Вам также может понравиться
- Fiche Resume 5 MCCДокумент4 страницыFiche Resume 5 MCCBENSALAH AminaОценок пока нет
- TP MS2option PDFДокумент7 страницTP MS2option PDFاحمد أم حمزةОценок пока нет
- TP 2018 OrdiДокумент2 страницыTP 2018 Ordialex bbapОценок пока нет
- TP Compte Rendu Photovoltaiques 1Документ26 страницTP Compte Rendu Photovoltaiques 1amrisalma72Оценок пока нет
- Regulation de Temperatur PidДокумент8 страницRegulation de Temperatur PidabdoОценок пока нет
- Logiciel Eoliennes Matlab-SimulinkДокумент6 страницLogiciel Eoliennes Matlab-SimulinkDIAO100% (2)
- Objectif FusionnéДокумент11 страницObjectif FusionnéAmigo AmigoОценок пока нет
- CNL Adaptative MSAPДокумент71 страницаCNL Adaptative MSAPhvhvyОценок пока нет
- Sup'Ptic: Itt2 ANNEE ACADEMIQUE 2017-2018Документ2 страницыSup'Ptic: Itt2 ANNEE ACADEMIQUE 2017-2018Angel100% (1)
- Les Hacheurs: Exposé Electronique de PuissanceДокумент20 страницLes Hacheurs: Exposé Electronique de PuissanceTaideleОценок пока нет
- TP AutomatiqueДокумент63 страницыTP AutomatiqueNabil BounouОценок пока нет
- Série de TD N°1 QuestionsДокумент3 страницыSérie de TD N°1 Questionsakkal saadiОценок пока нет
- EolienneДокумент17 страницEolienneYassine LakhalОценок пока нет
- TP4 - Filtres ActifsДокумент8 страницTP4 - Filtres ActifsBecem Trigui100% (1)
- Examen Variateurs 2 Juillet 2021Документ16 страницExamen Variateurs 2 Juillet 2021Mo BaLaОценок пока нет
- Compte Rendu: TP2: Réglage Empirique Du Correcteur PIDДокумент9 страницCompte Rendu: TP2: Réglage Empirique Du Correcteur PIDomar sahamoudiОценок пока нет
- IIA - Régulation Et Asszervissement - Chap3 - Schema Bloc - 20 Oct 22Документ4 страницыIIA - Régulation Et Asszervissement - Chap3 - Schema Bloc - 20 Oct 22TECHNOLOGIES MODERNES DU CAMEROUNОценок пока нет
- TPДокумент12 страницTPAhmed AttaouiОценок пока нет
- TP EolienneДокумент14 страницTP EolienneOmar CharifОценок пока нет
- These Etude Et Realisation Dun Systeme Suiveur Solaire A Deux AxesДокумент84 страницыThese Etude Et Realisation Dun Systeme Suiveur Solaire A Deux Axesyouness MARFIKОценок пока нет
- Corrigé de TD N°2 - Hacheur PDFДокумент4 страницыCorrigé de TD N°2 - Hacheur PDFKhir DinОценок пока нет
- TD N°3 AutomatiqueДокумент7 страницTD N°3 AutomatiqueFadelОценок пока нет
- Carte DspaceДокумент54 страницыCarte DspaceMeriamChadram100% (3)
- Mini Projet NS544-ConvertiДокумент13 страницMini Projet NS544-ConvertiKhiri MohamedaymenОценок пока нет
- TP Arithmétique Binaire (TP N°1)Документ2 страницыTP Arithmétique Binaire (TP N°1)abir saal100% (1)
- 1777.ahmed El Hday - TP HomerДокумент11 страниц1777.ahmed El Hday - TP HomerSifgОценок пока нет
- BacsДокумент6 страницBacsmassinisssa100% (1)
- Tpe Conception Des Systèmes PV AutonomeДокумент21 страницаTpe Conception Des Systèmes PV AutonomeElsa KouamouОценок пока нет
- Dimensionnement D Un Systeme D EntrainementДокумент11 страницDimensionnement D Un Systeme D Entrainementmahdi hadhriОценок пока нет
- 2 Auto Automatique Et SystèmeДокумент56 страниц2 Auto Automatique Et SystèmeHmz OussamaОценок пока нет
- PIC16F877 GEII-courtДокумент33 страницыPIC16F877 GEII-courtyosep soapazОценок пока нет
- Gsde Cat General GuntДокумент144 страницыGsde Cat General Guntoriginyoucef17Оценок пока нет
- Chapitre 4 Reglagedesregulateurs PID2021Документ11 страницChapitre 4 Reglagedesregulateurs PID2021Salim BouaziziОценок пока нет
- CEM Ds Les Alimentations A Decoupage ZДокумент18 страницCEM Ds Les Alimentations A Decoupage Zberkane chrifaОценок пока нет
