Вам также может понравиться
- Department of CSE Department of CSEДокумент1 страницаDepartment of CSE Department of CSEVasantha KumariОценок пока нет
- Unit 4Документ30 страницUnit 4Vasantha KumariОценок пока нет
- (All India Tour Operator & Travel Agent) : Samyuktha Tours & Travels (Regd)Документ6 страниц(All India Tour Operator & Travel Agent) : Samyuktha Tours & Travels (Regd)Vasantha KumariОценок пока нет
- Data Structures and Object Oriented Programming in C++ Unit - Ii Advanced Object Oriented ProgrammingДокумент32 страницыData Structures and Object Oriented Programming in C++ Unit - Ii Advanced Object Oriented ProgrammingVasantha KumariОценок пока нет
- System Software LabДокумент63 страницыSystem Software LabVasantha KumariОценок пока нет
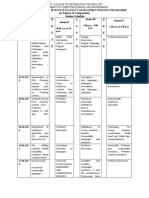
- On Theory of Computation Session Schedule B R E A K L U N C H B R E A KДокумент2 страницыOn Theory of Computation Session Schedule B R E A K L U N C H B R E A KVasantha KumariОценок пока нет
- Ec 2202 Data Structures and Object Oriented Programming in C++ Unit Iii Data Structures & Algorithms 3.1. AlgorithmДокумент36 страницEc 2202 Data Structures and Object Oriented Programming in C++ Unit Iii Data Structures & Algorithms 3.1. AlgorithmVasantha KumariОценок пока нет
- Exam Centre: Direct Recruitment To The Post of Ae Elec/ Mech/Civil Hall TicketДокумент1 страницаExam Centre: Direct Recruitment To The Post of Ae Elec/ Mech/Civil Hall TicketVasantha KumariОценок пока нет
- DB2 Associate Mock Test Time Duration: 1 Hr. 30 Min. Passing Percentage: 60Документ11 страницDB2 Associate Mock Test Time Duration: 1 Hr. 30 Min. Passing Percentage: 60Vasantha KumariОценок пока нет
- Data Structures and Object Oriented Programming in C++: Unit-IДокумент40 страницData Structures and Object Oriented Programming in C++: Unit-IVasantha KumariОценок пока нет
- C. Inserting XML Documents in An Integer ColumnДокумент19 страницC. Inserting XML Documents in An Integer ColumnVasantha KumariОценок пока нет
- Confirmation Mail (TOC)Документ3 страницыConfirmation Mail (TOC)Vasantha KumariОценок пока нет
- Ex - No:9 Paging Technic of Memory ManagementДокумент2 страницыEx - No:9 Paging Technic of Memory ManagementVasantha KumariОценок пока нет
- Ex1 &2 Commands and ShellДокумент28 страницEx1 &2 Commands and ShellVasantha KumariОценок пока нет
- Implementation of Producer-Consumer Problem Using Semaphores ProgramДокумент2 страницыImplementation of Producer-Consumer Problem Using Semaphores ProgramVasantha KumariОценок пока нет
- 15 06 24 09 43 12 3306 RajkumarДокумент40 страниц15 06 24 09 43 12 3306 RajkumarVasantha KumariОценок пока нет
- Implementation of System CallsДокумент5 страницImplementation of System CallsVasantha KumariОценок пока нет
- Implement All File Organization TechniquesДокумент12 страницImplement All File Organization TechniquesVasantha KumariОценок пока нет
- 12 File AllocationДокумент6 страниц12 File AllocationVasantha KumariОценок пока нет
- Ex3 FCFS SJF PS RRДокумент9 страницEx3 FCFS SJF PS RRVasantha KumariОценок пока нет
- Ex-6Implement Threading & Synchronization ApplicationsДокумент2 страницыEx-6Implement Threading & Synchronization ApplicationsVasantha KumariОценок пока нет
- Program: (Fifo) : 10) A) Program To Implement Fifo Page Replacement AlgorithmДокумент7 страницProgram: (Fifo) : 10) A) Program To Implement Fifo Page Replacement AlgorithmVasantha KumariОценок пока нет
- 7 .8bank and DeadlockДокумент6 страниц7 .8bank and DeadlockVasantha KumariОценок пока нет
- Unit I: 1.2 Characteristics of ComputerДокумент51 страницаUnit I: 1.2 Characteristics of ComputerVasantha KumariОценок пока нет
- Exp# 5d Shared Memory Aim: CS2257 Operating System LabДокумент4 страницыExp# 5d Shared Memory Aim: CS2257 Operating System LabVasantha KumariОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Sybsc Cs Labbook 2019cbcs Sem IVДокумент36 страницSybsc Cs Labbook 2019cbcs Sem IVPARTH VYAVHAREОценок пока нет
