Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Diodes and CapacitorsДокумент35 страницDiodes and CapacitorsCaunhye TahibОценок пока нет
- IJETR032566Документ3 страницыIJETR032566erpublicationОценок пока нет
- NPN Silicon Epitaxial Planar Transistor D882Документ5 страницNPN Silicon Epitaxial Planar Transistor D882อาทิตย์ สมร่างОценок пока нет
- NeilДокумент47 страницNeilAbbaas AlifОценок пока нет
- Single PhasingДокумент6 страницSingle PhasingQuek Swee XianОценок пока нет
- Degradation of Polymeric Power Cable Due To Water Treeing Under AC and DC StressДокумент6 страницDegradation of Polymeric Power Cable Due To Water Treeing Under AC and DC StressGualadrakeОценок пока нет
- SMART MATERIALS MERITSДокумент6 страницSMART MATERIALS MERITSRahul Darshan Srt100% (2)
- Arm7 FamilyДокумент4 страницыArm7 FamilydanielОценок пока нет
- 60PP9100D 37Документ121 страница60PP9100D 37Miguel VargasОценок пока нет
- HO2 - Week2 - Crystal Structures - DiscussionДокумент25 страницHO2 - Week2 - Crystal Structures - Discussion오영웅Оценок пока нет
- Tired of Low Battery Voltage? Build A Step-Up DC-DC Converter!Документ2 страницыTired of Low Battery Voltage? Build A Step-Up DC-DC Converter!ferreira_tomarОценок пока нет
- Design and Construction of 1 KVA Power Inverter SystemДокумент14 страницDesign and Construction of 1 KVA Power Inverter SystemEdul BrianОценок пока нет
- 66 Series FinderДокумент5 страниц66 Series FinderaskcongoОценок пока нет
- Nick RF MV ProjectДокумент8 страницNick RF MV Projectag1tatorОценок пока нет
- Cnt-Fet A ReviewДокумент5 страницCnt-Fet A ReviewEr Ashish BahetiОценок пока нет
- 000 Free Energy Ac GeneratorДокумент5 страниц000 Free Energy Ac GeneratorKatamba Rogers100% (1)
- Procedure For Core Hotspot RepairДокумент3 страницыProcedure For Core Hotspot RepairRonald Dumangeng Pitpitunge60% (5)
- Fire Alarm DetectorДокумент4 страницыFire Alarm DetectorNEERAJ0% (1)
- TA0289 User Manual Rev181017Документ7 страницTA0289 User Manual Rev181017LamОценок пока нет
- DC Distribution SystemsДокумент133 страницыDC Distribution Systemstempmail604Оценок пока нет
- h25 Optical Incremental - Encoder TOLKO STRANDERДокумент2 страницыh25 Optical Incremental - Encoder TOLKO STRANDERJAGDEV PANESARОценок пока нет
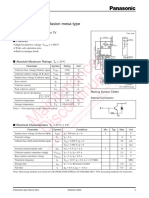
- C5884 PanasonicSemiconductorДокумент3 страницыC5884 PanasonicSemiconductorsarauseopОценок пока нет
- STM Tip Preparation GuideДокумент129 страницSTM Tip Preparation GuideptpangrybirdОценок пока нет
- Wireless Control For Industrial Instruments and Home Appliences at UhfДокумент4 страницыWireless Control For Industrial Instruments and Home Appliences at UhfNahush Bapat100% (1)
- Filters in GeneralДокумент3 страницыFilters in GeneralJoseGarciaRuizОценок пока нет
- LM350 Adjustable Voltage RegulatorДокумент33 страницыLM350 Adjustable Voltage RegulatorferdinandОценок пока нет
- Absolute EncoderДокумент7 страницAbsolute EncoderMark TorresОценок пока нет
- AD7376Документ20 страницAD7376Benny Alconn100% (1)
- Rikola LTD.: - Founded 1993 - Provides Tools For SpectralДокумент15 страницRikola LTD.: - Founded 1993 - Provides Tools For SpectralNatal GeoОценок пока нет
- Vlsi Deg 2016-HoutДокумент3 страницыVlsi Deg 2016-HoutGibin GeorgeОценок пока нет