Вам также может понравиться
- Fundamentals of CADДокумент83 страницыFundamentals of CADAamir Hasan KhanОценок пока нет
- Unit 23: Computer Aided Design and Manufacture (CAD/CAM) : Unit Code J/615/1497 Unit Level 4 Credit Value 15Документ6 страницUnit 23: Computer Aided Design and Manufacture (CAD/CAM) : Unit Code J/615/1497 Unit Level 4 Credit Value 15Pratik008Оценок пока нет
- Computer Aided Design and AnalysisДокумент25 страницComputer Aided Design and AnalysisOyedotun TundeОценок пока нет
- Curriculum Guide Creo Elements Direct 18-1Документ37 страницCurriculum Guide Creo Elements Direct 18-1Larisa LoredanaОценок пока нет
- Project Civil Engineering DrawingДокумент1 страницаProject Civil Engineering DrawingFizz MartinОценок пока нет
- ANSYS Meshing CFD Case 1 - Generic CombustorДокумент12 страницANSYS Meshing CFD Case 1 - Generic CombustorDivyesh PatelОценок пока нет
- Cad Cam Cae ChallengesДокумент13 страницCad Cam Cae ChallengesManoj Dhage0% (1)
- Bridge Detailing 2.0: Computational Modelling Methods Using Civil 3D, Revit & DynamoДокумент18 страницBridge Detailing 2.0: Computational Modelling Methods Using Civil 3D, Revit & DynamoJignesh100% (1)
- Product Libraries in Ifc Format - buildingSMARTДокумент17 страницProduct Libraries in Ifc Format - buildingSMARTlaurenssenОценок пока нет
- CAM FinalДокумент5 страницCAM FinalYatish TagraОценок пока нет
- Maritime Globalpresentation en Jan2020 OptimizedДокумент207 страницMaritime Globalpresentation en Jan2020 OptimizeddlopezarОценок пока нет
- CATIA R2016x Functionnal OverviewДокумент46 страницCATIA R2016x Functionnal OverviewXaockaОценок пока нет
- Generative Shape DesignДокумент173 страницыGenerative Shape Designjaskaran singhОценок пока нет
- Basic: Cad-Based For Greater PowerДокумент2 страницыBasic: Cad-Based For Greater PowerraduvascautiОценок пока нет
- Final CadДокумент24 страницыFinal CadPRATEEK GOYALОценок пока нет
- IFC ThesisДокумент63 страницыIFC ThesisMrsSiqueiraОценок пока нет
- Final Report FB-2018-1 PDFДокумент75 страницFinal Report FB-2018-1 PDFRatik GaonkarОценок пока нет
- c01 nx8.5 EvalДокумент20 страницc01 nx8.5 EvalSeshi ReddyОценок пока нет
- Cad Notes PDFДокумент61 страницаCad Notes PDFSuresh Natarajan100% (3)
- AasdfgДокумент4 страницыAasdfgmcrajpuraОценок пока нет
- CATIA CAD Customization Automation API Job ProjectsДокумент10 страницCATIA CAD Customization Automation API Job ProjectssarfrajОценок пока нет
- MT10420-NX3.01 Student GuideДокумент6 страницMT10420-NX3.01 Student GuideRakesh RaddyОценок пока нет
- Lecture 6 - Manufacturing Models and MetricsДокумент14 страницLecture 6 - Manufacturing Models and Metricsjamunaa83Оценок пока нет
- Machine Vice Models and Drawings: Re. Fundamentals of Graphics Communication, Gary R. Bertoline, EtalДокумент4 страницыMachine Vice Models and Drawings: Re. Fundamentals of Graphics Communication, Gary R. Bertoline, EtalGokul Prabu100% (1)
- CI-121344 - The Pressure of Content Catalog Editor - How To Create Parts in CCE For Civil 3DДокумент30 страницCI-121344 - The Pressure of Content Catalog Editor - How To Create Parts in CCE For Civil 3DJigneshОценок пока нет
