Вам также может понравиться
- Desarrollo de Software Ágil: Extreme Programming y ScrumОт EverandDesarrollo de Software Ágil: Extreme Programming y ScrumРейтинг: 5 из 5 звезд5/5 (1)
- Cuadro Comparativo Metodos de ProspectivaДокумент6 страницCuadro Comparativo Metodos de Prospectivajuan PATIÑO40% (5)
- 3.2 Estrategias de Busqueda InformadaДокумент32 страницы3.2 Estrategias de Busqueda InformadaZavier Quinde100% (1)
- Cuadro Comparativo Metodos ProspectivaДокумент21 страницаCuadro Comparativo Metodos ProspectivaBrayant Stick SANCHEZ BOLANOSОценок пока нет
- Ceron Herrera Jose de Jesus R2 U1Документ9 страницCeron Herrera Jose de Jesus R2 U1José de Jesús Cerón HerreraОценок пока нет
- Cuadro ComparativoДокумент2 страницыCuadro ComparativoariannyОценок пока нет
- Búsquedas Sample IДокумент5 страницBúsquedas Sample IJHOAN SEBASTIAN ARIAS BARROSОценок пока нет
- Unidad 3Документ48 страницUnidad 3Johan Michael RodriguezОценок пока нет
- A06 Cuadro Comparativo Metodo Vogel, Esquina Noroeste y AsignacionpdfДокумент5 страницA06 Cuadro Comparativo Metodo Vogel, Esquina Noroeste y AsignacionpdfEscob4rt099Оценок пока нет
- Heuristica PDFДокумент8 страницHeuristica PDFRodovarОценок пока нет
- Ensayo Tema3Документ4 страницыEnsayo Tema3Eric PattersonОценок пока нет
- Tarea 5 Procesos Cognitivos PDFДокумент7 страницTarea 5 Procesos Cognitivos PDFKyara MercedesОценок пока нет
- HeurísticaДокумент8 страницHeurísticaAndrés Zhunio CampoverdeОценок пока нет
- Proyecto de InvestigacionДокумент31 страницаProyecto de InvestigacionCristian Alexander LenizОценок пока нет
- Programacion Por Metas InvestigacionДокумент12 страницProgramacion Por Metas InvestigacionJESUS LEONARDO DELGADO ZAMBRANOОценок пока нет
- Métodos de Búsqueda HeurísticaДокумент1 страницаMétodos de Búsqueda HeurísticaIsmary MendozaОценок пока нет
- Ia - Conceptos Semana 11Документ18 страницIa - Conceptos Semana 11Maritza AguirreОценок пока нет
- Recocido SimuladoДокумент6 страницRecocido SimuladoJuan Carlos Pinto SalamancaОценок пока нет
- Toma de Decisiones GerencialesДокумент9 страницToma de Decisiones GerencialesDeivys CaraballoОценок пока нет
- Busqueda No Informada e InformadaДокумент8 страницBusqueda No Informada e InformadaEdii SoonОценок пока нет
- Busqueda Local IteradaДокумент11 страницBusqueda Local IteradaMilena PinargoteОценок пока нет
- Localización DimanicaДокумент9 страницLocalización DimanicaAlejhongo MontañaОценок пока нет
- Taller de BúsquedaДокумент6 страницTaller de BúsquedalaurientОценок пока нет
- Busqueda Tabú - IEEEДокумент4 страницыBusqueda Tabú - IEEEJohana HernándezОценок пока нет
- RECURSIVIDAD Y LOGICA PROPOSICIONAL - AlGEBRA Y LOGICA COMPUTACIONAL - INTEGRADOR UCPДокумент20 страницRECURSIVIDAD Y LOGICA PROPOSICIONAL - AlGEBRA Y LOGICA COMPUTACIONAL - INTEGRADOR UCPBenjamin BenitezОценок пока нет
- Mod03INF513 PresentacionДокумент184 страницыMod03INF513 PresentacionEric PattersonОценок пока нет
- Funciones HeurísticasДокумент12 страницFunciones HeurísticasOscar TeseОценок пока нет
- Cuadro Comparativo ProspectivaДокумент6 страницCuadro Comparativo ProspectivaGeorge JalvarezОценок пока нет
- ACT 1.1 - Planeacion y Diseño de InstalacionesДокумент9 страницACT 1.1 - Planeacion y Diseño de InstalacionesCarmen ChanОценок пока нет
- A#2 GDMPPDFДокумент5 страницA#2 GDMPPDFMemoide MarquezОценок пока нет
- ALGORITMOS PARA RESOLVER UN PROBLEMA SOBRE Regenerator Location ProblemДокумент7 страницALGORITMOS PARA RESOLVER UN PROBLEMA SOBRE Regenerator Location ProblemSasha SalsanОценок пока нет
- EuristicaДокумент2 страницыEuristicaGuerra Orozco Santiago de JesúsОценок пока нет
- Programacion MultiobjetivoДокумент17 страницProgramacion MultiobjetivoKaren EliОценок пока нет
