Вам также может понравиться
- Metodos AlcubierreДокумент22 страницыMetodos AlcubierreCarlos MillanОценок пока нет
- Método NuméricoДокумент50 страницMétodo NuméricoIris Sandoval RojasОценок пока нет
- Practica Ecuaciones DiferencialesДокумент10 страницPractica Ecuaciones DiferencialesRicardo Jose Montaño0% (1)
- Apuntes Metodos Numericos Sistema de Ecuaciones No LinealesДокумент30 страницApuntes Metodos Numericos Sistema de Ecuaciones No LinealesCris TurínОценок пока нет
- Tip2 - Modelo 2 MДокумент4 страницыTip2 - Modelo 2 MFórmularios PPT,PDF Y DOCSОценок пока нет
- Aiii.s1 2018-2Документ16 страницAiii.s1 2018-2Jhoan Pierre RGОценок пока нет
- A-Método de Diferencias FinitasДокумент5 страницA-Método de Diferencias FinitasY. Gabriela SchendelbekОценок пока нет
- Diferencias FinitasДокумент19 страницDiferencias FinitasCristóbal SilvaОценок пока нет
- MN Pc3 01 Sem23 2 Final SolucionДокумент4 страницыMN Pc3 01 Sem23 2 Final SolucionANDY SEBASTIAN HALANOCA FLORESОценок пока нет
- Integracion NumericaДокумент10 страницIntegracion Numericaprofe.alexОценок пока нет
- Deber 2u PDFДокумент1 страницаDeber 2u PDFnikov009Оценок пока нет
- Apuntes Ecuaciones Diferenciales TEMA 1Документ45 страницApuntes Ecuaciones Diferenciales TEMA 1uzielv48Оценок пока нет
- Sesion 1 Edo PDFДокумент7 страницSesion 1 Edo PDFABEL PUMA AYQUIОценок пока нет
- Lectura Fundamental 6 PDFДокумент25 страницLectura Fundamental 6 PDFFabianDarioMendozaОценок пока нет
- Unidad 2. Las Ecuaciones Diferenciales Primer Orden y Sus SolucionesДокумент24 страницыUnidad 2. Las Ecuaciones Diferenciales Primer Orden y Sus SolucionesAndrès Almonte PeraltaОценок пока нет
- hw5 Solns - En.esДокумент5 страницhw5 Solns - En.esNicolas Camargo RojasОценок пока нет
- Métodos Matemático 1 2Документ3 страницыMétodos Matemático 1 2Alejandro Patiño RiveroОценок пока нет
- Guia Pucp de Ecuaciones DiferencialesДокумент26 страницGuia Pucp de Ecuaciones DiferencialesMarco AntonioОценок пока нет
- ACFrOgDsc9jWcACzvs6hY7BYV6s jePMzkrb95b8q 6cG9HyWEn7kycyi5vUm2YcmtYfHqV0GfxbDmd3D8nrS3xVh JXP ACZTHlMBueduyKVmxu84lzrRSLNDsIRO4qwpF2eeIz2ui3LqBogRpOДокумент5 страницACFrOgDsc9jWcACzvs6hY7BYV6s jePMzkrb95b8q 6cG9HyWEn7kycyi5vUm2YcmtYfHqV0GfxbDmd3D8nrS3xVh JXP ACZTHlMBueduyKVmxu84lzrRSLNDsIRO4qwpF2eeIz2ui3LqBogRpONICOL YAJAIRA GONZALEZ MENESESОценок пока нет
- CursoDiferenciasFinitas Actividad 1 CompressedДокумент3 страницыCursoDiferenciasFinitas Actividad 1 CompressedWillian AlcoserОценок пока нет
- Unidad Iv Semanas 14 y 15Документ41 страницаUnidad Iv Semanas 14 y 15PRINS JEREMY VILLEGAS JULCAОценок пока нет
- Prob. Integ. Dobles AreasДокумент9 страницProb. Integ. Dobles AreasMarco Daniel CarrilloОценок пока нет
- Metodos Numericos para Ecuaciones Diferenciales OrdinariasДокумент18 страницMetodos Numericos para Ecuaciones Diferenciales Ordinariasvalezero0% (1)
- Integración NuméricaДокумент19 страницIntegración NuméricaYhan FloresОценок пока нет
- Clase 14Документ24 страницыClase 14profjnapolesОценок пока нет
