Вам также может понравиться
- Ductility and Ultimate Strength of Eccentric Braced Frame: AbstractДокумент7 страницDuctility and Ultimate Strength of Eccentric Braced Frame: AbstractAmy VinehouseОценок пока нет
- Paper 16Документ13 страницPaper 16nenad lazicОценок пока нет
- Utf-8''13 1609Документ13 страницUtf-8''13 1609nvngonОценок пока нет
- Column - Beam Connection PDFДокумент16 страницColumn - Beam Connection PDFTpHoОценок пока нет
- Seismic Behaviour of RC Exterior Wide Beam-Column Joints: S.H. Luk and J.S. KuangДокумент10 страницSeismic Behaviour of RC Exterior Wide Beam-Column Joints: S.H. Luk and J.S. KuangkyleОценок пока нет
- Size Effect in Concrete StructuresДокумент28 страницSize Effect in Concrete StructureslifeadventureОценок пока нет
- Reinforced Concrete Curved Beams in Literature: IOP Conference Series: Materials Science and EngineeringДокумент11 страницReinforced Concrete Curved Beams in Literature: IOP Conference Series: Materials Science and EngineeringDam HoangОценок пока нет
- Structural Steelwork EurocodesДокумент11 страницStructural Steelwork Eurocodessofronije2005Оценок пока нет
- Moment RedistributionДокумент8 страницMoment RedistributionfreddielistoОценок пока нет
- Beam With HingeДокумент10 страницBeam With HingeAnonymous Voi2G6Оценок пока нет
- Experimental and Numerical Study On Softening and Pinching Effects of Reinforced Concrete FrameДокумент5 страницExperimental and Numerical Study On Softening and Pinching Effects of Reinforced Concrete FrameIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalОценок пока нет
- Elongation of Plastic Hinges in Ductile RC Members: Model DevelopmentДокумент12 страницElongation of Plastic Hinges in Ductile RC Members: Model DevelopmentshuangyaksaОценок пока нет
- 2007 - 8PCEE - Peng Et Al - Response of RC Plastic HingeДокумент9 страниц2007 - 8PCEE - Peng Et Al - Response of RC Plastic HingeIonescu StefanОценок пока нет
- A Study of R.C.C. Beam-Column Connection Subjected To PDFДокумент7 страницA Study of R.C.C. Beam-Column Connection Subjected To PDFInternational Journal of Research in Engineering and TechnologyОценок пока нет
- Nonlinear Analysis of RC Beams Based On Moment-Curvature RelationДокумент14 страницNonlinear Analysis of RC Beams Based On Moment-Curvature RelationSamia ChowdhuryОценок пока нет
- Composite Structures 2 PDFДокумент29 страницComposite Structures 2 PDFsvnОценок пока нет
- Analytical Approach To The Measured Deformation Characteristics of R/C Shear WallsДокумент14 страницAnalytical Approach To The Measured Deformation Characteristics of R/C Shear WallsRick HunterОценок пока нет
- Performance-Based Seismic Design of Reinforced Concrete Beam-Column Joints, Zhongguo GuanДокумент6 страницPerformance-Based Seismic Design of Reinforced Concrete Beam-Column Joints, Zhongguo GuanQurrain MirОценок пока нет
- Osofero 2015Документ27 страницOsofero 2015HichamHiraОценок пока нет
- Lecture 10.4.1: Continuous Beams I: Objective/ScopeДокумент17 страницLecture 10.4.1: Continuous Beams I: Objective/ScopeeseckinОценок пока нет
- Research in Redistribution of Bending Moments in The Beams of Reinforced Concrete Early LoadedДокумент8 страницResearch in Redistribution of Bending Moments in The Beams of Reinforced Concrete Early LoadedfghfОценок пока нет
- An Incursion On Punching of Reinforced Concrete Flat SlabsДокумент10 страницAn Incursion On Punching of Reinforced Concrete Flat Slabsszilard88Оценок пока нет
- Numerical Study of Reinforced Concrete Beam Subjected To Blast Loading Using Finite Element Package ABAQUSДокумент4 страницыNumerical Study of Reinforced Concrete Beam Subjected To Blast Loading Using Finite Element Package ABAQUSJangdiniОценок пока нет
