Вам также может понравиться
- Faf-T8 1bДокумент11 страницFaf-T8 1bRenzo EchevarriaОценок пока нет
- Faf-T8 3Документ9 страницFaf-T8 3Renzo EchevarriaОценок пока нет
- Faf-T8 2Документ13 страницFaf-T8 2Renzo EchevarriaОценок пока нет
- Dialnet ProblemasDeResistenciaDeMateriales 267957 PDFДокумент460 страницDialnet ProblemasDeResistenciaDeMateriales 267957 PDFjohan100% (2)
- Sesion 01 - Teoria de La AdministracionДокумент32 страницыSesion 01 - Teoria de La AdministracionRenzo EchevarriaОценок пока нет
- Vacantes para Estudiantes de PeruДокумент32 страницыVacantes para Estudiantes de PeruRenzo EchevarriaОценок пока нет
- CadenasДокумент2 страницыCadenasRenzo EchevarriaОценок пока нет
- Tema 8. Mecanismos de Daño Vinculados A La Corrosión Sesión 8: Primera Parte A Fundamentos de La Corrosión ElectroquímicaДокумент10 страницTema 8. Mecanismos de Daño Vinculados A La Corrosión Sesión 8: Primera Parte A Fundamentos de La Corrosión ElectroquímicaRenzo EchevarriaОценок пока нет
- Arduino Tutorial 01Документ15 страницArduino Tutorial 01Sebastian EspinozaОценок пока нет
- Acceso y uso Cambridge BookshelfДокумент9 страницAcceso y uso Cambridge BookshelfRenzo EchevarriaОценок пока нет
- Grupo2 - Buena Vida y Sentido de FelicidadДокумент9 страницGrupo2 - Buena Vida y Sentido de FelicidadRenzo EchevarriaОценок пока нет
- Datos Lab 2Документ3 страницыDatos Lab 2Renzo EchevarriaОценок пока нет
- Informe LAB 5 TransferДокумент8 страницInforme LAB 5 TransferRenzo EchevarriaОценок пока нет
- Acabado Superficial 139-137-1-PB PDFДокумент10 страницAcabado Superficial 139-137-1-PB PDF9082888lcОценок пока нет
- CaratulaДокумент2 страницыCaratulaRenzo EchevarriaОценок пока нет
- Primera Practica Supervisada Preprofesional 2019-1Документ16 страницPrimera Practica Supervisada Preprofesional 2019-1Renzo EchevarriaОценок пока нет
- Cap 2 Fluidos Estática de Fluidos 2018 2Документ50 страницCap 2 Fluidos Estática de Fluidos 2018 2Renzo EchevarriaОценок пока нет
- Capítulo 2 - EJERCICIOSДокумент6 страницCapítulo 2 - EJERCICIOSRenzo EchevarriaОценок пока нет
- Ie 314Документ5 страницIe 314Renzo EchevarriaОценок пока нет
- TeoriaengranajesДокумент37 страницTeoriaengranajesHenry AvalosОценок пока нет
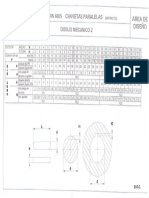
- DIN 6885 - Chaveta - Seccion (Extracto) PDFДокумент1 страницаDIN 6885 - Chaveta - Seccion (Extracto) PDFRenzo EchevarriaОценок пока нет
- Unidad de Aprendizaje: Ecologia en La Salud Tema: Estructura Y Funcionamiento de La NaturalezaДокумент32 страницыUnidad de Aprendizaje: Ecologia en La Salud Tema: Estructura Y Funcionamiento de La NaturalezaSumac TimeОценок пока нет
- Rectificador Media Onda Lab Electricidad ElectrónicaДокумент18 страницRectificador Media Onda Lab Electricidad ElectrónicaGinaGonzalesPulidoОценок пока нет
- Conversión unidades almacenamientoДокумент1 страницаConversión unidades almacenamientoGARGANO SRLОценок пока нет
