Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Studiul Grafecelor Forex Dupa Ora Zilnica EUROДокумент2 страницыStudiul Grafecelor Forex Dupa Ora Zilnica EURODaniel SergheencoОценок пока нет
- Royal Fa Mily: The BritishДокумент8 страницRoyal Fa Mily: The BritishDaniel SergheencoОценок пока нет
- FreeDoge Coin ScriptДокумент2 страницыFreeDoge Coin ScriptDaniel Sergheenco38% (26)
- FreeDoge Coin ScriptДокумент2 страницыFreeDoge Coin ScriptDaniel Sergheenco38% (26)
- Program Ex 7 Pag 125 Informatica 11Документ2 страницыProgram Ex 7 Pag 125 Informatica 11Daniel Sergheenco100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Silumin Catalogo Lutec PVP 2021Документ186 страницSilumin Catalogo Lutec PVP 2021VEMATELОценок пока нет
- YaRrr BookДокумент247 страницYaRrr BookBaalaji RavichandranОценок пока нет
- ASERS-LSTM: Arabic Speech Emotion Recognition System Based On LSTM ModelДокумент9 страницASERS-LSTM: Arabic Speech Emotion Recognition System Based On LSTM ModelsipijОценок пока нет
- Lab 1 Introduction To ERDASДокумент7 страницLab 1 Introduction To ERDASm4isarahОценок пока нет
- Sony SLV Ex5 Ex8s Ex9sДокумент71 страницаSony SLV Ex5 Ex8s Ex9svideoson100% (1)
- Chapter Seven Capacitors and InductorsДокумент10 страницChapter Seven Capacitors and InductorsVimala ElumalaiОценок пока нет
- Api Reference Guide PDFДокумент440 страницApi Reference Guide PDFpriyank31Оценок пока нет
- TMA4215 Report (10056,10047,10023)Документ5 страницTMA4215 Report (10056,10047,10023)EvacuolОценок пока нет
- Online Discussion: Enhancing Students' Critical Thinking SkillsДокумент8 страницOnline Discussion: Enhancing Students' Critical Thinking SkillsThiba KrishnanОценок пока нет
- Shunt Capacitor Bank Applications Protection FundamentalsДокумент32 страницыShunt Capacitor Bank Applications Protection Fundamentalsganesamoorthy1987Оценок пока нет
- 3d Password For More Secure AuthenticationДокумент7 страниц3d Password For More Secure AuthenticationRukshana MeeranОценок пока нет
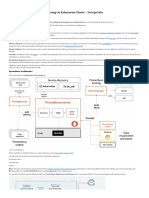
- Setup Prometheus Monitoring On KubernetesДокумент6 страницSetup Prometheus Monitoring On KubernetesAymenОценок пока нет
- Predicting The Stock Market Using Machine Learning and Deep Learning PDFДокумент58 страницPredicting The Stock Market Using Machine Learning and Deep Learning PDFPrakash PokhrelОценок пока нет
- Systems Engineering: Designing, Implementing, Deploying and Operating Systems Which Include Hardware, Software and PeopleДокумент47 страницSystems Engineering: Designing, Implementing, Deploying and Operating Systems Which Include Hardware, Software and Peoplebilal ahmadОценок пока нет
- A10 Thunder Vlan Bridging + VRRPДокумент328 страницA10 Thunder Vlan Bridging + VRRPWaldino TurraОценок пока нет
- Fea Question With Class Notes and Formula BookДокумент375 страницFea Question With Class Notes and Formula BookAshok Kumar Rajendran96% (117)
- DL7400 MaintenanceManualДокумент157 страницDL7400 MaintenanceManualIgor221987100% (1)
- C2 Logarithms & Exponential Functions 3 QPДокумент3 страницыC2 Logarithms & Exponential Functions 3 QPMa JaniceОценок пока нет
- Grammar & Spelling Check: CCNA 1 (v5.1 + v6.0) Chapter 1 Exam Answers 2017 - 100% FullДокумент9 страницGrammar & Spelling Check: CCNA 1 (v5.1 + v6.0) Chapter 1 Exam Answers 2017 - 100% FullewmbtrakОценок пока нет
- Workflow Performance, Timeouts and Load ReductionДокумент22 страницыWorkflow Performance, Timeouts and Load ReductionRafa Castaño RodriguezОценок пока нет
- Unit-IV: D Ans CДокумент8 страницUnit-IV: D Ans CAakash PundhirОценок пока нет
- SUG541 - Advanced Photogrammetry - Steps Involved in Using Stereo Aerial Triangulation SoftwareДокумент22 страницыSUG541 - Advanced Photogrammetry - Steps Involved in Using Stereo Aerial Triangulation Softwaremruzainimf100% (1)
- KVT-516 - Owners Manual - EnglishДокумент100 страницKVT-516 - Owners Manual - EnglishgmwesleyОценок пока нет
- Aralin 1 - Dangal Sa PaggawaДокумент27 страницAralin 1 - Dangal Sa PaggawaPupung MartinezОценок пока нет
- SX44Документ4 страницыSX44Mk MakyОценок пока нет
- L .. Eee - .: Distribution Voltage RegulatorsДокумент11 страницL .. Eee - .: Distribution Voltage RegulatorsSirajulОценок пока нет
- Cx93010-2X Ucmxx: Usb V.92/V.34/V.32Bis Controllered Modem With Cx20548 SmartdaaДокумент62 страницыCx93010-2X Ucmxx: Usb V.92/V.34/V.32Bis Controllered Modem With Cx20548 SmartdaaInquiryОценок пока нет
- 111810052013121634Документ3 страницы111810052013121634Rohan Bahri100% (1)
- Intelligent Addressable Fire Alarm System: GeneralДокумент10 страницIntelligent Addressable Fire Alarm System: Generaleduardo gonzalezavОценок пока нет