Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Batteries and InvertersДокумент16 страницBatteries and InvertersPratik VasagadekarОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
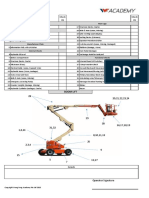
- Boomlift Inspection ChecklistДокумент1 страницаBoomlift Inspection ChecklistdennisjuntakОценок пока нет
- Rexeoth Control Panel BF-1Документ4 страницыRexeoth Control Panel BF-1Hrvoje ŠkaricaОценок пока нет
- Microsemi PolarFire FPGA JESD204B Interface Demo Guide DG0755 V9Документ35 страницMicrosemi PolarFire FPGA JESD204B Interface Demo Guide DG0755 V9Ivan Vera de los SantosОценок пока нет
- Foot Impulse Sealer ManualДокумент6 страницFoot Impulse Sealer ManualMike PandeyОценок пока нет
- APC 200 FaultsДокумент6 страницAPC 200 Faultseddie216650% (2)
- Aironet 2602i Access Point AIRCAP2602IAK9Документ38 страницAironet 2602i Access Point AIRCAP2602IAK9Ignacio Ortega ClaudeОценок пока нет
- Samsung MAX-DS750 PDFДокумент38 страницSamsung MAX-DS750 PDFboroda2410100% (1)
- Ficha Técnica Control de Alarmas y Dispositivos de EmergenciaДокумент33 страницыFicha Técnica Control de Alarmas y Dispositivos de EmergenciaLuis Garcia MartinezОценок пока нет
- Manual Yamaha Ls9 32Документ290 страницManual Yamaha Ls9 32Laura Viviana Aguilar EspinozaОценок пока нет
- Final Exam 20162017 Sem 1 SolutionДокумент16 страницFinal Exam 20162017 Sem 1 Solutiongdd ddОценок пока нет
- AMPSEAL Automotive Plug Assemblies 776268-, 776273-, 770680-, and 776164Документ2 страницыAMPSEAL Automotive Plug Assemblies 776268-, 776273-, 770680-, and 776164Андрей9Оценок пока нет
- BU 1 Plumbing (1) Online ReviewerДокумент5 страницBU 1 Plumbing (1) Online ReviewerIan UntalanОценок пока нет
- A OY UX: Service Manual Service Manual Service Manual Service ManualДокумент29 страницA OY UX: Service Manual Service Manual Service Manual Service ManualFreddy RiveraОценок пока нет
- Detection of Incipient Faults in DistributionДокумент9 страницDetection of Incipient Faults in DistributionSahiba MirzaОценок пока нет
- Thyristors, Triacs, DiacsДокумент5 страницThyristors, Triacs, DiacsAnonymous n50GmJОценок пока нет
- EM2 - Final - Lecture 06AДокумент16 страницEM2 - Final - Lecture 06AShoaib KhanОценок пока нет
- Pressure MeasurementДокумент41 страницаPressure MeasurementBlowndudeОценок пока нет
- LDF2-50 Product SpecificationsДокумент4 страницыLDF2-50 Product SpecificationsAnonymous cDWQYsjd9Оценок пока нет
- DANFOSS 300 Dt300 en Md03a402Документ28 страницDANFOSS 300 Dt300 en Md03a402viewwareОценок пока нет
- A Low-Cost Extendable Framework For Embedded Smart Car Security SystemДокумент17 страницA Low-Cost Extendable Framework For Embedded Smart Car Security Systemumaprakash111Оценок пока нет
- Student Training Guide - Radio and Transponders - Ver 1.1Документ25 страницStudent Training Guide - Radio and Transponders - Ver 1.1Batza BatsakisОценок пока нет
- Product Data: Fx4D Comfortt Series Fan Coil Sizes 019 Thru 061Документ16 страницProduct Data: Fx4D Comfortt Series Fan Coil Sizes 019 Thru 061Victor OrtegaОценок пока нет
- Os D201Документ92 страницыOs D201jacmgmorgan100% (1)
- HKE Supply Guide - 2011Документ264 страницыHKE Supply Guide - 2011Stanley SoОценок пока нет
- RM3100 Breakout Board Sales SheetДокумент2 страницыRM3100 Breakout Board Sales Sheetkostya_4524Оценок пока нет
- Ep3050 SMДокумент551 страницаEp3050 SMadjustmentОценок пока нет
- Price ListДокумент118 страницPrice ListHemant GuptaОценок пока нет
- Nyy 1CДокумент1 страницаNyy 1Chenry_gtОценок пока нет
- Saniflo Sanitop Installation GuideДокумент9 страницSaniflo Sanitop Installation GuideSmoKingBuds HD (SKB)Оценок пока нет