- Design and Analysis of Algorithms: Lab ManualДокумент57 страницDesign and Analysis of Algorithms: Lab ManualPavan SrinivasОценок пока нет
- Dynamic Programming: CSE 431/531: Algorithm Analysis and Design (Spring 2022)Документ79 страницDynamic Programming: CSE 431/531: Algorithm Analysis and Design (Spring 2022)nehruОценок пока нет
- Interview Camp: Level: Hard Sort A Graph in Topological OrderДокумент4 страницыInterview Camp: Level: Hard Sort A Graph in Topological Orderabhi74Оценок пока нет
- ADas Solution CSE101Документ20 страницADas Solution CSE101Abhishek Varshney100% (5)
- 13bs206 Discrete Mathematics Y14Документ2 страницы13bs206 Discrete Mathematics Y14koduru narayana reddyОценок пока нет
- אלגוריתמים- הרצאה 7 - Single Source Shortest Path ProblemДокумент5 страницאלגוריתמים- הרצאה 7 - Single Source Shortest Path ProblemRonОценок пока нет
- DAG and DagittiДокумент7 страницDAG and DagittiDani Yitu MedanituОценок пока нет
- Computational GraphДокумент17 страницComputational GraphRam MurthyОценок пока нет
- CS502 Solved Subjective For Final TermДокумент19 страницCS502 Solved Subjective For Final TermFATIMA AMJADОценок пока нет
- CPP LabsДокумент33 страницыCPP LabsKanimozhi Suguna100% (1)
- CS502 Fundamentals of Algorithms 2013 Final Term Questions Answers Solved With References by MoaazДокумент19 страницCS502 Fundamentals of Algorithms 2013 Final Term Questions Answers Solved With References by MoaazShahrukh Usman100% (1)
- Topological Sort HomeworkДокумент5 страницTopological Sort Homeworkabhi74Оценок пока нет
- 6 DPДокумент119 страниц6 DPRyan DolmОценок пока нет
- Flowerformer: Empowering Neural Architecture Encoding Using A Flow-Aware Graph TransformerДокумент12 страницFlowerformer: Empowering Neural Architecture Encoding Using A Flow-Aware Graph TransformerlarrylynnmailОценок пока нет
- Quiz2 3510 Cheat-SheetДокумент4 страницыQuiz2 3510 Cheat-SheetKatherine Pham100% (1)
- GraphsДокумент39 страницGraphsAtul SareenОценок пока нет
- FinalДокумент3 страницыFinal239Himraj KashyapОценок пока нет
- Algorithm Design TechniquesДокумент24 страницыAlgorithm Design TechniquespermasaОценок пока нет
- Topological Sorting: Directed Acyclic GraphДокумент22 страницыTopological Sorting: Directed Acyclic Graphmark edwardsОценок пока нет
- Data Structure Solved Q Paper From 2017 To 2019Документ180 страницData Structure Solved Q Paper From 2017 To 2019Sakshi SonavaneОценок пока нет
- ADA Lab Manual Updated 2023-24Документ38 страницADA Lab Manual Updated 2023-24mbaqari008Оценок пока нет
- Review 4: CSCI 2720: Data StructuresДокумент33 страницыReview 4: CSCI 2720: Data StructuresJohn WayneОценок пока нет
- Exercises 1.2Документ13 страницExercises 1.2Mahdi HallakОценок пока нет
- Dhamu - All Progromes Batch-1Документ60 страницDhamu - All Progromes Batch-1Dhamo DaranОценок пока нет
- Instruction Scheduling: List Scheduling, Trace Scheduling, Loop Unrolling & Software PipeliningДокумент137 страницInstruction Scheduling: List Scheduling, Trace Scheduling, Loop Unrolling & Software PipeliningДаринка ЗечевићОценок пока нет
- ConnectedcomponentsДокумент96 страницConnectedcomponentsShorya KumarОценок пока нет
- Graph (Graph DS, BFS, DFS, Prim's, Krushkal's) PDFДокумент60 страницGraph (Graph DS, BFS, DFS, Prim's, Krushkal's) PDFShivansh GoelОценок пока нет
- Notes On Graph Algorithms Used in Optimizing Compilers: Carl D. OffnerДокумент100 страницNotes On Graph Algorithms Used in Optimizing Compilers: Carl D. Offnerref denisОценок пока нет
- Top 40 Data Structure Interview Questions and Answers (2021) - InterviewBitДокумент31 страницаTop 40 Data Structure Interview Questions and Answers (2021) - InterviewBitShubham BajajОценок пока нет