Вам также может понравиться
- CPSC 201 01 (F16)Документ2 страницыCPSC 201 01 (F16)BrianОценок пока нет
- 01 Formulations For The TSP With AMPLДокумент21 страница01 Formulations For The TSP With AMPLFernando Elizalde RamirezОценок пока нет
- 6 Mixed-Integer Linear Programming PDFДокумент18 страниц6 Mixed-Integer Linear Programming PDFAugusto De La Cruz CamayoОценок пока нет
- MotivationДокумент2 страницыMotivationRem IvaskОценок пока нет
- Significant Rules of Calculus in Information TechnologyДокумент2 страницыSignificant Rules of Calculus in Information TechnologyJeipy Diaz100% (1)
- Importance of Math in ProgrammingДокумент2 страницыImportance of Math in ProgrammingWill NgoОценок пока нет
- About Coders (New Version)Документ147 страницAbout Coders (New Version)geekandpoke100% (1)
- CCNA3 Study GuideДокумент42 страницыCCNA3 Study Guidesoma45100% (1)
- CCNA 3 Practice Final Answered 100%Документ16 страницCCNA 3 Practice Final Answered 100%BlueDwarf100% (3)
- CCNA Routing & Switching 200-120 Exam Q&AДокумент16 страницCCNA Routing & Switching 200-120 Exam Q&AZack Carter100% (2)
- Python 2 Lab SolutionДокумент2 страницыPython 2 Lab SolutionJohn EdokawabataОценок пока нет
- TSP Problem in AMPLДокумент33 страницыTSP Problem in AMPLujjawalbhojawalaОценок пока нет
- What Is Computer ScienceДокумент2 страницыWhat Is Computer Sciencebiodunofyankees2000Оценок пока нет
- Mixed Integer Linear Programming and Mixed Nonlinear Programming ProblemsДокумент11 страницMixed Integer Linear Programming and Mixed Nonlinear Programming ProblemsMichele VietriОценок пока нет
- A Comparative Study of Mixed-Integer Linear Programming and Genetic Algorithms For Solving Binary ProblemsДокумент5 страницA Comparative Study of Mixed-Integer Linear Programming and Genetic Algorithms For Solving Binary Problems1. b3Оценок пока нет
- Linear Programming: A Concise History and OverviewДокумент8 страницLinear Programming: A Concise History and OverviewjspinsightОценок пока нет
- Reynoso Meza2011Документ6 страницReynoso Meza2011Ankit PrajapatiОценок пока нет
- Convex Optimization With Abstract Linear OperatorsДокумент9 страницConvex Optimization With Abstract Linear OperatorsjohanОценок пока нет
- Model-Free RL for Minimal-Cost Variance ControlДокумент6 страницModel-Free RL for Minimal-Cost Variance ControlVrushabh DongeОценок пока нет
- Design Optimization of Distribution Transformers Based On Mixed Integer Programming MethodologyДокумент6 страницDesign Optimization of Distribution Transformers Based On Mixed Integer Programming Methodologyold flameОценок пока нет
- A New Computer Oriented Technique To Solve Sum of Ratios Non-Linear Fractional Programming ProblemsДокумент6 страницA New Computer Oriented Technique To Solve Sum of Ratios Non-Linear Fractional Programming ProblemsiirОценок пока нет
- Optimal Control Lecture 28: Indirect Solution MethodsДокумент2 страницыOptimal Control Lecture 28: Indirect Solution MethodsAmir ghasemiОценок пока нет
- Sparse Identification of Polynomial Models and Its Application To Nonlinear MPC ?Документ6 страницSparse Identification of Polynomial Models and Its Application To Nonlinear MPC ?Andres HernandezОценок пока нет
- Mathematical Optimization: Keywords and Notation KeyДокумент62 страницыMathematical Optimization: Keywords and Notation KeyM Khahfi ZuhandaОценок пока нет
