Вам также может понравиться
- Armónicas en Sistemas Eléctricos IndustrialesОт EverandArmónicas en Sistemas Eléctricos IndustrialesРейтинг: 4.5 из 5 звезд4.5/5 (12)
- Clase 3 ASP2 Generador Sincrónico - Voltajes Internos Transitorios y SubtransitoriosДокумент31 страницаClase 3 ASP2 Generador Sincrónico - Voltajes Internos Transitorios y Subtransitoriosjulian cepedaОценок пока нет
- Filtros PasivosДокумент80 страницFiltros PasivosSebas Alvarez FloresОценок пока нет
- Ejercicios 1a. Evaluación-1Документ3 страницыEjercicios 1a. Evaluación-1Alondra GRОценок пока нет
- Corriente AlternaДокумент36 страницCorriente AlternaOrlando Mandujano67% (3)
- Semana 2.S1 - Impedancias2Документ14 страницSemana 2.S1 - Impedancias2Jose ZizoldОценок пока нет
- 00195640954IM06S2109766001 - Transformadores 26 36Документ11 страниц00195640954IM06S2109766001 - Transformadores 26 36Daniel SarmientoОценок пока нет
- Apuntes MAQUINAS SINCRONAДокумент10 страницApuntes MAQUINAS SINCRONAFernando Huentecura TapiaОценок пока нет
- Maquinasasincronas 131210154034 Phpapp02Документ36 страницMaquinasasincronas 131210154034 Phpapp02Isrrael SaraguroОценок пока нет
- Boletín Ejercicios UD4Документ2 страницыBoletín Ejercicios UD4wintry FacenhordОценок пока нет
- ELI-271 - Clase #17 - TransformadoresДокумент35 страницELI-271 - Clase #17 - TransformadoresMartin LeonОценок пока нет
- p2CIRCUITOS PUENTES Y SENSORESp2Документ11 страницp2CIRCUITOS PUENTES Y SENSORESp2Mauricio VegaОценок пока нет
- Informe Precion Lab 5Документ4 страницыInforme Precion Lab 5Aldair Vargas LunaОценок пока нет
- Circuito Serie Rl. RC, RLCДокумент35 страницCircuito Serie Rl. RC, RLCAbelardo Zcarias CardenasОценок пока нет
- Maquina Sincrona en Estado TransitorioДокумент15 страницMaquina Sincrona en Estado TransitoriobrinnerОценок пока нет
- Tercer Parcial (2016-01)Документ4 страницыTercer Parcial (2016-01)CIELO SOFIA GARCIA MERAОценок пока нет
- Fuentes CC No Reg UNQ 2015Документ39 страницFuentes CC No Reg UNQ 2015Erick MoralesОценок пока нет
- MT3 - Turbomáquinas TérmicasДокумент33 страницыMT3 - Turbomáquinas TérmicasRommel Nina floresОценок пока нет
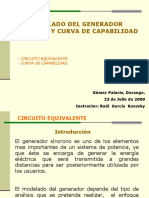
- Modelado Del Generador Síncrono y Curva de CapabilidadДокумент14 страницModelado Del Generador Síncrono y Curva de CapabilidadNajar10Оценок пока нет
- Corriente AlternaДокумент36 страницCorriente AlternaJUAN PABLO BRAYAN CORNEJO TELLEZОценок пока нет
- Unidad Corriente Alterna FasoresДокумент57 страницUnidad Corriente Alterna FasoresManu-l CseОценок пока нет
- Ejercicio Am OpДокумент2 страницыEjercicio Am OpMiguel GuerreroОценок пока нет
- MIT - Regulacion de VelocidadДокумент10 страницMIT - Regulacion de VelocidadFFFFОценок пока нет
- Formulario de ElectricidadДокумент1 страницаFormulario de ElectricidadFelipe Hdez LopezОценок пока нет
- Circuitos Serie-Paralelo RLC en CAДокумент65 страницCircuitos Serie-Paralelo RLC en CARaúl MamaniОценок пока нет
- Cto Equivalente Motor de InducciónДокумент11 страницCto Equivalente Motor de InducciónBrayan Saavedra QuiselОценок пока нет
- 3.problemas Tema 1Документ15 страниц3.problemas Tema 1CarlosОценок пока нет
- Resolución de Circuitos en Corriente ContinuaДокумент14 страницResolución de Circuitos en Corriente Continuamusicavariadavol2Оценок пока нет
- Maquinas ElectricasДокумент23 страницыMaquinas ElectricasJorel LopezОценок пока нет
- Exp2b PDFДокумент6 страницExp2b PDFJosuéChavarríaFОценок пока нет
- Presentacion Máquinas AsíncronasДокумент27 страницPresentacion Máquinas AsíncronasSamuel RodríguezОценок пока нет
- ..... Corriente AlternaДокумент35 страниц..... Corriente Alternalissbeth Macedo izquierdoОценок пока нет
- Ley de Ohm - Pre Informe 2 (Tatiana Rodríguez Gómez)Документ5 страницLey de Ohm - Pre Informe 2 (Tatiana Rodríguez Gómez)Tatiana Rodriguez GomezОценок пока нет
- Practica 4 Resonancia ParaleloДокумент3 страницыPractica 4 Resonancia Paralelohenry Palma SanchesОценок пока нет