- Derivada. Teoria y Ejercicios - GuiaДокумент34 страницыDerivada. Teoria y Ejercicios - GuiaJesus ToroОценок пока нет
- Integración Por Monte CarloДокумент22 страницыIntegración Por Monte CarloJobs29Оценок пока нет
- Solucion Numerica de Ecuaciones No LinealesДокумент30 страницSolucion Numerica de Ecuaciones No LinealesSergio MamaniОценок пока нет
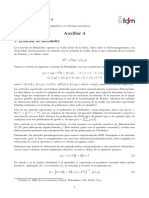
- Auxiliar 4Документ8 страницAuxiliar 4Camilo Eduardo Avilés QuintanillaОценок пока нет
- Integración NuméricaДокумент19 страницIntegración NuméricaLony P. RamirezОценок пока нет
- Taller 1Документ3 страницыTaller 1Jhon Edison Jaramillo UrregoОценок пока нет
- Cap 8. EdpevolДокумент38 страницCap 8. EdpevolDeisy monroyОценок пока нет
- Picon Gamarra Tarea01 MN IIДокумент16 страницPicon Gamarra Tarea01 MN IIPicón Gamarra Alex JuniorОценок пока нет
- EDP No-HomogéneasДокумент5 страницEDP No-HomogéneasCaro Villa MoraОценок пока нет
- Certamenes 3 (Recopilacion)Документ7 страницCertamenes 3 (Recopilacion)Miguel AguirreОценок пока нет
- TASSI - Introducción Al Método de Las Diferencias FinitasДокумент19 страницTASSI - Introducción Al Método de Las Diferencias FinitasJorge_UFCGОценок пока нет
- Parcial Calculo IntegralДокумент8 страницParcial Calculo IntegralMiguel BelloОценок пока нет
- 4 EcuacionesДокумент11 страниц4 EcuacionesIsai SeguraОценок пока нет
- Disivision de Polinomios Acade PedroДокумент4 страницыDisivision de Polinomios Acade PedroJoel Orellana LopezОценок пока нет
- Tarea 3 CVДокумент2 страницыTarea 3 CVsalvador angel aristeo cortesОценок пока нет
- S5 Diapo S7-Integración NuméricaДокумент23 страницыS5 Diapo S7-Integración NuméricaJose Angel De la Cruz100% (1)
- Introducción A Las Ecuaciones DiferencialesДокумент23 страницыIntroducción A Las Ecuaciones DiferencialesLuis BadoffОценок пока нет
- Me Todos Numericos Crank NicolsonДокумент18 страницMe Todos Numericos Crank NicolsonLuis Angeles SotoОценок пока нет
- Calculo Enero 2018 ResueltoДокумент5 страницCalculo Enero 2018 ResueltoSofiОценок пока нет
- Minimos CuadradosДокумент6 страницMinimos CuadradosIzharОценок пока нет
- Actividad Integradora Unidad DosДокумент2 страницыActividad Integradora Unidad Doscarlos robayoОценок пока нет
- 1Документ16 страниц1Carlos Alberto Silva RiosОценок пока нет
- Proyecto Numero 1 Aplicada 4 PDFДокумент11 страницProyecto Numero 1 Aplicada 4 PDFHenry De Leon AndradeОценок пока нет
- 2 Metodo de FourierДокумент72 страницы2 Metodo de FourierWilliamShauntOrendainSibriainОценок пока нет
- Proponga Cinco Ejemplos de Series Matemáticas Convergentes y Cinco Ejemplos de Series DivergentesДокумент12 страницProponga Cinco Ejemplos de Series Matemáticas Convergentes y Cinco Ejemplos de Series DivergentesFrancisco Ospina Forero100% (1)
- Listado7 IntegracionДокумент2 страницыListado7 IntegracionEternal SmileОценок пока нет
- Universidad Nacional de IngenieriaДокумент62 страницыUniversidad Nacional de IngenieriaHaxel Pelayo GarciaОценок пока нет