- Computational Fluid DynamicsДокумент22 страницыComputational Fluid DynamicsSYED HASANОценок пока нет
- A New Algorithm For Solving Linear Programming ProblemsДокумент6 страницA New Algorithm For Solving Linear Programming ProblemsNATALIA ARIAS REYESОценок пока нет
- Research Article: Tree-Based Backtracking Orthogonal Matching Pursuit For Sparse Signal ReconstructionДокумент9 страницResearch Article: Tree-Based Backtracking Orthogonal Matching Pursuit For Sparse Signal ReconstructionAnonymous 9Tu1hLnwE8Оценок пока нет
- Xperm: Fast Index Canonicalization For Tensor Computer AlgebraДокумент16 страницXperm: Fast Index Canonicalization For Tensor Computer Algebraseppi05Оценок пока нет
- An Improved Evolutionary Programming Algorithm For Fuzzy Programming Problems and Its ApplicationДокумент4 страницыAn Improved Evolutionary Programming Algorithm For Fuzzy Programming Problems and Its ApplicationIzz DanialОценок пока нет
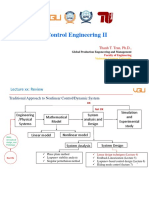
- Control Engineering II: Thanh T. Tran, PH.D.Документ36 страницControl Engineering II: Thanh T. Tran, PH.D.Thiên BùiОценок пока нет
- GL (XL (1) : I (Xi') ............. orДокумент8 страницGL (XL (1) : I (Xi') ............. orjuan LuisОценок пока нет
- Rasouli 2016Документ5 страницRasouli 2016ekupovina.djordjevic.mil87Оценок пока нет
- Agarwal, Snavely, Seitzfast Algorithms - 2008 - Fast Algorithms For L-Inf Problems in Multiview Geometry-AnnotatedДокумент8 страницAgarwal, Snavely, Seitzfast Algorithms - 2008 - Fast Algorithms For L-Inf Problems in Multiview Geometry-AnnotatedjlyОценок пока нет
- MCPLIB: A Collection of Nonlinear Mixed Complementarity ProblemsДокумент28 страницMCPLIB: A Collection of Nonlinear Mixed Complementarity ProblemsWilmer SanchezОценок пока нет
- Module 1 - Chapter 1 - Introduction To Numerical Methods and AnalysisДокумент8 страницModule 1 - Chapter 1 - Introduction To Numerical Methods and AnalysisRyan A. RamosОценок пока нет
- Constrained Optimization Problem Solving Using Estimation of Distribution AlgorithmsДокумент7 страницConstrained Optimization Problem Solving Using Estimation of Distribution AlgorithmsMo yousriОценок пока нет
- Matrix Power ComputationBand Toeplitz StructureДокумент5 страницMatrix Power ComputationBand Toeplitz StructureiirОценок пока нет
- Adobe Scan 10 Jul 2023 1Документ23 страницыAdobe Scan 10 Jul 2023 1RoshanОценок пока нет
- Chapter 1 Introduction To Numerical Method 1Документ32 страницыChapter 1 Introduction To Numerical Method 1Rohan sharmaОценок пока нет
- Optimal Capacitor Placement Using Deterministic and Genetic AlgorithmsДокумент6 страницOptimal Capacitor Placement Using Deterministic and Genetic AlgorithmsJorge CarrionОценок пока нет
- Luis A. Montestruque, P. J. Antsaklis 2003 2005 Quantization in Model Based Networked Control SystemsДокумент6 страницLuis A. Montestruque, P. J. Antsaklis 2003 2005 Quantization in Model Based Networked Control SystemsFelix GamarraОценок пока нет
- P-3.1.4 - PcaДокумент44 страницыP-3.1.4 - PcaAnkit ChaurasiyaОценок пока нет
- Adjustment of Automatic Capacitors Using Parametric Optimal FlowДокумент8 страницAdjustment of Automatic Capacitors Using Parametric Optimal Flowdiogo_dahlkeОценок пока нет