- CATIA v5 - SketcherДокумент488 страницCATIA v5 - SketcherDaniele CandelaresiОценок пока нет
- Enovia v5 Dmu-Design ReviewДокумент2 страницыEnovia v5 Dmu-Design ReviewprasannaОценок пока нет
- CATIA Lesson PlanДокумент3 страницыCATIA Lesson PlanSujit MishraОценок пока нет
- Basic Pro-E Ques and AnswerДокумент14 страницBasic Pro-E Ques and Answerapi-3808872100% (1)
- Mech Engg Syllabus Modified (R10) 11.3.2012Документ57 страницMech Engg Syllabus Modified (R10) 11.3.2012Srimanthula SrikanthОценок пока нет
- 01 BIM in BridgeDesign ThesisДокумент83 страницы01 BIM in BridgeDesign Thesismoderntalking87100% (1)
- Samsung NX Teamcenter Case StudyДокумент2 страницыSamsung NX Teamcenter Case StudySehar AdilОценок пока нет
- GpsДокумент5 страницGpstanhuyhcmutОценок пока нет
- Virtual RealityДокумент26 страницVirtual RealitySanjukta DasОценок пока нет
- Submitted and Presented By:: Nitin Arya (BT17EEE037)Документ10 страницSubmitted and Presented By:: Nitin Arya (BT17EEE037)nitin aryaОценок пока нет
- DMU Fitting Simulation PDFДокумент9 страницDMU Fitting Simulation PDFtest1Оценок пока нет
- Catia V5 QuestionsДокумент66 страницCatia V5 QuestionsBobby KiranОценок пока нет
- Mass PropertiesДокумент17 страницMass Propertiespalaniappan_pandianОценок пока нет
- Unit 2,4Документ24 страницыUnit 2,4GooftilaaAniJiraachuunkooYesusiinОценок пока нет
- Delmia IgripДокумент6 страницDelmia Igrip6toОценок пока нет
- Revit Structure and AutoCAD Feb07Документ19 страницRevit Structure and AutoCAD Feb07welwelОценок пока нет
- 3Ds Max Domino Assignment Report: Phase 1Документ8 страниц3Ds Max Domino Assignment Report: Phase 1Mortigou Richmond Oliver LabundaОценок пока нет
- Building Information ModellingДокумент13 страницBuilding Information ModellingMuhannad AbdulRaouf100% (1)
- Openroads Technology Selectseries 4 For Vdot: Bentley Institute Course GuideДокумент406 страницOpenroads Technology Selectseries 4 For Vdot: Bentley Institute Course Guidebin zhaoОценок пока нет
- Autocad Mep Product BrochureДокумент6 страницAutocad Mep Product BrochureMarkos BultoОценок пока нет
- Organizational Structure of Industry: Industrial Training Report At. Srinivasa Farms Pvt. LTDДокумент33 страницыOrganizational Structure of Industry: Industrial Training Report At. Srinivasa Farms Pvt. LTDShivam NakhateОценок пока нет
- A Presentation On: Unit VI: CAD Customization & Automation By, ByДокумент41 страницаA Presentation On: Unit VI: CAD Customization & Automation By, Byvishwajeet patilОценок пока нет
- Open BIM Protocol: Promoting Coordination Using IFC ModelsДокумент17 страницOpen BIM Protocol: Promoting Coordination Using IFC ModelsT A WiqasОценок пока нет
- Durability Assessments of Motorcycle Handlebars Ken-Yuan Lin, 2005 XXXXXДокумент25 страницDurability Assessments of Motorcycle Handlebars Ken-Yuan Lin, 2005 XXXXXjaydeepnaruleОценок пока нет
- Intro Cad Cam Cae ImpДокумент64 страницыIntro Cad Cam Cae ImpManmit SalunkeОценок пока нет
- Autodesk Inventor SyllabusДокумент7 страницAutodesk Inventor Syllabusaraz_1985Оценок пока нет
- Generative Design Essentials of Convergent Modeling Topology OptimizationДокумент10 страницGenerative Design Essentials of Convergent Modeling Topology Optimizationcad cadОценок пока нет
