Вам также может понравиться
- 9-Autovalores y AutovectoresДокумент5 страниц9-Autovalores y AutovectoresAna zelayaОценок пока нет
- Unidad I B 2022 - Matemática 3Документ9 страницUnidad I B 2022 - Matemática 3Rocio Aguirre RodriguezОценок пока нет
- Autovalores y AutovectoresДокумент5 страницAutovalores y AutovectoresloiОценок пока нет
- 9-Autovalores y AutovectoresДокумент5 страниц9-Autovalores y AutovectoresJohany PonedaОценок пока нет
- Módulo 12 - AUTOVALORES Y AUTOVECTORESДокумент24 страницыMódulo 12 - AUTOVALORES Y AUTOVECTORESALEJANDRO CARBONELLОценок пока нет
- Preguntas de RepasoДокумент6 страницPreguntas de Repasojosenoibercubasdiaz111Оценок пока нет
- Autovalores y AutovectoresДокумент4 страницыAutovalores y AutovectoresMiguel Angel Chavez VasquezОценок пока нет
- Autovalores y Autovectores PDFДокумент37 страницAutovalores y Autovectores PDFRoda RodaОценок пока нет
- Autovalores FinalДокумент42 страницыAutovalores FinalArturo BarrosОценок пока нет
- Formas Cuadráticas y Nociones de TopologíaДокумент49 страницFormas Cuadráticas y Nociones de TopologíacamilaОценок пока нет
- Autovalores y Autovectores SantyДокумент7 страницAutovalores y Autovectores Santyluigy_zОценок пока нет
- Informe FinalДокумент32 страницыInforme FinalNeil Roger Rodríguez CandiaОценок пока нет
- Clase 5aДокумент17 страницClase 5aandres pinillos alegreОценок пока нет
- de Clase Semana 13Документ29 страницde Clase Semana 13ROCAYОценок пока нет
- Semana - 13 - Valores y Vectores PropiosДокумент26 страницSemana - 13 - Valores y Vectores PropiosCarlos IntriagoОценок пока нет
- AGA Virtual Unidad 4 PDFДокумент14 страницAGA Virtual Unidad 4 PDFcarlos alberto espinal bedoyaОценок пока нет
- Ecuaciones e InecuacionesДокумент18 страницEcuaciones e InecuacionesAndres Duran CardonaОценок пока нет
- Vectores y Valores PropiosДокумент8 страницVectores y Valores PropiosIng Emisael AlarcónОценок пока нет
- ALGEBRA LINEAL EXAMEN Sol y Rub Ex Final AL PAE23Документ9 страницALGEBRA LINEAL EXAMEN Sol y Rub Ex Final AL PAE23gatoОценок пока нет
- Metodo de PòtenciasДокумент19 страницMetodo de PòtenciasL Ayquipa MerinoОценок пока нет
- C13 Valores Vectores PropiosДокумент37 страницC13 Valores Vectores PropiosGonzalo Salvador GuevaraОценок пока нет
- Autovalores AutovectoresДокумент35 страницAutovalores AutovectoresAniRiveroОценок пока нет
- de Clase Semana 13Документ29 страницde Clase Semana 13Jose Luis Talaverano NajarroОценок пока нет
- Unidad 1 - Concepto de Constante de TiempoДокумент2 страницыUnidad 1 - Concepto de Constante de TiempoBarbyModestiОценок пока нет
- MMF PropДокумент82 страницыMMF PropJuan Jose Martinez ValladaresОценок пока нет
- Ecuación y Función CuadráticaДокумент6 страницEcuación y Función CuadráticaDiego Alfonso100% (1)
- A LinealДокумент3 страницыA LinealCarla ViazzoОценок пока нет
- CI708 Unidad 3 Autovalores y Autovectores 2023 01Документ30 страницCI708 Unidad 3 Autovalores y Autovectores 2023 01Alfredo AlejandroОценок пока нет
- Modelo Examen Final Álgebra Lineal 2022 1Документ9 страницModelo Examen Final Álgebra Lineal 2022 1John Jairo MarinОценок пока нет
- ÁLGEBRA Y GEOMETRÍA II Unidad 8 Autovalores y AutovectoresДокумент44 страницыÁLGEBRA Y GEOMETRÍA II Unidad 8 Autovalores y AutovectoresFacundo ArraigadaОценок пока нет
- DVS Y APLICACIONES Algebra 2 FiubaДокумент24 страницыDVS Y APLICACIONES Algebra 2 FiubaNaiara Estefanía NaveiraОценок пока нет
- Taller Semana 13Документ12 страницTaller Semana 13NFXОценок пока нет
- Semana 01 Ecuaciones LinealesДокумент18 страницSemana 01 Ecuaciones LinealesZander Meza ChoqueОценок пока нет