- Transmission Line Modeling For Real-Time Simulations: Maria Isabel Silva Lafaia SimõesДокумент8 страницTransmission Line Modeling For Real-Time Simulations: Maria Isabel Silva Lafaia SimõesjacquelineuniОценок пока нет
- Implementation of The Hilber-Hughes-Taylor Method in The Context of Index 3 Differential-Algebraic Equations of Multibody DynamicsДокумент13 страницImplementation of The Hilber-Hughes-Taylor Method in The Context of Index 3 Differential-Algebraic Equations of Multibody Dynamics广岩 魏Оценок пока нет
- Modal Synthesis Analysis Using Craig-Bampton Methodin An Object Oriented ApproachДокумент3 страницыModal Synthesis Analysis Using Craig-Bampton Methodin An Object Oriented ApproachMr. S. Thiyagu Asst Prof MECHОценок пока нет
- DSP Lab Experiments ListДокумент28 страницDSP Lab Experiments Listankitabhishek56Оценок пока нет
- Algoritmo HbbaДокумент11 страницAlgoritmo HbbaDocente Fede TecnologicoОценок пока нет
- MATLAB ODE Suite for Solving Ordinary Differential EquationsДокумент35 страницMATLAB ODE Suite for Solving Ordinary Differential EquationsMisael RamírezОценок пока нет
- Linear Programming IN MATRIX FORMДокумент37 страницLinear Programming IN MATRIX FORMEsteban EroОценок пока нет
- Dadush 2020Документ14 страницDadush 2020IHLIHLОценок пока нет
- Course Title: Credit Units: Course Code: ELEC403: Annexure CD - 01'Документ4 страницыCourse Title: Credit Units: Course Code: ELEC403: Annexure CD - 01'asad khanОценок пока нет
- IpppppДокумент8 страницIpppppMath DepartmentОценок пока нет
- Question 1 (Linear Regression)Документ18 страницQuestion 1 (Linear Regression)Salton GerardОценок пока нет
- Ajassp 2012 851 857Документ7 страницAjassp 2012 851 857MongiBESBESОценок пока нет
- Reif Pan 1985Документ10 страницReif Pan 1985asddsaОценок пока нет
- Simulation of Phasor Measurement Unit (PMU) in MATLAB: January 2015Документ5 страницSimulation of Phasor Measurement Unit (PMU) in MATLAB: January 2015Rajesh GangwarОценок пока нет
- CNC Design For PCB MachiningДокумент4 страницыCNC Design For PCB MachiningHarshana RandheeraОценок пока нет
- Mathematical Description of Physical Phenomena: The Finite Volume Method in Computational Fluid DynamicsДокумент26 страницMathematical Description of Physical Phenomena: The Finite Volume Method in Computational Fluid DynamicsHemant KuralkarОценок пока нет
- Program Generation For Small-Scale Linear Algebra ApplicationsДокумент13 страницProgram Generation For Small-Scale Linear Algebra ApplicationsLaoapaОценок пока нет
- CH 7Документ33 страницыCH 7Nestor Ricardo Chigne TrellesОценок пока нет
- DiscoverMath Voyage Act04 PDFДокумент8 страницDiscoverMath Voyage Act04 PDFNestor Ricardo Chigne TrellesОценок пока нет
- 2014 Annual Report and 10-KДокумент134 страницы2014 Annual Report and 10-KAlvin TanОценок пока нет
- 6th Central Pay Commission Salary CalculatorДокумент15 страниц6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- March 17, 2016 Strathmore TimesДокумент24 страницыMarch 17, 2016 Strathmore TimesStrathmore TimesОценок пока нет
- Grade 9 Unit 1 - Part 1: Square RootsДокумент20 страницGrade 9 Unit 1 - Part 1: Square RootsWilson ZhangОценок пока нет
- ASSIGNMENTДокумент10 страницASSIGNMENTKoleen Lopez ÜОценок пока нет