- Modélisation Et Simulation D'Une Machine Asynchrone À Cage À L'Aide Du Logiciel Matlab/SimulinkДокумент9 страницModélisation Et Simulation D'Une Machine Asynchrone À Cage À L'Aide Du Logiciel Matlab/SimulinkIlyes IsaacОценок пока нет
- Memoire Fin D'etude Pendule InverséДокумент71 страницаMemoire Fin D'etude Pendule Inversélogiciel en ligneОценок пока нет
- IIA - Régulation Et AsszervissementДокумент23 страницыIIA - Régulation Et AsszervissementTECHNOLOGIES MODERNES DU CAMEROUNОценок пока нет
- TD 3 Elt IndДокумент2 страницыTD 3 Elt IndFarouk BoukorttОценок пока нет
- Présentation AcwapowerДокумент35 страницPrésentation AcwapowerSoufian EelОценок пока нет
- TD 1: Méthode SADT Exercice 1: Etude D'un Silo PortuaireДокумент7 страницTD 1: Méthode SADT Exercice 1: Etude D'un Silo PortuaireNouha Mnassri100% (1)
- Chapitre 2 - Modélisation de La Machine Asynchrone Et Synchrone - 2018 - 2019Документ19 страницChapitre 2 - Modélisation de La Machine Asynchrone Et Synchrone - 2018 - 2019Ali MEDJGHOUОценок пока нет
- ProfibusДокумент21 страницаProfibussid ali saidjОценок пока нет
- Regulation de La Vitesse DДокумент8 страницRegulation de La Vitesse Dbadre989100% (2)
- Rendement Facteur de Puissance Et La Regulation D'Une Ligne de Transport D'Energie ElectriqueДокумент2 страницыRendement Facteur de Puissance Et La Regulation D'Une Ligne de Transport D'Energie ElectriqueaissaОценок пока нет
- Rapport de StageДокумент39 страницRapport de StageBrahim EnnajiОценок пока нет
- TP 2 GMDVДокумент6 страницTP 2 GMDVmewguv Ahmed salekОценок пока нет
- Cours ErДокумент290 страницCours Erroi99Оценок пока нет
- TP2 Machines ElectriquesДокумент6 страницTP2 Machines ElectriquesHamza HachimОценок пока нет
- Systemes Echantillonnés D'ordre 2Документ2 страницыSystemes Echantillonnés D'ordre 2khayyamОценок пока нет
- Etude Et Simulation D'un Capteur de Pression CapacitifДокумент79 страницEtude Et Simulation D'un Capteur de Pression CapacitifHassan B'ouОценок пока нет
- Bille Sur Rail - Partie1Документ2 страницыBille Sur Rail - Partie1Yesmine GueddanaОценок пока нет
- Chapitre4 Les RégulateursPIDДокумент11 страницChapitre4 Les RégulateursPIDSalim Bouazizi100% (1)
- Protocole DeviceNetДокумент55 страницProtocole DeviceNetLachari AchrafОценок пока нет
- Projet Fin D'annee2Документ35 страницProjet Fin D'annee2Mhiri IskanderОценок пока нет
- Fichier Fascicule TPДокумент16 страницFichier Fascicule TPorg 2019Оценок пока нет
- Stage D'initiationДокумент19 страницStage D'initiationAfifa JridiОценок пока нет
- 727 PDFДокумент93 страницы727 PDFBachir BchiriОценок пока нет
- TP ScalaireДокумент1 страницаTP ScalaireYouness Ait laasriОценок пока нет
- Introduction Aux Équations Aux Dérivées Partielles LinéairesДокумент21 страницаIntroduction Aux Équations Aux Dérivées Partielles LinéairesProjet AutomatiqueОценок пока нет
- Rapprt Stage Spie JIOUDI TOURARIДокумент40 страницRapprt Stage Spie JIOUDI TOURARIProjet Automatique67% (3)
- CSTG Tht-Base TensionДокумент220 страницCSTG Tht-Base TensionProjet AutomatiqueОценок пока нет
- Rapport FinaleДокумент150 страницRapport FinaleProjet Automatique0% (1)
- Check List FRДокумент1 страницаCheck List FRProjet Automatique100% (2)
- Contrôle Electronique NumériqueДокумент3 страницыContrôle Electronique NumériqueProjet AutomatiqueОценок пока нет
- Etude Et Analyse Des Harmoniqu - ELMAALMY Youness - 540Документ48 страницEtude Et Analyse Des Harmoniqu - ELMAALMY Youness - 540Projet Automatique100% (1)
- Brochure Mge Galaxy 300 998Документ6 страницBrochure Mge Galaxy 300 998Projet AutomatiqueОценок пока нет
- Mémoire PFE - AfricainДокумент114 страницMémoire PFE - AfricainProjet Automatique100% (1)