- Seismic Collapse Behaviour of Damaged Dams: 13 World Conference On Earthquake EngineeringДокумент15 страницSeismic Collapse Behaviour of Damaged Dams: 13 World Conference On Earthquake EngineeringPaulo ZwierzikowskiОценок пока нет
- Explicit Modeling of Damping of A Single-Layer Latticed Dome With Isolation System (Zhang, Et Al. 2014)Документ12 страницExplicit Modeling of Damping of A Single-Layer Latticed Dome With Isolation System (Zhang, Et Al. 2014)Jose ManuelОценок пока нет
- 11 CT 2 - 2019Документ11 страниц11 CT 2 - 2019Miguel FernándezОценок пока нет
- Behaviour of Beam-Column Joint Under Cyclic LoadingДокумент3 страницыBehaviour of Beam-Column Joint Under Cyclic LoadingInternational Journal of Research in Engineering and TechnologyОценок пока нет
- Fracture, Fatigue, Failure and Damage Evolution, Volume 3Документ6 страницFracture, Fatigue, Failure and Damage Evolution, Volume 3Ali FahemОценок пока нет
- Some Contributions of Physical and Numerical Modelling To The Assessment of Existing Masonry Infilled RC Frames Under Extreme LoadingДокумент10 страницSome Contributions of Physical and Numerical Modelling To The Assessment of Existing Masonry Infilled RC Frames Under Extreme LoadingRick HunterОценок пока нет
- Response Analysis of Curved Bridge With Unseating Failure Control System Under Near-Fault Ground MotionsДокумент8 страницResponse Analysis of Curved Bridge With Unseating Failure Control System Under Near-Fault Ground MotionsdarealboyОценок пока нет
- Effect of Differential Creep and Shrinkage On Prestressed Composite Concrete SectionsДокумент15 страницEffect of Differential Creep and Shrinkage On Prestressed Composite Concrete SectionsThomas WilsonОценок пока нет
- EQ Analyis PDFДокумент26 страницEQ Analyis PDFBridgy mcbridgeОценок пока нет
- Seismic Analysis of Bridge Structures: BasicsДокумент26 страницSeismic Analysis of Bridge Structures: BasicsRitesh KumarОценок пока нет
- Analytical Approach of Tension Stiffening Contribution of GFRP-MembersДокумент8 страницAnalytical Approach of Tension Stiffening Contribution of GFRP-MembersTigon Vo NgocОценок пока нет
- Lienhard - Considerations On The Scaling of Bending-Active StructuresДокумент14 страницLienhard - Considerations On The Scaling of Bending-Active StructuresAndres Felipe Perez MarinОценок пока нет
- Response of Out-Of-Plumb Structures in Earthquake: T. Masuno, G.A. Macrae & V.K. SadashivaДокумент6 страницResponse of Out-Of-Plumb Structures in Earthquake: T. Masuno, G.A. Macrae & V.K. SadashivaMagdy BakryОценок пока нет
- Displacement SpectraДокумент33 страницыDisplacement SpectraGyorgy AdrienneОценок пока нет
- Effect of Reinforcement On The Failure Load of RC Beams: Osama Salem, Arafa El-HellotyДокумент16 страницEffect of Reinforcement On The Failure Load of RC Beams: Osama Salem, Arafa El-HellotyHesham EdressОценок пока нет
- JL-98-November-December Restraint Moments in Precast Prestressed Concrete Continuous BridgesДокумент18 страницJL-98-November-December Restraint Moments in Precast Prestressed Concrete Continuous Bridgesjrobert123321Оценок пока нет
- Epjconf Dymat2018 02038Документ6 страницEpjconf Dymat2018 02038sanjusamsonОценок пока нет
- Concrete Shear-Friction Material Properties: Derivation From Actively Confined Compression Cylinder TestsДокумент38 страницConcrete Shear-Friction Material Properties: Derivation From Actively Confined Compression Cylinder TestsAdefi AbiogaОценок пока нет
- Yaser Mozaffari Jouybari, Abbas Akbarpour NikghalbДокумент8 страницYaser Mozaffari Jouybari, Abbas Akbarpour NikghalbBasil Baby-PisharathuОценок пока нет