- Onda Senoidal 20202Документ60 страницOnda Senoidal 20202ana maria valencia estupinanОценок пока нет
- Fallas Simetricas Ud IДокумент41 страницаFallas Simetricas Ud IDenis MelendezОценок пока нет
- Semana13 ElementosRLyCenCAДокумент21 страницаSemana13 ElementosRLyCenCARicardo VladimirОценок пока нет
- Curso Trafos T5 Transformador en Corto - 02 - 2014 PDFДокумент35 страницCurso Trafos T5 Transformador en Corto - 02 - 2014 PDFjonescaiОценок пока нет
- Arranque de Motores AsincronosДокумент16 страницArranque de Motores AsincronosLeonardo PerezОценок пока нет
- 8.5 Mesa Oscilante de Maquinado VIRTUALДокумент5 страниц8.5 Mesa Oscilante de Maquinado VIRTUALGARY GABRIEL RAMOS PASTRANAОценок пока нет
- Circuito RLC SerieДокумент25 страницCircuito RLC SeriejesusОценок пока нет
- Generac I On OndasДокумент28 страницGenerac I On OndasMaxi El capoОценок пока нет
- 2022 Tiristores-40.0Документ39 страниц2022 Tiristores-40.0javier montillaОценок пока нет
- Respuesta en Frecuencia Del Amplificador en Base ComúnДокумент7 страницRespuesta en Frecuencia Del Amplificador en Base Comúnjohan ortiz ortegaОценок пока нет
- Clase 2Документ31 страницаClase 2edwarddanielrvilОценок пока нет
- 4.0 Transitorios en Líneas de Transmisión Con Compensación Serie Capacitiva e Inductiva en ParaleloДокумент21 страница4.0 Transitorios en Líneas de Transmisión Con Compensación Serie Capacitiva e Inductiva en ParaleloBruce VegaОценок пока нет
- Tema - 5 - Funcionamiento Bajo Carga PDFДокумент18 страницTema - 5 - Funcionamiento Bajo Carga PDFCharly Garcia VelascoОценок пока нет
- Saber Electronica 014Документ74 страницыSaber Electronica 014sborgo92100% (3)
- TEOREMAS de Electricidad en AC.Документ19 страницTEOREMAS de Electricidad en AC.Juan Carlos Abarca SereñoОценок пока нет
- Solucionario Segundo Parcial PDFДокумент7 страницSolucionario Segundo Parcial PDFRodrigo SalinasОценок пока нет
- La-Maquina-Asincrona Tema 2Документ21 страницаLa-Maquina-Asincrona Tema 2Aldo David Silva MartinezОценок пока нет
- Guia Circuitos en SerieДокумент8 страницGuia Circuitos en SerieIsaias VillarrealОценок пока нет
- Iea 2013 4Документ28 страницIea 2013 4aerubio76Оценок пока нет
- 8-11 Servomecanismo Con Motor de Corriente DirectaДокумент3 страницы8-11 Servomecanismo Con Motor de Corriente DirectaGARY GABRIEL RAMOS PASTRANAОценок пока нет
- Cap 6Документ16 страницCap 6Kevin RomeroОценок пока нет
- Ejercicios Propuestos Tema1Документ4 страницыEjercicios Propuestos Tema1Ricardo TorresОценок пока нет
- Curso Trafos T5 Transformador en Corto - 02 - 2013 PDFДокумент35 страницCurso Trafos T5 Transformador en Corto - 02 - 2013 PDFNICOLÁS MARÍN SAAVEDRAОценок пока нет
- CorrinetalternapracticaДокумент8 страницCorrinetalternapracticaSantiagoRamosОценок пока нет
- Molde de SuculentasДокумент10 страницMolde de SuculentasRoxana Mtz DE La OОценок пока нет
- Banderin Club America RolaДокумент3 страницыBanderin Club America RolaRoxana Mtz DE La OОценок пока нет
- Análisis de Ultra SonidoДокумент8 страницAnálisis de Ultra SonidoRoxana Mtz DE La OОценок пока нет
- Ejemplos de TeoriasДокумент6 страницEjemplos de TeoriasRoxana Mtz DE La OОценок пока нет
- Fundamentos de IluminacionДокумент9 страницFundamentos de IluminacionRoxana Mtz DE La OОценок пока нет
- Polimeros Fotonicos y AutoorganizablesДокумент7 страницPolimeros Fotonicos y AutoorganizablesRoxana Mtz DE La O100% (1)
- Ejercicios Selección de BombasДокумент11 страницEjercicios Selección de BombasRoxana Mtz DE La OОценок пока нет
- Teoría Del Esfuerzo Cortante MáximoДокумент10 страницTeoría Del Esfuerzo Cortante MáximoRoxana Mtz DE La OОценок пока нет
- Diagrama de Flujo de Selección de Bombas CentrífugasДокумент1 страницаDiagrama de Flujo de Selección de Bombas CentrífugasRoxana Mtz DE La O50% (4)
- Equipo 10Документ15 страницEquipo 10Roxana Mtz DE La OОценок пока нет