- PFE Alstom GridДокумент213 страницPFE Alstom GridProjet Automatique88% (8)
- CHAPITRE I Electronique Fondamentale 1 PDFДокумент15 страницCHAPITRE I Electronique Fondamentale 1 PDFBoudjema SoudedОценок пока нет
- Notice D'utilisation GSV 8AS GSVMultiДокумент34 страницыNotice D'utilisation GSV 8AS GSVMultiDavid GERARDОценок пока нет
- Choix DisjДокумент11 страницChoix Disjboufakri abdelmounaimОценок пока нет
- Induction Magnétique 2Документ8 страницInduction Magnétique 2Ben ZeilanОценок пока нет
- Didacticiel de 1134Документ55 страницDidacticiel de 1134mauricetappaОценок пока нет
- Guide - Tableau Electrique Comprendre Choisir CablerДокумент32 страницыGuide - Tableau Electrique Comprendre Choisir CableralflyОценок пока нет
- Electricité Industriel de BaseДокумент54 страницыElectricité Industriel de BaseKhalid Tami50% (2)
- Exposé FinalДокумент38 страницExposé Finalchiabsassiyahoofr100% (2)
- TD - Capteurs - MMSS 2017 2018 Série1Документ2 страницыTD - Capteurs - MMSS 2017 2018 Série1Abdelkarim RamОценок пока нет
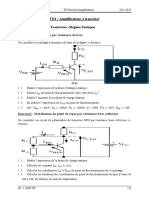
- TD1: Amplifications À Transistor I. Polarisation de Transistors (Régime Statique)Документ3 страницыTD1: Amplifications À Transistor I. Polarisation de Transistors (Régime Statique)Seydina Ndiaye100% (1)
- Archi Cours4Документ22 страницыArchi Cours4Abdeslam MOUKHLISSОценок пока нет
- +h10 Cellule Arrivee Secours r1Документ25 страниц+h10 Cellule Arrivee Secours r1Djamel BeddarОценок пока нет
- Cours - ABDELLI Radia - Théorie Du SignalДокумент68 страницCours - ABDELLI Radia - Théorie Du SignalHayet HayetОценок пока нет
- MOTORTECH Indicateur Tension EN-FRДокумент4 страницыMOTORTECH Indicateur Tension EN-FRdrevetph6233Оценок пока нет
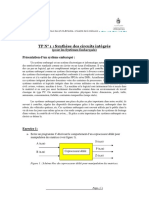
- TP #1: Synthèse Des Circuits Intégrés: Présentation D'un Système EmbarquéДокумент2 страницыTP #1: Synthèse Des Circuits Intégrés: Présentation D'un Système EmbarquéAziz SaijiОценок пока нет
- Exercice D'application 2 Modulation D'amplitudeДокумент1 страницаExercice D'application 2 Modulation D'amplitudeHk HjОценок пока нет
- TP3 ElectroДокумент5 страницTP3 ElectroSimo Kbiri AlaouiОценок пока нет
- Manuel Caneco BT Nouveautés V5.4-FraДокумент48 страницManuel Caneco BT Nouveautés V5.4-FraYDDFPОценок пока нет
- D - Le Conducteur OhmiqueДокумент2 страницыD - Le Conducteur Ohmiquesamara hadaОценок пока нет
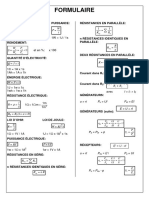
- Formulaire D ElectrotechniqueДокумент4 страницыFormulaire D ElectrotechniquechoukriОценок пока нет
- M - 04 - Analyse de Circuits À Courant ContinuДокумент51 страницаM - 04 - Analyse de Circuits À Courant Continualmis100% (2)
- TD 2 EcДокумент2 страницыTD 2 EcChai mae AgnawОценок пока нет
- 119T7030 A3-3 PDFДокумент18 страниц119T7030 A3-3 PDFAymen SkanderОценок пока нет
- Classeur 1Документ8 страницClasseur 1Brahim BouifouloussenОценок пока нет
- Article I.1 Variante ROHSSДокумент6 страницArticle I.1 Variante ROHSSomar boukhrisОценок пока нет
- Circuits SequentielsДокумент61 страницаCircuits SequentielsDjouweinannodji YvesОценок пока нет
- TD 9 Chaîne de Séchage Peinture - UF3-M3Документ7 страницTD 9 Chaîne de Séchage Peinture - UF3-M3hamzaОценок пока нет
- Devoir de Contrôle N°2 - Sciences Physiques - Bac Sciences Exp (2020-2021) MR Handoura NaceurДокумент5 страницDevoir de Contrôle N°2 - Sciences Physiques - Bac Sciences Exp (2020-2021) MR Handoura NaceurchihebОценок пока нет
- Devoir de Synthese 3-GEДокумент4 страницыDevoir de Synthese 3-GEBouabdellaoui saif ennasrОценок пока нет
- 03 Force PlaceДокумент8 страниц03 Force PlaceZzen NaxcОценок пока нет