Вам также может понравиться
- Centrifugal PumpДокумент6 страницCentrifugal PumpGilang AdityaОценок пока нет
- Centrifugal PumpДокумент6 страницCentrifugal PumpGilang AdityaОценок пока нет
- Dynamical Zeta Functions and Their ApplicationsДокумент46 страницDynamical Zeta Functions and Their Applicationsrichard_dalaud100% (1)
- SemiclassicalAnalysis PDFДокумент466 страницSemiclassicalAnalysis PDFderpyuniverseОценок пока нет
- Plasma Waves and Instabilities Lecture NotesДокумент170 страницPlasma Waves and Instabilities Lecture NotesGerové InvestmentsОценок пока нет
- mth101 Assignment SolutionДокумент3 страницыmth101 Assignment Solutioncs619finalproject.comОценок пока нет
- 4th Yr 2nd Sem Fees ShovanДокумент1 страница4th Yr 2nd Sem Fees ShovanMd Mehbub SamratОценок пока нет
- Geometric Group Theory, and IntroductionДокумент231 страницаGeometric Group Theory, and IntroductionDiego Carvajal100% (3)
- The Double Pendulum Problem: Franziska Von Herrath & Scott Mandell May 19, 2000Документ20 страницThe Double Pendulum Problem: Franziska Von Herrath & Scott Mandell May 19, 2000Zuhair Mohammed OmerОценок пока нет
- Classical Dynamics and Calculus of VariationДокумент24 страницыClassical Dynamics and Calculus of VariationAtharv AryaОценок пока нет
- Triennale PDFДокумент45 страницTriennale PDFIsrael RiveraОценок пока нет
- RWTH Advanced Lab Course For Physics - Detector PrinciplesДокумент26 страницRWTH Advanced Lab Course For Physics - Detector PrinciplesEnzo SanfratelloОценок пока нет
- Harmonic Analysis Lecture on Approximation of Identity, ConvolutionsДокумент47 страницHarmonic Analysis Lecture on Approximation of Identity, ConvolutionsJustОценок пока нет
- Bachelorproject Fractional CalculusДокумент31 страницаBachelorproject Fractional CalculusMinzilya -Svetlana KosmakovaОценок пока нет
- COMPLEX ANALYSIS - Semester 2016-1: Robert Oeckl - CA NOTES - 01/12/2015Документ75 страницCOMPLEX ANALYSIS - Semester 2016-1: Robert Oeckl - CA NOTES - 01/12/2015Oscar Daniel ChávezОценок пока нет
- Aarhus University: Steady Diffusion Problem (2D Mixed Formulation)Документ14 страницAarhus University: Steady Diffusion Problem (2D Mixed Formulation)Javier Ignacio Camacho HernandezОценок пока нет
- Introduction to Partial Differential EquationsДокумент127 страницIntroduction to Partial Differential EquationsAkshayОценок пока нет
- Decomposition NotesДокумент36 страницDecomposition NotesShikhaОценок пока нет
- Notes CalculusI Chapter2Документ14 страницNotes CalculusI Chapter2DanielОценок пока нет
- Riemann Surfaces and Holomorphic FunctionsДокумент127 страницRiemann Surfaces and Holomorphic FunctionsJaa JaarОценок пока нет
- Condensed Matter Physics Lecture Notes (PDFDrive)Документ41 страницаCondensed Matter Physics Lecture Notes (PDFDrive)Dulen BoraОценок пока нет
- Classical Field Theory & Relativistic Quantum MechanicsДокумент36 страницClassical Field Theory & Relativistic Quantum MechanicsJoydeep NaskarОценок пока нет
- Lecture Notes on Inverse Problems and Regularization MethodsДокумент45 страницLecture Notes on Inverse Problems and Regularization MethodsJulianDavidPulidoОценок пока нет
- Scalar Fields ThesisДокумент29 страницScalar Fields ThesisPero PericОценок пока нет
- Ma432 Classical Field Theory: Notes by Chris BlairДокумент34 страницыMa432 Classical Field Theory: Notes by Chris BlairPim BormanОценок пока нет
- Polki ChemistryДокумент50 страницPolki Chemistryfranklee0000Оценок пока нет
- Algorithms For EllipsoidsДокумент49 страницAlgorithms For EllipsoidsDishank BansalОценок пока нет
- Stat Mech NotesДокумент46 страницStat Mech NoteschiemenaОценок пока нет
- Sacco Thesis PDFДокумент22 страницыSacco Thesis PDFDavid SaccoОценок пока нет