- Parcial Semana 4 RevisadosДокумент8 страницParcial Semana 4 RevisadosANDRES MUÑOZ100% (2)
- Spsu-865 Ejercicio T001.Документ12 страницSpsu-865 Ejercicio T001.Valeria Prieto YsmiñoОценок пока нет
- VZH Manual Baterias AutomotricesДокумент32 страницыVZH Manual Baterias AutomotricesJ.ENRIQUEZ.BОценок пока нет
- Tendencias de Las Relaciones PúblicasДокумент6 страницTendencias de Las Relaciones PúblicasMario Alfredo CantareroОценок пока нет
- Manual de Partes Combat 125Документ67 страницManual de Partes Combat 125Dicadur Dcdr67% (3)
- Algebra Páginas 1 7,26 247Документ229 страницAlgebra Páginas 1 7,26 247a7mlt0% (1)
- Informe LacrimógenasДокумент23 страницыInforme LacrimógenasAnibal Vivaceta100% (1)
- Hardy CrossДокумент58 страницHardy CrossJOAN MORALES NARVAEZОценок пока нет
- PDFДокумент170 страницPDFvan hidОценок пока нет
- Informe Maquinas 1 Marco TeoricoДокумент7 страницInforme Maquinas 1 Marco TeoricoAnonymous GcNo6ivОценок пока нет
- Nif D-5 ArrendamientoДокумент88 страницNif D-5 ArrendamientoALBERTO RIVERA SOLORZANO100% (1)
- Bebidas Bolivianas BBO S.A.Документ19 страницBebidas Bolivianas BBO S.A.Cesar Viveros ChavezОценок пока нет
- Informe Final Junta de Condominio Gestion 2017Документ6 страницInforme Final Junta de Condominio Gestion 2017api-35268547067% (3)
- Curso Electricidad Domiciliaria BasicaДокумент107 страницCurso Electricidad Domiciliaria BasicaErwin Yañez Calfante100% (1)
- Actividades n.3Документ19 страницActividades n.3Maury GuillénОценок пока нет
- Picasso Clínica Veterinaria (FINAL) PDFДокумент50 страницPicasso Clínica Veterinaria (FINAL) PDFDanielTomilleroRodriguezОценок пока нет
- La Dispersión IónicaДокумент8 страницLa Dispersión IónicaMrthe MrtheОценок пока нет
- CarbohidratosДокумент70 страницCarbohidratosFrancisco RoblesОценок пока нет
- Plan de Area Educación Fisica 4° 2022Документ3 страницыPlan de Area Educación Fisica 4° 2022liliana consuelo valdes ocampoОценок пока нет
- Desinfeccion de Alto NivelДокумент24 страницыDesinfeccion de Alto NivelAydee Quispe Arango100% (1)
- Pantallas flexibles y transparentes con grafeno y OLEDДокумент12 страницPantallas flexibles y transparentes con grafeno y OLEDCarlosMoralesОценок пока нет
- Leccion 5 EscatologíaДокумент8 страницLeccion 5 EscatologíaKevin VelasquezОценок пока нет
- Proyecto de vida DOFAДокумент3 страницыProyecto de vida DOFAMauricio CharresОценок пока нет
- La Revolucion DarwinianadocxДокумент5 страницLa Revolucion DarwinianadocxBolt OficialОценок пока нет
- Nuevasntendenciasnseleccionndenpersonal 3362d575a46a094Документ18 страницNuevasntendenciasnseleccionndenpersonal 3362d575a46a094Shirli DanielaОценок пока нет
- Oleoductos BrazilДокумент16 страницOleoductos BrazilJägerMeister CvОценок пока нет
- Procedimiento Control de Documentos y RegistrosДокумент10 страницProcedimiento Control de Documentos y RegistrosEcolodge AlmejalОценок пока нет