- La ecuación general de segundo grado en dos y tres variablesОт EverandLa ecuación general de segundo grado en dos y tres variablesОценок пока нет
- Ejercicios de Integrales y Ecuaciones Integrales-DiferencialesОт EverandEjercicios de Integrales y Ecuaciones Integrales-DiferencialesОценок пока нет
- Transformación de Hadamard: Revelando el poder de la transformación de Hadamard en visión por computadoraОт EverandTransformación de Hadamard: Revelando el poder de la transformación de Hadamard en visión por computadoraОценок пока нет
- Informe Académico N 02Документ6 страницInforme Académico N 02Victor Timana SilvaОценок пока нет
- Metodo Rigideces 4Документ9 страницMetodo Rigideces 4Victor Timana SilvaОценок пока нет
- Trabajo de InvestigaciónoldДокумент86 страницTrabajo de InvestigaciónoldVictor Timana SilvaОценок пока нет
- Como Se Proyecta Una Vivienda - Ediciones CEACДокумент87 страницComo Se Proyecta Una Vivienda - Ediciones CEACVictor Timana Silva100% (1)
- Analisis de Datos de DescargaДокумент9 страницAnalisis de Datos de DescargaVictor Timana SilvaОценок пока нет
- Sistema de Coordenadas UtmДокумент10 страницSistema de Coordenadas UtmVictor Timana SilvaОценок пока нет
- Determinacion de La Humedad de SueloДокумент8 страницDeterminacion de La Humedad de SueloVictor Timana SilvaОценок пока нет
- Poi CanchaqueДокумент12 страницPoi CanchaqueVictor Timana SilvaОценок пока нет
- Resumen de La Ley de Recursos HidricosДокумент6 страницResumen de La Ley de Recursos HidricosBraniac57% (7)
- Estrategia DesarrRural PIURARGdДокумент82 страницыEstrategia DesarrRural PIURARGdVictor Timana SilvaОценок пока нет
- Proyecto de Investigacion IME Victor Timana SilvaДокумент84 страницыProyecto de Investigacion IME Victor Timana SilvaVictor Timana Silva100% (1)
- Series de FourierДокумент12 страницSeries de FourierVictor Timana SilvaОценок пока нет
- Centrales TermicasДокумент192 страницыCentrales TermicasVictor Timana SilvaОценок пока нет
- Trabajo de PlaneamientoДокумент17 страницTrabajo de PlaneamientoVictor Timana SilvaОценок пока нет
- Situacion Actual de La Asociatividad AgrariaДокумент56 страницSituacion Actual de La Asociatividad AgrariaVictor Timana SilvaОценок пока нет
- Version Sistematización Proyecto Catamayo Chira 2012. Fanel, Carlos PDFДокумент84 страницыVersion Sistematización Proyecto Catamayo Chira 2012. Fanel, Carlos PDFVictor Timana SilvaОценок пока нет
- Plan de PracticasДокумент2 страницыPlan de PracticasVictor Timana SilvaОценок пока нет
- Semana 1 - Funciones de Varias Variables-2020-1Документ23 страницыSemana 1 - Funciones de Varias Variables-2020-1Randy Herrera Rodriguez100% (1)
- Avances en MatematicasДокумент8 страницAvances en MatematicasJavier Garcia RajoyОценок пока нет
- Prueba Funcion Lineal y AfinДокумент2 страницыPrueba Funcion Lineal y AfinAna Luisa AlvaradoОценок пока нет
- Guía Académica U1Документ5 страницGuía Académica U1Arancha Rincon AlvaradoОценок пока нет
- Tipos de Matrices y Matriz InversaДокумент14 страницTipos de Matrices y Matriz InversaYESID ACEVEDOОценок пока нет