- Investigación de OperacionesДокумент9 страницInvestigación de Operacionesjucamaga1458Оценок пока нет
- Inv Io U3 Karina PDFДокумент11 страницInv Io U3 Karina PDFKarina Martinez ColoradoОценок пока нет
- Cuadro de PronosticosДокумент2 страницыCuadro de PronosticosJesus MagallanesОценок пока нет
- Resolucion de ProblemasДокумент3 страницыResolucion de Problemasismael pdОценок пока нет
- Complejidad ComputacionalДокумент8 страницComplejidad ComputacionalJudith Adilene Andrade PerezОценок пока нет
- Tarea 3, MAS - 13, Cuadro ComparativoДокумент7 страницTarea 3, MAS - 13, Cuadro ComparativoSheila Rodríguez LópezОценок пока нет
- Diferencias Entre VRP y TSPДокумент1 страницаDiferencias Entre VRP y TSPDillanHookerGuillenОценок пока нет
- Demanda CognitivaДокумент32 страницыDemanda CognitivaROCIO MARTINОценок пока нет
- Método Heurístico para Problemas BinarosДокумент2 страницыMétodo Heurístico para Problemas BinarosJesus Orlando Gonzales PatОценок пока нет
- Resolución de Problema y Toma de DesicionesДокумент1 страницаResolución de Problema y Toma de DesicionesRodríguez Gutiérrez Alison Nazli - 1IM17Оценок пока нет
- Busqueda Voraz Primero El MejorДокумент14 страницBusqueda Voraz Primero El MejorLuis Fernando Rodriguez Mendia100% (1)
- 2.3 Algortimos MetaheuristicosДокумент22 страницы2.3 Algortimos MetaheuristicosANGELICA ALEXANDRA JARAMILLO SANDOVALОценок пока нет
- Actividad 4Документ6 страницActividad 4Marisol BelloОценок пока нет
- Práctica Búsquedas HeurísticasДокумент2 страницыPráctica Búsquedas HeurísticasCandela GomezОценок пока нет
- Eje 2 OptativaДокумент11 страницEje 2 OptativaLidelys RodriguezОценок пока нет
- Cuadro ComparativoДокумент3 страницыCuadro ComparativoMyrnaОценок пока нет
- Eved - 1P - Seminario 2Документ16 страницEved - 1P - Seminario 2Alex MendozaОценок пока нет
- Grupo 39 - Fase2Документ19 страницGrupo 39 - Fase2Steven ClarosОценок пока нет
- Informe de BusquedaДокумент13 страницInforme de BusquedaCamilo MartinezОценок пока нет
- Ii.5ºb - Idoii.u1 - Cuadro Comparativo - Cruz LuisДокумент3 страницыIi.5ºb - Idoii.u1 - Cuadro Comparativo - Cruz LuisL Manuel CruzОценок пока нет
- Técnicas Cualitativas y CuantitativasДокумент2 страницыTécnicas Cualitativas y CuantitativasJennySantiagoОценок пока нет
- Técnicas de Toma de DecisionesДокумент30 страницTécnicas de Toma de DecisionesDiana HernandezОценок пока нет
- Tarea 2 Métodos CuantitativosДокумент16 страницTarea 2 Métodos CuantitativosMarcel GraterolОценок пока нет
- Tarea 2 Métodos CuantitativosДокумент16 страницTarea 2 Métodos CuantitativosMarcel Graterol0% (2)
- Tarea 2 Métodos CuantitativosДокумент16 страницTarea 2 Métodos CuantitativosMarcel GraterolОценок пока нет
- Complejidad ComputacionalДокумент8 страницComplejidad ComputacionalJudith Adilene Andrade PerezОценок пока нет
- Tutoria Numero Tres Programación de Sistemas IntelignetesДокумент7 страницTutoria Numero Tres Programación de Sistemas Inteligneteswalter patiñoОценок пока нет
- Ecuación ExponencialДокумент9 страницEcuación ExponencialTommy Daniel GonzalesОценок пока нет
- ModuloДокумент5 страницModuloTommy Daniel GonzalesОценок пока нет
- Una Estación de AmorДокумент2 страницыUna Estación de AmorTommy Daniel Gonzales100% (1)
- El Torito de La Piel BrillanteДокумент5 страницEl Torito de La Piel BrillanteTommy Daniel Gonzales100% (1)
- ModuloДокумент5 страницModuloTommy Daniel GonzalesОценок пока нет
- Constancia de Apta para El CovidДокумент2 страницыConstancia de Apta para El CovidTommy Daniel GonzalesОценок пока нет
- Modulo Medidas de CentralizacionДокумент2 страницыModulo Medidas de CentralizacionTommy Daniel GonzalesОценок пока нет