- Brian J. Mccartin - Laplacian Eigenstructure of The Equilateral TriangleДокумент210 страницBrian J. Mccartin - Laplacian Eigenstructure of The Equilateral TriangleMilan DragojlovicОценок пока нет
- Module 3F2: Systems and Control Lecture Notes 1: State-Space SystemsДокумент32 страницыModule 3F2: Systems and Control Lecture Notes 1: State-Space SystemsCuong ChuОценок пока нет
- Eindhoven University of Technology: Award Date: 2014Документ45 страницEindhoven University of Technology: Award Date: 2014nine nineОценок пока нет
- Standard ModelДокумент111 страницStandard ModelMallika P. ShivamОценок пока нет
- Pde2012 zp158064Документ85 страницPde2012 zp158064Narendra babu krishnanОценок пока нет
- QFFF Thesis 09Документ116 страницQFFF Thesis 09nicolasroblesОценок пока нет
- An Introduction to O-Minimal Geometry (INTRO-OMINДокумент82 страницыAn Introduction to O-Minimal Geometry (INTRO-OMINVermo FouqueОценок пока нет
- Matching in Nonrelativistic Effective Quantum Field TheoriesДокумент78 страницMatching in Nonrelativistic Effective Quantum Field TheoriesBayer MitrovicОценок пока нет
- SSH AwДокумент191 страницаSSH AwmuzammalsafdarОценок пока нет
- QFFF ThesisДокумент116 страницQFFF Thesisgoeth314Оценок пока нет
- Fourier Analysis Notes, Spring 2020Документ77 страницFourier Analysis Notes, Spring 2020ZechОценок пока нет
- Lecture Notes On Several Complex Variables: Math 650, Fall 2007 Texas A&M UniversityДокумент48 страницLecture Notes On Several Complex Variables: Math 650, Fall 2007 Texas A&M UniversityelhamОценок пока нет
- Zeta Function Regularization PDFДокумент116 страницZeta Function Regularization PDFarnoldo3551Оценок пока нет
- 2Документ33 страницы2Anonymous 2xjDjAcZ100% (1)
- Advanced Quantum Field Theory (2023) - Miranda C.N. ChengДокумент67 страницAdvanced Quantum Field Theory (2023) - Miranda C.N. ChengcesarantoineОценок пока нет
- Problems-Chapter2 Calculus I UC3MДокумент10 страницProblems-Chapter2 Calculus I UC3MDanielОценок пока нет
- DifferentialEq 2Документ61 страницаDifferentialEq 2Sanjeev khatriОценок пока нет
- Cieliebak - Symplectic Geometry AДокумент108 страницCieliebak - Symplectic Geometry ARenato GaloisОценок пока нет
- CALCULUS I PROBLEMSДокумент10 страницCALCULUS I PROBLEMSDanielОценок пока нет
- AM2 FTU Official 2022 NOV 23 C2Документ40 страницAM2 FTU Official 2022 NOV 23 C2Huy ĐoànОценок пока нет
- Lecture Notes CoV 2021Документ99 страницLecture Notes CoV 2021Luca DentiОценок пока нет
- FKP_ENДокумент91 страницаFKP_ENwaswaangelОценок пока нет
- Finding Spin-Glass Ground States Using Quantum Walks PDFДокумент30 страницFinding Spin-Glass Ground States Using Quantum Walks PDFiviОценок пока нет
- Applications of Differential Geometry To Physics: Cambridge Part III MathsДокумент29 страницApplications of Differential Geometry To Physics: Cambridge Part III MathsDimitris FetsiosОценок пока нет
- Introduction To The Geometry of Classical DynamicsДокумент74 страницыIntroduction To The Geometry of Classical DynamicsnunocalistoОценок пока нет
- Notes On Mathematics of Quantum Mechanics: Sadi TurgutДокумент56 страницNotes On Mathematics of Quantum Mechanics: Sadi TurgutyavuzОценок пока нет
- Groups PDFДокумент27 страницGroups PDFanil ariОценок пока нет
- Tese Pedro Carrilho 63431Документ46 страницTese Pedro Carrilho 63431Shibu lalОценок пока нет
- Lyapunov Exponents-Lecture NotesДокумент22 страницыLyapunov Exponents-Lecture NotesEanesОценок пока нет
- Adam - Hall-Senior ThesisДокумент103 страницыAdam - Hall-Senior ThesisMo SaОценок пока нет
- Perona-Malik Equation and Its Numerical Properties: Wydział Matematyki, Informatyki I MechanikiДокумент27 страницPerona-Malik Equation and Its Numerical Properties: Wydział Matematyki, Informatyki I MechanikiBet BetОценок пока нет