- Monografía CBO-Matemática para Los NegciosДокумент25 страницMonografía CBO-Matemática para Los NegciosDavid SalinasОценок пока нет
- Semana 2Документ43 страницыSemana 2Adrian ValverdeОценок пока нет
- Analisis Informe 1234567Документ22 страницыAnalisis Informe 1234567Seba Cifuentes100% (1)
- s13 PPT Valores Propios 2020 2Документ24 страницыs13 PPT Valores Propios 2020 2Katia Ibarra AliagaОценок пока нет
- Mali2 U3 A1 AnzoДокумент7 страницMali2 U3 A1 AnzoYair ParkerОценок пока нет
- Tarea 1 Maira LindarteДокумент13 страницTarea 1 Maira LindarteFernanda LindarteОценок пока нет
- 3.3 Eigenvalores y EigenvectoresДокумент20 страниц3.3 Eigenvalores y Eigenvectoreschuy juarezОценок пока нет
- Cap Tulo 6 Lgebra EcuacionesДокумент19 страницCap Tulo 6 Lgebra EcuacionesJo LopezОценок пока нет
- Autovalores Autovectores y La Representacion de Jordan PDFДокумент26 страницAutovalores Autovectores y La Representacion de Jordan PDFDulce MartínezОценок пока нет
- Cadenas de Markov y Su Aplicación en La Ciencia ActuarialДокумент6 страницCadenas de Markov y Su Aplicación en La Ciencia ActuarialdiegoОценок пока нет
- S14 - PPT - Valores y Vectores PropiosДокумент25 страницS14 - PPT - Valores y Vectores PropiosandyОценок пока нет
- Circuito RLC. Respuesta DinamicaДокумент15 страницCircuito RLC. Respuesta DinamicaSebasОценок пока нет
- Introduccion Al Metodo de Frobenius y El Problema de Sturm-LoiuvilleДокумент29 страницIntroduccion Al Metodo de Frobenius y El Problema de Sturm-LoiuvilleHaxel P. GarciaОценок пока нет
- Matriz CuadráticaДокумент14 страницMatriz CuadráticaJewel GemОценок пока нет
- ClasesДокумент92 страницыClasesWilliam PadillaОценок пока нет
- Vectores y Vectores PropiosДокумент26 страницVectores y Vectores PropiosFrank Kleider Meza BarrientosОценок пока нет
- Trabajo Upn Version1Документ10 страницTrabajo Upn Version1Mario UzuriagaОценок пока нет
- Modulo 3 Mate 2021 Ecuaciones FinalДокумент12 страницModulo 3 Mate 2021 Ecuaciones FinalFernando FloresОценок пока нет
- Espacios VectorialesДокумент19 страницEspacios VectorialesAngie Fernanda CifuentesОценок пока нет
- Circuito TransitorioДокумент27 страницCircuito Transitoriojhon VelezОценок пока нет
- Práctica 2 SPДокумент14 страницPráctica 2 SPPedro CarreraОценок пока нет
- Ejercicios de Integrales y Ecuaciones Integrales-DiferencialesОт EverandEjercicios de Integrales y Ecuaciones Integrales-DiferencialesОценок пока нет
- Plan Estratégico Credicorp Trelles PalominoДокумент238 страницPlan Estratégico Credicorp Trelles PalominoGabriel Andres Vega AllpaccaОценок пока нет
- Expa Ge 502u, 20 1 Vega AllpaccaДокумент6 страницExpa Ge 502u, 20 1 Vega AllpaccaGabriel Andres Vega AllpaccaОценок пока нет
- Examen Parcial-te502u-Vega Allpacca Gabriel AndresДокумент5 страницExamen Parcial-te502u-Vega Allpacca Gabriel AndresGabriel Andres Vega AllpaccaОценок пока нет
- Test #05 Ge-502u, 20-1-Vega AllpaccaДокумент3 страницыTest #05 Ge-502u, 20-1-Vega AllpaccaGabriel Andres Vega AllpaccaОценок пока нет
- Pc3 Ge 502u, 20 1 Vega Allpacca Gabriel AndresДокумент6 страницPc3 Ge 502u, 20 1 Vega Allpacca Gabriel AndresGabriel Andres Vega AllpaccaОценок пока нет
- Innova Day 2019 - 7mo Grado B - 2 - 122656790Документ21 страницаInnova Day 2019 - 7mo Grado B - 2 - 122656790Gabriel Andres Vega AllpaccaОценок пока нет
- Problema 3 y 4Документ11 страницProblema 3 y 4Gabriel Andres Vega AllpaccaОценок пока нет
- Comunicado N-4 Consideraciones para El Inicio Escolar 20-1-161949502Документ2 страницыComunicado N-4 Consideraciones para El Inicio Escolar 20-1-161949502Gabriel Andres Vega AllpaccaОценок пока нет
- Comunicado N-3 Protocolo de Entrada y Salida 2019-1-11422477Документ6 страницComunicado N-3 Protocolo de Entrada y Salida 2019-1-11422477Gabriel Andres Vega Allpacca100% (1)