- Comportarea Elementelor Din Beton Armat R PascuДокумент12 страницComportarea Elementelor Din Beton Armat R PascuGrigore11Оценок пока нет
- Non-Linear Numerical Modelling of A Post-Tensioned Timber Frame Building With Dissipative Steel Angle DevicesДокумент12 страницNon-Linear Numerical Modelling of A Post-Tensioned Timber Frame Building With Dissipative Steel Angle DevicesRK MEHTAОценок пока нет
- Dhakal ArtigoДокумент28 страницDhakal ArtigoMelo PereiraОценок пока нет
- Umair (Rough Proposal)Документ11 страницUmair (Rough Proposal)Sumair AhmadОценок пока нет
- Chavhan Et Al - Correlation of Static and Dynamic Modulus of Elasticity For Different SCC Mixes - 2015Документ6 страницChavhan Et Al - Correlation of Static and Dynamic Modulus of Elasticity For Different SCC Mixes - 2015MILL3482Оценок пока нет
- HysteresisModels OTANIДокумент57 страницHysteresisModels OTANImancas50Оценок пока нет
- BAM ReportДокумент74 страницыBAM ReportAlex RastyОценок пока нет
- 16 - Chapter 6 PDFДокумент39 страниц16 - Chapter 6 PDFDipankar NathОценок пока нет
- 16 - Chapter 6 PDFДокумент39 страниц16 - Chapter 6 PDFKoustav MajumdarОценок пока нет
- Chapter-6 Structural Analysis Methods/design Approaches, Assumptions and Approximations For Practical Life Line StructureДокумент39 страницChapter-6 Structural Analysis Methods/design Approaches, Assumptions and Approximations For Practical Life Line StructurenОценок пока нет
- Coneccion Ansys DisipadorДокумент8 страницConeccion Ansys DisipadorHectoreRodriguezlОценок пока нет
- VV FE Study Bridge Deck DesignДокумент22 страницыVV FE Study Bridge Deck DesignMahfuzur RahmanОценок пока нет
- ZM 212350359Документ10 страницZM 212350359AJER JOURNALОценок пока нет
- Content Server 4Документ9 страницContent Server 4zensantosОценок пока нет
- Extended AbstractДокумент10 страницExtended AbstractRohan ReddyОценок пока нет
- Orientation and LoadingДокумент2 страницыOrientation and LoadingsatyamОценок пока нет
- PHD: Credit Seminar Report: Experimental Control and Dynamics of Shake TableДокумент4 страницыPHD: Credit Seminar Report: Experimental Control and Dynamics of Shake TablesatyamОценок пока нет
- Damage Limit of MasonaryДокумент2 страницыDamage Limit of MasonarysatyamОценок пока нет
- Lab 3Документ30 страницLab 3satyamОценок пока нет
- Open Sees WorkshopДокумент305 страницOpen Sees Workshopsatyam100% (1)
- Assignment 1 CE-627: Structural Design LabДокумент1 страницаAssignment 1 CE-627: Structural Design LabsatyamОценок пока нет
- Etabs Tutorial 1Документ15 страницEtabs Tutorial 1satyamОценок пока нет
- Table 1: Coefficients of Fourier SeriesДокумент3 страницыTable 1: Coefficients of Fourier SeriessatyamОценок пока нет
- SatyamДокумент1 страницаSatyamsatyamОценок пока нет
- Assignment 1 Ce627: Structure Design Lab: Satyam Kumar PHD, Roll: 164046010 Indian Institute of Technology, BombayДокумент32 страницыAssignment 1 Ce627: Structure Design Lab: Satyam Kumar PHD, Roll: 164046010 Indian Institute of Technology, BombaysatyamОценок пока нет
- Open Sees 1Документ1 страницаOpen Sees 1satyamОценок пока нет
- Open Sees 2Документ1 страницаOpen Sees 2satyamОценок пока нет
- Fourier Series: Periodic PhenomenaДокумент3 страницыFourier Series: Periodic PhenomenasatyamОценок пока нет
- Concepts of Fatigue SafetyДокумент4 страницыConcepts of Fatigue SafetysatyamОценок пока нет
- Fabinaci SeriesДокумент1 страницаFabinaci SeriessatyamОценок пока нет
- Xmax 10 Sum 0 Numlist 1:xmax Sum Sum + Numlist Disp (Sum)Документ1 страницаXmax 10 Sum 0 Numlist 1:xmax Sum Sum + Numlist Disp (Sum)satyamОценок пока нет
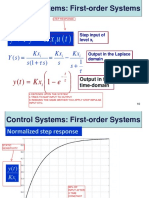
- Control Systems: First-Order Systems: y y KxutДокумент59 страницControl Systems: First-Order Systems: y y KxutsatyamОценок пока нет