- Microstation Software SyllabusДокумент3 страницыMicrostation Software Syllabusapi-269727505Оценок пока нет
- Solidworks TRUCK ModellingДокумент6 страницSolidworks TRUCK ModellingGerardo AndresОценок пока нет
- Linear Regression With Excel Brief Tutorial For Forecasting AssignmentДокумент8 страницLinear Regression With Excel Brief Tutorial For Forecasting AssignmentchandanОценок пока нет
- Wireframe and Surface Design: CATIA TrainingДокумент208 страницWireframe and Surface Design: CATIA TrainingHomer Texido FrangioniОценок пока нет
- Stuffing Box PartsДокумент1 страницаStuffing Box PartsAnonymous hlRLVcMОценок пока нет
- Gears and Screw Threads PDFДокумент16 страницGears and Screw Threads PDFAnonymous hlRLVcMОценок пока нет
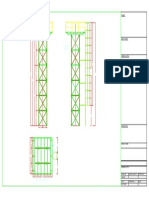
- Tank TowerДокумент1 страницаTank TowerAnonymous hlRLVcMОценок пока нет
- Internet HistoryДокумент37 страницInternet Historyzizou105Оценок пока нет
- Bench Vise Exploded ViewДокумент1 страницаBench Vise Exploded ViewAnonymous hlRLVcMОценок пока нет
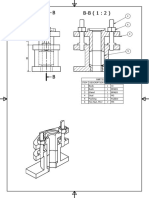
- Stuffing BoxДокумент2 страницыStuffing BoxAnonymous hlRLVcMОценок пока нет
- User 05-Jun-18: Designed by Checked by Approved by Date DateДокумент1 страницаUser 05-Jun-18: Designed by Checked by Approved by Date DateAnonymous hlRLVcMОценок пока нет
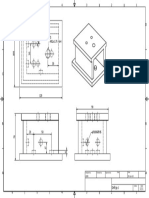
- Spray Dryer-MainДокумент1 страницаSpray Dryer-MainAnonymous hlRLVcMОценок пока нет
- Bench Vise AssemblyДокумент2 страницыBench Vise AssemblyAnonymous hlRLVcMОценок пока нет
- Friction ChartДокумент1 страницаFriction ChartAnonymous hlRLVcMОценок пока нет
- Spiral Classifier of Stable Performence - Fote MachineryДокумент15 страницSpiral Classifier of Stable Performence - Fote MachineryAnonymous hlRLVcMОценок пока нет
- DimensioningДокумент3 страницыDimensioningAnonymous hlRLVcMОценок пока нет
- 01 History of The InternetДокумент38 страниц01 History of The InternetHamada SaidОценок пока нет
- Vision 2030 Popular VersionДокумент32 страницыVision 2030 Popular VersionNjogu DennisОценок пока нет
- Fixtures Design PDFДокумент15 страницFixtures Design PDFAnonymous hlRLVcMОценок пока нет
- Engineering and The SocietyДокумент6 страницEngineering and The SocietyAnonymous hlRLVcMОценок пока нет
- Cams and LociДокумент15 страницCams and LociAnonymous hlRLVcMОценок пока нет
- Liberation of Iron From Concentrated OreДокумент1 страницаLiberation of Iron From Concentrated OreAnonymous hlRLVcMОценок пока нет
- Fixtures Design PDFДокумент15 страницFixtures Design PDFAnonymous hlRLVcMОценок пока нет
- ZW3D CAD - Fundamentals PDFДокумент300 страницZW3D CAD - Fundamentals PDFchoon yong lohОценок пока нет
- The Product Keys For Autodesk 2013 ProductsДокумент4 страницыThe Product Keys For Autodesk 2013 Productsprincedj33Оценок пока нет
- RMJM Dubai - CAD ManualДокумент0 страницRMJM Dubai - CAD ManualNhu HuynhОценок пока нет
- Morbidelli M600 M800 - Ing - 3Документ32 страницыMorbidelli M600 M800 - Ing - 3marco lopez perezОценок пока нет
- Computer Application in Construction Project ManagementДокумент58 страницComputer Application in Construction Project ManagementIan Louis Steve SantosОценок пока нет