- Innova Day 2019 - 7mo Grado B - 2 - 122656790Документ21 страницаInnova Day 2019 - 7mo Grado B - 2 - 122656790Gabriel Andres Vega AllpaccaОценок пока нет
- Informaci211n de Salida Del Estudiante - 1 - 1421992Документ2 страницыInformaci211n de Salida Del Estudiante - 1 - 1421992Gabriel Andres Vega AllpaccaОценок пока нет
- 1 Labo FQДокумент33 страницы1 Labo FQGabriel Andres Vega AllpaccaОценок пока нет
- Deducción Sistemas Ácidos MonoproticosДокумент2 страницыDeducción Sistemas Ácidos MonoproticosGloria Alejandra MéndezОценок пока нет
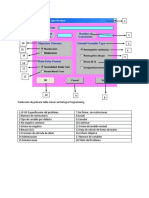
- Algoritmos en PSeIntДокумент19 страницAlgoritmos en PSeIntrash270% (2)
- Modelo Bote de BasuraДокумент3 страницыModelo Bote de BasuraYazmin SolorzanoОценок пока нет
- Solucion Actividad 1 4Документ8 страницSolucion Actividad 1 4Jose gregorio GuerraОценок пока нет
- Presaber Unidad 3Документ3 страницыPresaber Unidad 3Maikol Rodriguez VegaОценок пока нет
- Parcial 2 - Física Mecánica 2021-2 - Revisión Del IntentoДокумент4 страницыParcial 2 - Física Mecánica 2021-2 - Revisión Del IntentoMARIA ANDREA HERNANDEZ ARIASОценок пока нет
- Formulario Mat 207Документ1 страницаFormulario Mat 207bY qMcОценок пока нет
- Planificación 3 Matemática Unidad 1Документ3 страницыPlanificación 3 Matemática Unidad 1Isabel Margarita Maldonado GonzálezОценок пока нет
- Reporte de Práctica 2 Estudio Del Trabajo 2Документ9 страницReporte de Práctica 2 Estudio Del Trabajo 2Marce De LeónОценок пока нет
- Rectificación A Reflujo TotalДокумент25 страницRectificación A Reflujo TotalSandra PatriciaОценок пока нет
- Guía+de+LДокумент69 страницGuía+de+LChris SoilworkОценок пока нет
- I O-InglesДокумент7 страницI O-Inglesrikardo_riko_1Оценок пока нет
- Ejercicios de Calculo ComputalizadoДокумент2 страницыEjercicios de Calculo ComputalizadoBEIMAR PEÑA FUENTESОценок пока нет
- Evaluación Proyecto y Quiz Econometría Básica 2019Документ3 страницыEvaluación Proyecto y Quiz Econometría Básica 2019Jose Pablo Serrano OconitrilloОценок пока нет
- Variables ProposicionalesДокумент2 страницыVariables ProposicionalesMarcia CОценок пока нет
- Termistores y LdrsДокумент19 страницTermistores y LdrsLuis Eduardo Huerta MéndezОценок пока нет
- Tema 4 Vectores en Los Espacios Bi y TriДокумент10 страницTema 4 Vectores en Los Espacios Bi y TriValero JuanОценок пока нет
- Función Logarítmica: Momento de ExploraciónДокумент6 страницFunción Logarítmica: Momento de ExploraciónEdwin Rene Rueda VillarОценок пока нет
- Resumen Astm C 128Документ9 страницResumen Astm C 128Edwar Denis0% (2)
- Ficha 1 DivisibilidadДокумент6 страницFicha 1 DivisibilidadelenitamateОценок пока нет
- Taller 2 ResueltoДокумент17 страницTaller 2 ResueltoLUIS CUELLARОценок пока нет
- Analisis de PrecioДокумент36 страницAnalisis de PrecioJuan SalinasОценок пока нет
- Constant - El Principio de La DesorientacionДокумент1 страницаConstant - El Principio de La DesorientacionpatodptОценок пока нет
- Teoria de ColasДокумент34 страницыTeoria de Colassergiomanuel221Оценок пока нет
- Derivadas en EconomiaДокумент5 страницDerivadas en Economiajhojana1660% (5)
- Tarea 5 Investigacionoperativa IДокумент3 страницыTarea 5 Investigacionoperativa IGenesis Mera0% (1)
- Programación Lineal (Segundo)Документ45 страницProgramación Lineal (Segundo)ANTONY EUGENIO DONIS ALVAREZОценок пока нет
- TFG Ignacio Erik Kleinman RuizДокумент75 страницTFG Ignacio Erik Kleinman RuizIsaias M. GonzálezОценок пока нет
- Lab 6 PDSДокумент6 страницLab 6 PDSmis_apuntesОценок пока нет
- Hidrologia Parte 6Документ7 страницHidrologia Parte 6Yohan HerreraОценок пока нет