitre 1 Dynamique Du Solide 2020Документ16 страницChapitre 1 Dynamique Du Solide 2020saada boboОценок пока нет
- IUTTLSR Mecanique-Des-structures 2010 GCДокумент2 страницыIUTTLSR Mecanique-Des-structures 2010 GCBELSОценок пока нет
- Série Rappel Mathématique Et Corrigé 2020-2021Документ3 страницыSérie Rappel Mathématique Et Corrigé 2020-2021Ranime NourОценок пока нет
- Dipole ElectrostatiqueДокумент5 страницDipole Electrostatiquesoufian ensetОценок пока нет
- Controle 1 S2 3APIC Mod13 (WWW - Pc1.ma)Документ1 страницаControle 1 S2 3APIC Mod13 (WWW - Pc1.ma)Mohamed BarkhoussОценок пока нет