- Lecture Notes On Harmonic AnalysisДокумент191 страницаLecture Notes On Harmonic AnalysisHristo LinkovОценок пока нет
- Geophysics Signal Processing NotesДокумент88 страницGeophysics Signal Processing NotesMridula Mittal BansalОценок пока нет
- Anal 2Документ34 страницыAnal 2Natalia Son VargasОценок пока нет
- The Finite Element Method for Electromagnetic ModelingОт EverandThe Finite Element Method for Electromagnetic ModelingGérard MeunierОценок пока нет
- ESE 2019 Prelims Classroom Test SeriesДокумент9 страницESE 2019 Prelims Classroom Test SeriesdfghjklОценок пока нет
- End Semester Question Paper With Model SolutionДокумент16 страницEnd Semester Question Paper With Model SolutionSwapnil RahaneОценок пока нет
- Aluminum and Magnesium Metal Matrix Nanocomposites by M GuptaДокумент171 страницаAluminum and Magnesium Metal Matrix Nanocomposites by M GuptaMd Mehbub SamratОценок пока нет
- Online Advertisement 5may2021Документ7 страницOnline Advertisement 5may2021Md Mehbub SamratОценок пока нет
- DocumentДокумент1 страницаDocumentMd Mehbub SamratОценок пока нет
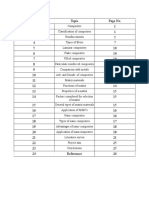
- Types and Properties of Composite MaterialsДокумент1 страницаTypes and Properties of Composite MaterialsMd Mehbub SamratОценок пока нет
- APPLICATION FOR EMPLOYMENTДокумент6 страницAPPLICATION FOR EMPLOYMENTMd Mehbub SamratОценок пока нет
- Dissertation (Autosaved)Документ16 страницDissertation (Autosaved)Md Mehbub SamratОценок пока нет
- Castability of Al-Sicp MetalДокумент8 страницCastability of Al-Sicp MetalMd Mehbub SamratОценок пока нет
- Types and Properties of Composite MaterialsДокумент1 страницаTypes and Properties of Composite MaterialsMd Mehbub SamratОценок пока нет
- 1st Yr 2nd Sem R AdmitДокумент1 страница1st Yr 2nd Sem R AdmitMd Mehbub SamratОценок пока нет
- Study On Indentation Size Effect of Metallic Specimen: Bachelor of Engineering IN Mechanical EngineeringДокумент16 страницStudy On Indentation Size Effect of Metallic Specimen: Bachelor of Engineering IN Mechanical EngineeringMd Mehbub SamratОценок пока нет
- G239Q56ApplicationForm PDFДокумент1 страницаG239Q56ApplicationForm PDFMd Mehbub SamratОценок пока нет
- Ds ProjectsДокумент1 страницаDs ProjectsMd Mehbub SamratОценок пока нет
- Activador W 10Документ1 страницаActivador W 10Maryorie Mariel0% (1)
- UPSC Prelims Syllabus: Syllabus of Paper I (200 Marks) Duration: 2 HoursДокумент1 страницаUPSC Prelims Syllabus: Syllabus of Paper I (200 Marks) Duration: 2 HoursAshwani KumarОценок пока нет
- DocumentДокумент1 страницаDocumentMd Mehbub SamratОценок пока нет
- Activador W 10Документ1 страницаActivador W 10Maryorie Mariel0% (1)
- Cent Pum-NbДокумент27 страницCent Pum-Nbmass3444Оценок пока нет
- E-Receipt For State Bank Collect PaymentДокумент1 страницаE-Receipt For State Bank Collect PaymentMd Mehbub SamratОценок пока нет
- Rinl RFCLДокумент1 страницаRinl RFCLMd Mehbub SamratОценок пока нет
- 31 PumpДокумент21 страница31 Pumporchids28Оценок пока нет
- PGC 11 11 17Документ1 страницаPGC 11 11 17Md Mehbub SamratОценок пока нет
- Euler RigidBodyДокумент13 страницEuler RigidBodyMd Mehbub SamratОценок пока нет
- ProjectДокумент33 страницыProjectMd Mehbub SamratОценок пока нет
- Chapter 7 Differential EquationsДокумент15 страницChapter 7 Differential Equationssyamimi balkhisОценок пока нет
- Measure of Central Tendency PDFДокумент47 страницMeasure of Central Tendency PDFAbdul HaseebОценок пока нет
- CMSC 451: Maximum Bipartite Matching: Slides By: Carl KingsfordДокумент18 страницCMSC 451: Maximum Bipartite Matching: Slides By: Carl KingsfordMohamed KobeissiОценок пока нет
- Computer Application in ChEДокумент5 страницComputer Application in ChEArrianne Jaye MataОценок пока нет