- Spectrophotometric Determination of Triclosan Based On Diazotization Reaction: Response Surface Optimization Using Box - Behnken DesignДокумент1 страницаSpectrophotometric Determination of Triclosan Based On Diazotization Reaction: Response Surface Optimization Using Box - Behnken DesignFitra NugrahaОценок пока нет
- Lisa - Add New Front: Process Matching/Installation and Qualification (IQ)Документ62 страницыLisa - Add New Front: Process Matching/Installation and Qualification (IQ)Thanh Vũ NguyễnОценок пока нет
- Xoro Hrs 8540 HD Sat ReceiverДокумент33 страницыXoro Hrs 8540 HD Sat ReceiverPinoОценок пока нет
- Electrolyte Turns On The Solar Cell: 2009 Project SummaryДокумент1 страницаElectrolyte Turns On The Solar Cell: 2009 Project SummaryAshu SarasОценок пока нет
- Cambridge International AS & A Level: Mathematics 9709/13Документ20 страницCambridge International AS & A Level: Mathematics 9709/13Justin OngОценок пока нет
- BC230XL Literature 12-11 SpreadslrДокумент5 страницBC230XL Literature 12-11 SpreadslrCiprian Petrule0% (1)
- Name: Amir Bin Rossaifuddin Id: 2016307153 Group: Emd2M2AДокумент2 страницыName: Amir Bin Rossaifuddin Id: 2016307153 Group: Emd2M2AamirossaifuddinОценок пока нет
- Lea 2 PDFДокумент21 страницаLea 2 PDFKY Renz100% (1)
- Lock Out Tag Out ProceduresДокумент9 страницLock Out Tag Out ProceduresyawarhassanОценок пока нет
- Adobe Scan 12 Aug 2022Документ3 страницыAdobe Scan 12 Aug 2022surabhi kalitaОценок пока нет
- CSSBI Tablas de Carga Perfiles PDFДокумент60 страницCSSBI Tablas de Carga Perfiles PDFRamón RocaОценок пока нет
- Ben Wilkins PRISON MADNESS and LOVE LETTERS: THE LOST ARTДокумент5 страницBen Wilkins PRISON MADNESS and LOVE LETTERS: THE LOST ARTBarbara BergmannОценок пока нет
- Improving Students' Science Process SkillsДокумент9 страницImproving Students' Science Process SkillsNovia RahmawatiОценок пока нет
- Technical Data Speedmaster CX 104Документ2 страницыTechnical Data Speedmaster CX 104Vinh Lê HữuОценок пока нет
- Gas Exchange in Plants and AnimalsДокумент7 страницGas Exchange in Plants and AnimalsMarvin MelisОценок пока нет
- DA1 Learning - Ans KeyДокумент4 страницыDA1 Learning - Ans KeyDolon DasОценок пока нет
- WIP CaseStudyДокумент3 страницыWIP CaseStudypaul porrasОценок пока нет
- Indo American Journal of Pharmaceutical Research (India)Документ4 страницыIndo American Journal of Pharmaceutical Research (India)Pharmacy2011journalsОценок пока нет
- MS-MS Analysis Programs - 2012 SlidesДокумент14 страницMS-MS Analysis Programs - 2012 SlidesJovanderson JacksonОценок пока нет
- Vectors FoundationДокумент8 страницVectors FoundationNaning RarasОценок пока нет
- Unit-I EsДокумент53 страницыUnit-I Eschethan.naik24Оценок пока нет
- Prob Stats Module 4 2Документ80 страницProb Stats Module 4 2AMRIT RANJANОценок пока нет
- CV of Shaila (Me)Документ4 страницыCV of Shaila (Me)Masud RanaОценок пока нет
- Moral Theories: Presented By: Sedrick M. MallariДокумент27 страницMoral Theories: Presented By: Sedrick M. MallariAlyssa De PaduaОценок пока нет
- Shiva Home - DCFДокумент2 страницыShiva Home - DCFshyamsundar_ceОценок пока нет
- Operational Transconductance Amplifier ThesisДокумент6 страницOperational Transconductance Amplifier ThesislaurahallportlandОценок пока нет
- LearnEnglish Video Zone How These Women Changed Science ForeverДокумент3 страницыLearnEnglish Video Zone How These Women Changed Science ForeverDaniella MensatoОценок пока нет