- Trabajo de CalculoДокумент9 страницTrabajo de CalculoAlberto Josue SantiagoОценок пока нет
- Semana 8 Carlos CabreraДокумент11 страницSemana 8 Carlos Cabrerajuan cortez arredondo100% (3)
- Derivadas ParcialesДокумент18 страницDerivadas ParcialesLibardo Augusto Trigos RamirezОценок пока нет
- Ecuaciones de Tercer y Cuarto GradoДокумент6 страницEcuaciones de Tercer y Cuarto GradoJuana SanchezОценок пока нет
- Diseño de Curvas HorizontalesДокумент39 страницDiseño de Curvas HorizontalesAlvaro Andres Mego ParedesОценок пока нет
- Registros VshaleДокумент2 страницыRegistros VshaleJuan David Martinez AlonsoОценок пока нет
- Tarea2-Trabajo Colaborativo LIMITES Y CONTINUIDADДокумент39 страницTarea2-Trabajo Colaborativo LIMITES Y CONTINUIDADAngie MejiaОценок пока нет
- Expresiones Alg... El TerminoДокумент5 страницExpresiones Alg... El TerminoCamilo Lopez OrtizОценок пока нет
- Trabajo - Colaborativo - Momento - 4 Algebra Trigonometria y Geometria AnaliticaДокумент22 страницыTrabajo - Colaborativo - Momento - 4 Algebra Trigonometria y Geometria AnaliticaRolando Gutiérrez Alvarado100% (1)
- Temario de TrigonometríaДокумент1 страницаTemario de TrigonometríadgramiroОценок пока нет
- Integracion Regla Trapecioy Regla SimpsonДокумент6 страницIntegracion Regla Trapecioy Regla SimpsonJean Paul Huaynate HidalgoОценок пока нет
- Actividad2 - Álgebra Superior. Números Complejos.Документ9 страницActividad2 - Álgebra Superior. Números Complejos.Fernando Vizcarra50% (2)
- Clase 5. Medidas de DispersionДокумент11 страницClase 5. Medidas de DispersionDiana LoaizaОценок пока нет
- Ecuaciones en El Espacio Figuras Geometricas 2Документ26 страницEcuaciones en El Espacio Figuras Geometricas 2Nautilus LinkОценок пока нет
- Matrices Teoria y OperacionesДокумент7 страницMatrices Teoria y OperacionesGabrielaОценок пока нет
- Ci Cuestionario 1Документ4 страницыCi Cuestionario 1jorge alberto aguilera maciasОценок пока нет
- Mathcad - Sección VariableДокумент16 страницMathcad - Sección VariableLeonel SanchezОценок пока нет
- Capítulo 1 - CuánticaДокумент23 страницыCapítulo 1 - CuánticaChris QCОценок пока нет
- Examen Parcial 2 - (Unidad 3 Y Unidad 4)Документ14 страницExamen Parcial 2 - (Unidad 3 Y Unidad 4)elenamendieta18Оценок пока нет
- Campo de Una Linea de Carga.Документ14 страницCampo de Una Linea de Carga.Anonymous s6WXfz2Оценок пока нет
- Eiq 542 - 01Документ3 страницыEiq 542 - 01Jhonatan Carreño TorresОценок пока нет
- Progresiones Geométricas 2023Документ2 страницыProgresiones Geométricas 2023Yeremy pillacaОценок пока нет
- SistemasdeEcuaciones ParteIДокумент27 страницSistemasdeEcuaciones ParteIDiego Sebastián AranedaОценок пока нет
- .EDO Factor IntegranteДокумент23 страницы.EDO Factor IntegranteRubio Hervert Esteban OmarОценок пока нет
- Ejercicio Asignado Por Estudiante para Vídeo - Primera y Segunda Derivada - Regla de La CadenaДокумент3 страницыEjercicio Asignado Por Estudiante para Vídeo - Primera y Segunda Derivada - Regla de La Cadenabrayan reyОценок пока нет