Вам также может понравиться
- Apuntes IntroduccionДокумент14 страницApuntes IntroduccionHernan RodriguezОценок пока нет
- G03. Cálculo Estructural. Cálculo de VigasДокумент23 страницыG03. Cálculo Estructural. Cálculo de VigasMonica Valencia GarciaОценок пока нет
- Manual Microsoft Project ProfessionalДокумент3 страницыManual Microsoft Project ProfessionalRodrigoОценок пока нет
- Manual Microsoft Project ProfessionalДокумент87 страницManual Microsoft Project ProfessionalcharlespalenciaОценок пока нет
- 5 91 1 PB PDFДокумент163 страницы5 91 1 PB PDFAmerica Cardenas Onton100% (1)
- 2 Cinematic AДокумент13 страниц2 Cinematic ARodrigoОценок пока нет
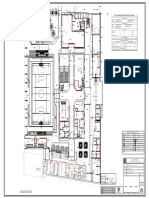
- LAM 5 DE 14 Plano Enchufes 1° NivelДокумент1 страницаLAM 5 DE 14 Plano Enchufes 1° NivelRodrigoОценок пока нет
- 4 JunioДокумент21 страница4 JunioAna Jacqueline Rodriguez MartinezОценок пока нет
- Cálculo de Autonomia de BateriasДокумент2 страницыCálculo de Autonomia de BateriasCasey Campos100% (4)
- Prueba de Jarras planta aguaДокумент17 страницPrueba de Jarras planta aguaNestor Augusto Oyarce100% (1)
- Subestaciones Triple BarraДокумент3 страницыSubestaciones Triple Barradavid MasterОценок пока нет
- Crear botones en GIMPДокумент10 страницCrear botones en GIMPlobodelaire1966Оценок пока нет
- Resumen EjecutivoДокумент15 страницResumen Ejecutivoestefani yanquenОценок пока нет
- La Vida Afectiva Del NiñoДокумент6 страницLa Vida Afectiva Del NiñoJessica Ramos de AgurtoОценок пока нет
- Tecnicas para El Desarrollo de La CreatividadДокумент16 страницTecnicas para El Desarrollo de La CreatividadFrancisca JavierОценок пока нет
- CÓMO FUNCIONA Y ESTÁ COMPUESTO EL DIFERENCIALДокумент12 страницCÓMO FUNCIONA Y ESTÁ COMPUESTO EL DIFERENCIALItamar De OliveiraОценок пока нет
- Proyecto Final ElectrónicaДокумент18 страницProyecto Final ElectrónicaJoaquin CadenaОценок пока нет
- Landscape A5 EsДокумент391 страницаLandscape A5 EsMartínMaldonadoОценок пока нет
- Problemas en Prestación de Servicios de SaludДокумент7 страницProblemas en Prestación de Servicios de Saludapi-3817904100% (2)
- Unidad 2 Comunicacion 2 3 NominacionДокумент11 страницUnidad 2 Comunicacion 2 3 Nominacionrosaritofcg1982100% (11)
- Didáctica general: enseñanza, aprendizaje y evaluaciónДокумент22 страницыDidáctica general: enseñanza, aprendizaje y evaluaciónVictoria AriasОценок пока нет
- Normas Técnicas Complementarias Sobre Criterios y Acciones para Diseño en EdificacionesДокумент18 страницNormas Técnicas Complementarias Sobre Criterios y Acciones para Diseño en EdificacionesMaricrés UríasОценок пока нет
- Problematicas SocialesДокумент15 страницProblematicas SocialesAna Luisa Morales BrionesОценок пока нет
- Indicadores de Logro Tesis GuatemalaДокумент96 страницIndicadores de Logro Tesis GuatemalaKaren Olivares0% (1)
- Sofística SócratesДокумент8 страницSofística SócratesJosé Ramos SalgueroОценок пока нет
- 2019 - Capacidades Científicas en El Trastorno Del Espectro Autista en México - Reflexiones Desde El Vínculo Entre Ciencia, Tecnología e Innovación y Políticas SocialesДокумент14 страниц2019 - Capacidades Científicas en El Trastorno Del Espectro Autista en México - Reflexiones Desde El Vínculo Entre Ciencia, Tecnología e Innovación y Políticas SocialesRaúl VerdugoОценок пока нет
- Sobre La Autoformacion Colectiva, Integral, Continua y Permanente de La Clase TrabajadoraДокумент48 страницSobre La Autoformacion Colectiva, Integral, Continua y Permanente de La Clase TrabajadoraJavierОценок пока нет
- Evaluaciones CinemáticaДокумент18 страницEvaluaciones CinemáticaDiegoОценок пока нет
- El Rumor en VenezuelaДокумент3 страницыEl Rumor en Venezuelaribs14Оценок пока нет
- Registró Auxiliar 6 EdaДокумент6 страницRegistró Auxiliar 6 EdaWalter Quispe AymaОценок пока нет
- Crea Modelo Relacional GA6Документ6 страницCrea Modelo Relacional GA6Henry James Mendoza ZepedaОценок пока нет
- FORMATO PROYECTO DE GRADO - TNTE. HUGO ORTIZ (Recuperado Automáticamente)Документ12 страницFORMATO PROYECTO DE GRADO - TNTE. HUGO ORTIZ (Recuperado Automáticamente)Ruben SolorzanoОценок пока нет
- Tarea 5Документ8 страницTarea 5ROSA CLEVEDOОценок пока нет
- CC 2010 Argumentación. Falacias DefiniciónДокумент1 страницаCC 2010 Argumentación. Falacias DefiniciónEdu GonikОценок пока нет
- Practica 1Документ8 страницPractica 1LESLIE POLET SUASTEGUI CABALLEROОценок пока нет
- Capitalismo de vigilancia: Shoshana Zubogg alerta sobre los peligros de la extracción masiva de datosДокумент10 страницCapitalismo de vigilancia: Shoshana Zubogg alerta sobre los peligros de la extracción masiva de datosAlejandro G. RuffoniОценок пока нет
- Planificación anual Ciencias NaturalesДокумент14 страницPlanificación anual Ciencias NaturalesBarbi DuranОценок пока нет