- Texto TematicoДокумент4 страницыTexto TematicoRoxana Mtz DE La OОценок пока нет
- Problemario Ui 10Документ1 страницаProblemario Ui 10Roxana Mtz DE La OОценок пока нет
- Anexos Dibujo TecnicoДокумент220 страницAnexos Dibujo TecnicoRoxana Mtz DE La OОценок пока нет
- Investigación de OperacionesДокумент59 страницInvestigación de OperacionesCarlosmabОценок пока нет
- Reporte 1Документ4 страницыReporte 1Jacobo GuzmanОценок пока нет
- Relationships Between Sedation Knowledge and Nurse Practice Competences in Intensive Care Unit - ZH-CN - EsДокумент11 страницRelationships Between Sedation Knowledge and Nurse Practice Competences in Intensive Care Unit - ZH-CN - EsLesly Gonzales AОценок пока нет
- Colegio Tecnologico Digitales Comerciales TDC (Recuperado Automáticamente)Документ12 страницColegio Tecnologico Digitales Comerciales TDC (Recuperado Automáticamente)cris rojasОценок пока нет
- Colangitis AgudaДокумент22 страницыColangitis Agudajuan pedroОценок пока нет
- CUMPLIMIENTO DE INFORME TRIMESTRAL FabioДокумент9 страницCUMPLIMIENTO DE INFORME TRIMESTRAL FabioRoderck YatoОценок пока нет
- Proyecto Transversal HumanidadesДокумент40 страницProyecto Transversal HumanidadesDiana Liliana Martinez JimenezОценок пока нет
- 00 Informe General Pip Al Ii Trim 2020Документ40 страниц00 Informe General Pip Al Ii Trim 2020CARTRE XОценок пока нет
- Lenición de Obstruyentes Intervocálicas en EspañolДокумент14 страницLenición de Obstruyentes Intervocálicas en EspañolJosephAffonsoОценок пока нет
- EstructuralДокумент7 страницEstructuralJose Luis Huancollo GoyzuetaОценок пока нет
- Criterio de Diseño para InvernaderoДокумент12 страницCriterio de Diseño para InvernaderoYeltsin Perez PradoОценок пока нет
- 3 Testigos de Jehova - La AtalayaДокумент1 страница3 Testigos de Jehova - La AtalayaAlex Iván Gallardo FaríasОценок пока нет
- 07 +Rousseau+y+CondorcetДокумент7 страниц07 +Rousseau+y+CondorcetnanoОценок пока нет
- RespetoДокумент3 страницыRespetoAnnette RecinosОценок пока нет
- Presentación de Tesis.Документ43 страницыPresentación de Tesis.carmen espinozaОценок пока нет
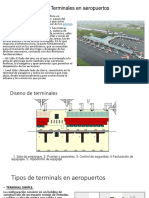
- Terminales en AeropuertosДокумент6 страницTerminales en AeropuertosMagda Sarai DiazОценок пока нет
- Mapa Conceptual Areas Del Desarrollo Por EvaluarДокумент4 страницыMapa Conceptual Areas Del Desarrollo Por EvaluarAngel DanielОценок пока нет
- Balance 3Документ7 страницBalance 3Aykel PazmiñoОценок пока нет
- Andres David Barrero Barbosa-Libertad de Conciencia y Libertad ReligiosaДокумент4 страницыAndres David Barrero Barbosa-Libertad de Conciencia y Libertad ReligiosagigiugigОценок пока нет
- Guia Helipuertos PDFДокумент9 страницGuia Helipuertos PDFSeiya Neyogiri NgupiОценок пока нет
- Biotipología CriminalДокумент5 страницBiotipología CriminalMaryori EvelynОценок пока нет
- INANNA - Cantos e Himnos de SumeriaДокумент89 страницINANNA - Cantos e Himnos de Sumeriaדוד יו100% (2)
- Ingresos Provenientes de Contratos Con ClientesДокумент4 страницыIngresos Provenientes de Contratos Con ClientesAbrahamC.VelásquezОценок пока нет
- Procesoso Tendencias de La EvolucionДокумент3 страницыProcesoso Tendencias de La EvolucionSoco FloresОценок пока нет
- Locomocion y BalanceДокумент14 страницLocomocion y BalanceJose Casanova100% (1)
- Op-Pets-Chm-13 Cambio de Forros de Main Shaft de Chancadora Metso LT330DДокумент23 страницыOp-Pets-Chm-13 Cambio de Forros de Main Shaft de Chancadora Metso LT330DIris Huamani MartinezОценок пока нет
- Instrucciones Tarea 3Документ3 страницыInstrucciones Tarea 3profesorbenitorevecoОценок пока нет
- Lista de Fonemas en EspañolДокумент2 страницыLista de Fonemas en EspañolGera Vasileva80% (5)
- Geomembrana GM13Документ4 страницыGeomembrana GM13PercyArgomedoОценок пока нет
- Coloración Del Pliegue Gular en AnolisДокумент7 страницColoración Del Pliegue Gular en AnolisElena AlonsoОценок пока нет