- Classification of ControllersДокумент2 страницыClassification of ControllerssatyamОценок пока нет
- Bridge Term Paper - 164046010Документ9 страницBridge Term Paper - 164046010satyamОценок пока нет
- Math - Module 1Документ7 страницMath - Module 1Carlos PadillaОценок пока нет
- Mathematical StudiesДокумент3 страницыMathematical StudiesEddy R. VélezОценок пока нет
- Power System State EstimationДокумент13 страницPower System State Estimationchoban1984100% (1)
- Worlds-GDP-predection Using Machine LearningДокумент9 страницWorlds-GDP-predection Using Machine LearningChung NguyenОценок пока нет
- Stata ExcelДокумент44 страницыStata ExcelchompoonootОценок пока нет
- Lisp ProgramsДокумент4 страницыLisp ProgramsAjit MoreОценок пока нет
- אלגוריתמים- הרצאה 7 - Single Source Shortest Path ProblemДокумент5 страницאלגוריתמים- הרצאה 7 - Single Source Shortest Path ProblemRonОценок пока нет
- Spe 184865 MSДокумент30 страницSpe 184865 MSSSОценок пока нет
- Control and Optimization of A Multiple Effect EvaporatorДокумент6 страницControl and Optimization of A Multiple Effect EvaporatorthanhndbОценок пока нет
- FEM Modeling Project: Evaluation of A Steel Pulley-and-Shaft DesignДокумент4 страницыFEM Modeling Project: Evaluation of A Steel Pulley-and-Shaft DesignMuhammad Hussain BilalОценок пока нет
- GUIA de BibliometrixДокумент62 страницыGUIA de BibliometrixrobinsonortizsierraОценок пока нет
- WhatsNew 2016 en PDFДокумент54 страницыWhatsNew 2016 en PDFMiguel CbОценок пока нет
- An Evaluation of Working Capital Management An OverviewДокумент7 страницAn Evaluation of Working Capital Management An OverviewInternational Journal of Advanced Scientific Research and DevelopmentОценок пока нет
- Measures of DispersionДокумент45 страницMeasures of DispersionAmir SadeeqОценок пока нет
- (ASTM International) Manual On Presentation of DataДокумент116 страниц(ASTM International) Manual On Presentation of DataJuan Ros100% (1)
- Menu Driven Program in Java Simple CalculatorДокумент3 страницыMenu Driven Program in Java Simple CalculatorBasudeb PurkaitОценок пока нет
- 01 - Dispersion of A Free Non-Buoyant Fluid JetДокумент5 страниц01 - Dispersion of A Free Non-Buoyant Fluid JetJoren HuernoОценок пока нет
- Uber Test SearchingДокумент3 страницыUber Test SearchingRoffianto Adi Nugroho33% (3)
- Multiple Choice RotationДокумент20 страницMultiple Choice RotationJohnathan BrownОценок пока нет
- Uco Bank Form Iepf 1Документ437 страницUco Bank Form Iepf 1sandip_exlОценок пока нет
- Introduction Robotics Lecture1 PDFДокумент41 страницаIntroduction Robotics Lecture1 PDFrajavel777Оценок пока нет
- 08.607 Microcontroller Lab ManualДокумент115 страниц08.607 Microcontroller Lab ManualAssini Hussain100% (12)
- EM11Документ17 страницEM11Jerry LedesmaОценок пока нет
- Chapter 3: Basic of Applied Mechanical MeasurementДокумент112 страницChapter 3: Basic of Applied Mechanical MeasurementSajid ShaikhОценок пока нет
- Introduction To Aerospace PropulsionДокумент11 страницIntroduction To Aerospace PropulsionmgskumarОценок пока нет
- NCV2 Mathematics Hands-On Training 2010 Syllabus - Sample ChapterДокумент56 страницNCV2 Mathematics Hands-On Training 2010 Syllabus - Sample ChapterFuture Managers Pty Ltd75% (4)
- Tables For Cas Exam Mas-IiДокумент18 страницTables For Cas Exam Mas-IiPhat LocОценок пока нет
- Classes and Objects in R ProgrammingДокумент25 страницClasses and Objects in R ProgrammingDisha KhuranaОценок пока нет
- Mathematics 3Документ142 страницыMathematics 3fafaОценок пока нет
- Multivariable Calculus With Vectors: Hartley Rogers, JRДокумент10 страницMultivariable Calculus With Vectors: Hartley Rogers, JRKshama Singhal0% (1)