Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Bill Swad's Wealth Building Strategies - SwadДокумент87 страницBill Swad's Wealth Building Strategies - Swadjovetzky50% (2)
- The Role of OrganisationДокумент9 страницThe Role of OrganisationMadhury MosharrofОценок пока нет
- Napoleon RXT425SIBPK Owner's ManualДокумент48 страницNapoleon RXT425SIBPK Owner's ManualFaraaz DamjiОценок пока нет
- Gravity Based Foundations For Offshore Wind FarmsДокумент121 страницаGravity Based Foundations For Offshore Wind FarmsBent1988Оценок пока нет
- SH210 5 SERVCE CD PDF Pages 1 33Документ33 страницыSH210 5 SERVCE CD PDF Pages 1 33Em sulistio87% (23)
- A CMOS Current-Mode Operational Amplifier: Thomas KaulbergДокумент4 страницыA CMOS Current-Mode Operational Amplifier: Thomas KaulbergAbesamis RanmaОценок пока нет
- Shopnil Tower 45KVA EicherДокумент4 страницыShopnil Tower 45KVA EicherBrown builderОценок пока нет
- Heat TreatmentsДокумент14 страницHeat Treatmentsravishankar100% (1)
- Principles of SOAДокумент36 страницPrinciples of SOANgoc LeОценок пока нет
- Staircase and Lintel As-03Документ1 страницаStaircase and Lintel As-03Divith B SannakkiОценок пока нет
- Design & Construction of New River Bridge On Mula RiverДокумент133 страницыDesign & Construction of New River Bridge On Mula RiverJalal TamboliОценок пока нет
- SQL Datetime Conversion - String Date Convert Formats - SQLUSA PDFДокумент13 страницSQL Datetime Conversion - String Date Convert Formats - SQLUSA PDFRaul E CardozoОценок пока нет
- Exoskeleton ArmДокумент5 страницExoskeleton Armc214ocОценок пока нет
- Huawei Core Roadmap TRM10 Dec 14 2011 FinalДокумент70 страницHuawei Core Roadmap TRM10 Dec 14 2011 Finalfirasibraheem100% (1)
- Scope: Provisional Method - 1994 © 1984 TAPPIДокумент3 страницыScope: Provisional Method - 1994 © 1984 TAPPIМаркус СилваОценок пока нет
- Mpi Model QuestionsДокумент4 страницыMpi Model QuestionshemanthnagОценок пока нет
- OrganometallicsДокумент53 страницыOrganometallicsSaman KadambОценок пока нет
- Overcurrent CoordinationДокумент93 страницыOvercurrent CoordinationKumar100% (1)
- Pro Tools ShortcutsДокумент5 страницPro Tools ShortcutsSteveJones100% (1)
- Kayako Support Suite User Manual PDFДокумент517 страницKayako Support Suite User Manual PDFallQoo SEO BaiduОценок пока нет
- Tenancy Law ReviewerДокумент19 страницTenancy Law ReviewerSef KimОценок пока нет
- Ramp Footing "RF" Wall Footing-1 Detail: Blow-Up Detail "B"Документ2 страницыRamp Footing "RF" Wall Footing-1 Detail: Blow-Up Detail "B"Genevieve GayosoОценок пока нет
- ReviewerДокумент2 страницыReviewerAra Mae Pandez HugoОценок пока нет
- Agoura Hills DIVISION - 6. - NOISE - REGULATIONSДокумент4 страницыAgoura Hills DIVISION - 6. - NOISE - REGULATIONSKyle KimОценок пока нет
- The Concept of ElasticityДокумент19 страницThe Concept of ElasticityVienRiveraОценок пока нет
- White Button Mushroom Cultivation ManualДокумент8 страницWhite Button Mushroom Cultivation ManualKhurram Ismail100% (4)
- TOEFLДокумент6 страницTOEFLSekar InnayahОценок пока нет
- Chat Application (Collg Report)Документ31 страницаChat Application (Collg Report)Kartik WadehraОценок пока нет
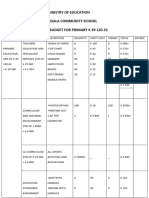
- Ministry of Education Musala SCHДокумент5 страницMinistry of Education Musala SCHlaonimosesОценок пока нет
- CY8 C95 X 0 AДокумент32 страницыCY8 C95 X 0 AAnonymous 60esBJZIj100% (1)