- Factory CadДокумент2 страницыFactory CadMauricio OrtizОценок пока нет
- Arch Interview QuestionsДокумент5 страницArch Interview QuestionssuperECE100% (1)
- New Microsoft Office Word DocumentДокумент2 страницыNew Microsoft Office Word DocumentRajesh PagadalaОценок пока нет
- 2075-Assembly Manual For FFF - FDMДокумент115 страниц2075-Assembly Manual For FFF - FDMCristo LBОценок пока нет
- Getting Started With Altera DE2-70 BoardДокумент5 страницGetting Started With Altera DE2-70 BoardThanh Minh HaОценок пока нет
- Project2 3 1arbor PressДокумент9 страницProject2 3 1arbor PressLucas Marcell Flores MuñozОценок пока нет
- ConversionДокумент1 страницаConversionNumeriano FalcãoОценок пока нет
- Ace BrainДокумент2 страницыAce BrainKrupal PatelОценок пока нет
- Literature ReviewДокумент22 страницыLiterature ReviewSharon ShineОценок пока нет
- Chapter 5 - Product DesignДокумент52 страницыChapter 5 - Product DesignJonnabeth Aligui BondeОценок пока нет
- Syed Asif Hussain Shah Bukhari: Bachelors of Mechanical (Industrial & Manufacturing Engineering) F.SC Pre EngineeringДокумент1 страницаSyed Asif Hussain Shah Bukhari: Bachelors of Mechanical (Industrial & Manufacturing Engineering) F.SC Pre EngineeringRiaz KhanОценок пока нет
- The Kisssoft Interface To Pro/EngineerДокумент2 страницыThe Kisssoft Interface To Pro/EngineerAnonymous pMVR77x1Оценок пока нет
- Simulation Research On Fire Evacuation of Large Public Buildings Based On Building Information ModelingДокумент9 страницSimulation Research On Fire Evacuation of Large Public Buildings Based On Building Information ModelingLucas Adriano Maciel Dos SantosОценок пока нет
- Electrical DRWДокумент12 страницElectrical DRWbacktrxОценок пока нет
- Vectorworks 2009 User GuideДокумент846 страницVectorworks 2009 User GuideAdrian Gardner100% (3)
- ResumeДокумент4 страницыResumeAsif HussainОценок пока нет
- ChatLog BIM Digitised Version of Buildings and Infra 2020 - 06 - 21 14 - 39Документ2 страницыChatLog BIM Digitised Version of Buildings and Infra 2020 - 06 - 21 14 - 39Francis Hiro LedunaОценок пока нет
- Automating Wire Harness Design in Today's Automotive, Aerospace and Marine IndustryДокумент8 страницAutomating Wire Harness Design in Today's Automotive, Aerospace and Marine IndustryMos CraciunОценок пока нет
- Tm1tEMPLATES-SWBL-Forms 1.1-1.4 (1) (Back Up)Документ17 страницTm1tEMPLATES-SWBL-Forms 1.1-1.4 (1) (Back Up)Norrodin MangatongОценок пока нет
- 109461890Документ16 страниц109461890arminhecimovicОценок пока нет
- List of BIM Software & Providers - CAD (And BIM) AddictДокумент2 страницыList of BIM Software & Providers - CAD (And BIM) AddictemmanuelОценок пока нет
- Fundamentals of CADДокумент31 страницаFundamentals of CADsatheeshОценок пока нет
- WCB High Quality China Factory Price Tadano Crane Single Row Slewing Ring Swing BearingДокумент80 страницWCB High Quality China Factory Price Tadano Crane Single Row Slewing Ring Swing BearingWCB BEARINGОценок пока нет
- Plainfield North High School: Sophomore Class of 2023Документ2 страницыPlainfield North High School: Sophomore Class of 2023Eric RadulovichОценок пока нет