- NúmeroДокумент1 страницаNúmeroTommy Daniel GonzalesОценок пока нет
- Anexo 10 Formato de Conformidad de Servicio Enero 2Документ5 страницAnexo 10 Formato de Conformidad de Servicio Enero 2Tommy Daniel GonzalesОценок пока нет
- Modulo 06-S4-Función de Reproducción-2006Документ5 страницModulo 06-S4-Función de Reproducción-2006Tommy Daniel GonzalesОценок пока нет
- Semana 01 DTemas Grupales de TrabajoДокумент2 страницыSemana 01 DTemas Grupales de TrabajoTommy Daniel GonzalesОценок пока нет
- ProyectoДокумент30 страницProyectoTommy Daniel GonzalesОценок пока нет
- Apoyo Al CompañeroДокумент1 страницаApoyo Al CompañeroTommy Daniel GonzalesОценок пока нет
- Fin de La Persona NaturalДокумент5 страницFin de La Persona NaturalTommy Daniel GonzalesОценок пока нет
- Alvarez Moreno, Luz MariaДокумент44 страницыAlvarez Moreno, Luz MariaMatrixDVRОценок пока нет
- Modelo MG1Документ4 страницыModelo MG10AvendanoОценок пока нет
- Unidad 4Документ11 страницUnidad 4Saud ReverónОценок пока нет
- Plan de Intervención...Документ4 страницыPlan de Intervención...Romina Pollett AngelОценок пока нет
- CM6800-32X6 Manual Esp PDFДокумент90 страницCM6800-32X6 Manual Esp PDFMarco CruzОценок пока нет
- Unidad 3 RMIДокумент7 страницUnidad 3 RMIMartin Marin ZarateОценок пока нет
- Arquitectura EmpresarialДокумент15 страницArquitectura EmpresarialLuis Fernando Valverde CastilloОценок пока нет
- SOMO-14D Guia RapidaДокумент14 страницSOMO-14D Guia RapidaMarco Guevara BonillaОценок пока нет
- Ada 4Документ4 страницыAda 4andres Guadalupe laynes FloresОценок пока нет
- Algoritmos y ProgramacionДокумент808 страницAlgoritmos y ProgramacionAles EscОценок пока нет
- Instructivo e-SICOL PDFДокумент34 страницыInstructivo e-SICOL PDFMartin ArinОценок пока нет
- Qué Es NoSQLДокумент4 страницыQué Es NoSQLLuis Enrique MtzОценок пока нет
- Manual HonducomprasДокумент54 страницыManual HonducomprasLuis AmadorОценок пока нет
- Práctica 9. Instalación y Configuración de Un S.O. en VMWareДокумент2 страницыPráctica 9. Instalación y Configuración de Un S.O. en VMWareE&GОценок пока нет
- Plantilla - AlgoritmiaДокумент9 страницPlantilla - Algoritmiaroberto.martinez8198Оценок пока нет
- Transacciones, Triggers, ExcepcionesДокумент3 страницыTransacciones, Triggers, ExcepcionesCarlosMAОценок пока нет
- Como Arrancar Un CD Live en Bios UEFI FacilДокумент4 страницыComo Arrancar Un CD Live en Bios UEFI FacilJose Angel Romero RodriguezОценок пока нет
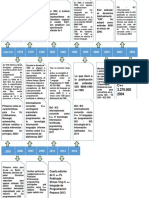
- Linea TiempoДокумент2 страницыLinea TiempoAlba Pedregón67% (3)
- Computación EvolutivaДокумент3 страницыComputación EvolutivaRoni DominguezОценок пока нет
- R0219302b Ed3Документ14 страницR0219302b Ed3M Casanova PIОценок пока нет
- Call XpressДокумент25 страницCall XpressJL HMОценок пока нет
- Trabajo Nro 18 - CASO MRPДокумент3 страницыTrabajo Nro 18 - CASO MRPHilary Ingaruca VelasquezОценок пока нет
- Simulacion de Sistemas DiscretosДокумент9 страницSimulacion de Sistemas DiscretosLuis Miguel Fuentes CanalesОценок пока нет
- PDF Guia Impo ChinaДокумент39 страницPDF Guia Impo ChinaGilmer Logistica AduaneraОценок пока нет
- Oracle - Vistas MaterializadasДокумент2 страницыOracle - Vistas MaterializadasJavier de la CruzОценок пока нет
- EtapasДокумент20 страницEtapasNotjuanОценок пока нет
- Series de TiempoДокумент18 страницSeries de TiempoJhonerValdezValdivianoОценок пока нет
- KPLR U3 A1 JafoДокумент6 страницKPLR U3 A1 JafoDaniel SanchezОценок пока нет
- Ejercicios 1 Estudiante B. Variables SeparablesДокумент4 страницыEjercicios 1 Estudiante B. Variables SeparablesRafael RodriguezОценок пока нет
- SistemasДокумент5 страницSistemasCristian CaizaОценок пока нет