Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- ISO9001-2015 Quality Management System Assessment ChecklistДокумент37 страницISO9001-2015 Quality Management System Assessment ChecklistAbrahamNdewingoОценок пока нет
- Guide OshaДокумент18 страницGuide OshaAbrahamNdewingo100% (1)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- NMAP Detection and CountermeasuresДокумент12 страницNMAP Detection and CountermeasuresKhanbalamОценок пока нет
- Ginger The JiraffeДокумент16 страницGinger The JiraffeFechete Lavinia100% (1)
- Networker Command Line ExamplesДокумент6 страницNetworker Command Line ExamplesShefali MishraОценок пока нет
- Maturity Model For Data GovernanceДокумент4 страницыMaturity Model For Data GovernanceAbrahamNdewingo100% (1)
- Google HackingДокумент156 страницGoogle HackingSarthak PranitОценок пока нет
- Compressed Air Quality - RENNERДокумент16 страницCompressed Air Quality - RENNERAbrahamNdewingo100% (1)
- 2G-3G Core To LTE EPC Interworking TWPДокумент16 страниц2G-3G Core To LTE EPC Interworking TWPHiew KfОценок пока нет
- Industry 4.0 - Self AssessmentДокумент6 страницIndustry 4.0 - Self AssessmentAbrahamNdewingoОценок пока нет
- FlutterДокумент2 страницыFlutterjuniormj1Оценок пока нет
- Computer Engineering Mcqs PDFДокумент2 страницыComputer Engineering Mcqs PDFVivek Pandey0% (1)
- L Series Manual 2020Документ16 страницL Series Manual 2020AbrahamNdewingoОценок пока нет
- Design and Prototyping of A Low-Cost Portable Mechanical VentilatorДокумент10 страницDesign and Prototyping of A Low-Cost Portable Mechanical VentilatorAbrahamNdewingoОценок пока нет
- Attendance Policy and Management: Annual ReviewДокумент5 страницAttendance Policy and Management: Annual ReviewAbrahamNdewingoОценок пока нет
- Implementation of 5S in Manufacturing Industry A CДокумент5 страницImplementation of 5S in Manufacturing Industry A CAbrahamNdewingoОценок пока нет
- WEPS04 Wireless Pressure Module v1.3 PDFДокумент4 страницыWEPS04 Wireless Pressure Module v1.3 PDFAbrahamNdewingoОценок пока нет
- Guide OrganizedWorkplace PDFДокумент24 страницыGuide OrganizedWorkplace PDFAbrahamNdewingoОценок пока нет
- Tree Swallow BirdsДокумент3 страницыTree Swallow BirdsAbrahamNdewingoОценок пока нет
- Notes:: Sunday Monday Tuesday Wednesda Y Thursday Friday SaturdayДокумент1 страницаNotes:: Sunday Monday Tuesday Wednesda Y Thursday Friday SaturdayAbrahamNdewingoОценок пока нет
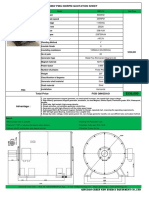
- 5mw 200rpm PMG GreefДокумент2 страницы5mw 200rpm PMG GreefAbrahamNdewingoОценок пока нет
- 5MW 200RPM PMG - Greef PDFДокумент2 страницы5MW 200RPM PMG - Greef PDFAbrahamNdewingoОценок пока нет
- Modbus FAQДокумент5 страницModbus FAQspoof183Оценок пока нет
- Firesheep Sidejacking PDFДокумент5 страницFiresheep Sidejacking PDFBoy GautamaОценок пока нет
- Ga m68m s2p ManualДокумент88 страницGa m68m s2p ManualSuzanne FernandoОценок пока нет
- How To Detect Ransomware With FileAudit - Enterprise Network Security Blog From ISDecisionsДокумент4 страницыHow To Detect Ransomware With FileAudit - Enterprise Network Security Blog From ISDecisionsAjay DhamijaОценок пока нет
- Submit Interpreter: SoftwareДокумент16 страницSubmit Interpreter: SoftwareNick RivieraОценок пока нет
- Base Celular G36Документ2 страницыBase Celular G36Magaly ContrerasОценок пока нет
- Open GL Project 6th Sem Hawk Eye by NasarДокумент19 страницOpen GL Project 6th Sem Hawk Eye by Nasarnasar_the_max75% (4)
- HJGHJGДокумент205 страницHJGHJGtrsghstrhsОценок пока нет
- Advance Concept in Data Bases Unit-3 by Arun Pratap SinghДокумент81 страницаAdvance Concept in Data Bases Unit-3 by Arun Pratap SinghArunPratapSingh100% (2)
- Digital Data ProcessingДокумент3 страницыDigital Data ProcessingMd Kutubuddin SardarОценок пока нет
- Tcs - Rim Alliance - Tcs BRMS' - FinalДокумент34 страницыTcs - Rim Alliance - Tcs BRMS' - Finalsiddhartha_maity_4Оценок пока нет
- D845GLVA ProductGuide EnglishДокумент72 страницыD845GLVA ProductGuide EnglishjaijakОценок пока нет
- HotSpotWeb User ManualДокумент34 страницыHotSpotWeb User ManualmemedelarosaОценок пока нет
- CP SSL NetworkExtender R71 HFA1 ReleasenotesДокумент5 страницCP SSL NetworkExtender R71 HFA1 ReleasenotesJohan ScottОценок пока нет
- Brochure EleДокумент2 страницыBrochure EleVimarsh SrivastavaОценок пока нет
- ITNE231 & ITCE314 CH#1 Part OneДокумент12 страницITNE231 & ITCE314 CH#1 Part OnehambleОценок пока нет
- Aerospace and Electronic SystemsДокумент121 страницаAerospace and Electronic SystemsShahrzad GhasemiОценок пока нет
- MIS Case StudyДокумент32 страницыMIS Case StudyRokibul HasanОценок пока нет
- Symbols, Instances, and The LibraryДокумент2 страницыSymbols, Instances, and The LibraryZed DeguzmanОценок пока нет
- Mike Nelson Resume 2008Документ2 страницыMike Nelson Resume 2008api-12184182Оценок пока нет
- Fortisandbox v3.0.5 Release NotesДокумент14 страницFortisandbox v3.0.5 Release Notes5trangerОценок пока нет
- Using ExmonДокумент14 страницUsing ExmonOscar MezaОценок пока нет
- (Updated) Rajan Microprocessor Lab Manual-1 (16!11!2012)Документ113 страниц(Updated) Rajan Microprocessor Lab Manual-1 (16!11!2012)Thiagu RajivОценок пока нет
- Symmetrix 5000 Enterprise Storage SystemsДокумент4 страницыSymmetrix 5000 Enterprise Storage SystemsBillcОценок пока нет