- Coordinate Geometry (S3) 2019-20Документ3 страницыCoordinate Geometry (S3) 2019-20極光、Оценок пока нет
- Board of Intermediate Education (Ap) : Junior Inter MathematicsДокумент2 страницыBoard of Intermediate Education (Ap) : Junior Inter MathematicsRajesh PinjarlaОценок пока нет
- Airbus Quantum Computing Challenge PS2 March 2019Документ10 страницAirbus Quantum Computing Challenge PS2 March 2019Wish SОценок пока нет
- Edexcel GCE: Specimen Paper Time: 1 Hour 30 MinutesДокумент4 страницыEdexcel GCE: Specimen Paper Time: 1 Hour 30 MinutesAhmed MohamedОценок пока нет
- H∞ Control Design for HIMAT SystemДокумент7 страницH∞ Control Design for HIMAT SystemAngel Nuñez PachecoОценок пока нет
- Baire's Theorem and Its Applications in AnalysisДокумент5 страницBaire's Theorem and Its Applications in AnalysisJosephPmОценок пока нет
- Optimum Structural Design Based On Isogeometric Analysis MethodДокумент5 страницOptimum Structural Design Based On Isogeometric Analysis MethodficuniОценок пока нет
- Signals and Systems Lab 08 PDFДокумент9 страницSignals and Systems Lab 08 PDFhamzaОценок пока нет
- Progression Test 2023-Paper1Документ17 страницProgression Test 2023-Paper1huangzhouexportОценок пока нет
- Chapter 04Документ94 страницыChapter 04itsmohanecomОценок пока нет
- Numerical Methods in Civil Engg-Janusz ORKISZ PDFДокумент154 страницыNumerical Methods in Civil Engg-Janusz ORKISZ PDFRajesh CivilОценок пока нет
- 5 Persamaan Cauchy - EulerДокумент9 страниц5 Persamaan Cauchy - EulerPutra BangsawanОценок пока нет
- Mste 1.0 Algebra Hand OutsДокумент19 страницMste 1.0 Algebra Hand OutsJasmine MartinezОценок пока нет
- CO350 Linear Programming Chapter 5: Basic Solutions: 1st June 2005Документ10 страницCO350 Linear Programming Chapter 5: Basic Solutions: 1st June 2005BHAVPRITAОценок пока нет
- Set Invariance Under Output Feedback A Set Dynamics ApproachДокумент18 страницSet Invariance Under Output Feedback A Set Dynamics ApproachtiagoalvesaiОценок пока нет
- Free Vibration: Chopra: Prentice-Hall PAGES JUL. 19, 2000 14:25 ICC Oregon (503) 221-9911Документ46 страницFree Vibration: Chopra: Prentice-Hall PAGES JUL. 19, 2000 14:25 ICC Oregon (503) 221-9911MakaraSoyОценок пока нет
- Special Types of Matrices: By: Engr. Glenda Alega - de MesaДокумент22 страницыSpecial Types of Matrices: By: Engr. Glenda Alega - de Mesasairin parkОценок пока нет
- Bma63/Uma63 - Complex Analysis - Ii: Gßó Öuõh SS J (Suø ÷/õvupДокумент6 страницBma63/Uma63 - Complex Analysis - Ii: Gßó Öuõh SS J (Suø ÷/õvupJohnsonОценок пока нет
- Lesson 8 Diagonalization of Matrices: Module 1: Matrices and Linear AlgebraДокумент8 страницLesson 8 Diagonalization of Matrices: Module 1: Matrices and Linear Algebraarpit sharmaОценок пока нет
- The Complex Gradient Operator and The: CR-CalculusДокумент74 страницыThe Complex Gradient Operator and The: CR-CalculusrllandaОценок пока нет
- (Universitext) Sterling K. Berberian (Auth.) - Fundamentals of Real Analysis (1999, Springer) (10.1007 - 978-1-4612-0549-4) - Libgen - LiДокумент490 страниц(Universitext) Sterling K. Berberian (Auth.) - Fundamentals of Real Analysis (1999, Springer) (10.1007 - 978-1-4612-0549-4) - Libgen - LiAlihan aydınОценок пока нет
- Translation of The Kimberling's Glossary Into Barycentrics (V48-Dvipdfm)Документ231 страницаTranslation of The Kimberling's Glossary Into Barycentrics (V48-Dvipdfm)AltananyОценок пока нет
- Just The Facts On The Normal Distribution - Preview The DocumentДокумент10 страницJust The Facts On The Normal Distribution - Preview The DocumentVivian Brooklyn ChenОценок пока нет
- Economics and Optimization TechniquesДокумент163 страницыEconomics and Optimization TechniquesKiran KuppaОценок пока нет